Изобретение относится к манипуляторам и может быть использовано, например, при исследовании объектов в высоковакуумных камерах.
Известно устройство для перемещения объектов в рабочую зону, содержащее основание и транспортную платформу со схватом, имеющим двуплечие рычаги ulJ.
Недостаткомизвестного устройства является то, что из-за конструктивных особенностей манипуляции этим устройством в рабочей зонес высоким вакуумом вызывают большие затраты энергии на вакуумирование этой зоны. Кроме того конструкция устройства не обеспечивает автоматизации технологического цикла, что ограничивает область его применения и сужает технологические возможности.
Цель изобретения - расширение технологических возможностей.
Поставленная цель достигается тем, что устройство для перемещения объектов в рабочую зону, содержащее основание и транспортную платформу со схватом, имеющем двуплечие рычаги, снабжено смонтированными на основании упорами, обоймой с фиксатором, а также установленным в рабочей зоне дополнительным.захвато выполненным в виде корпуса с размещенными на нем губками и подпружи-ненными относительно корпуса юпорой и собачками, причем в скват дополнительно введен п.одпружиненный относительно него толкатель со штырем, на конце которого выполнено углубление под фиксатор а двуплечие рычаги снабжены выступами, кроме того в обойме выполнены отверстия под ттырь, зацепы и направляющие пазы под губки дополнительно захвата, при этом обойма размещена на транспортной платформе с возможностью ее перемещения и взаимодействия с собачками и упором дополнительного захвата и толкателем охвата, а каждый из двуплечих рычагов последнего установлен с возможностью его взаимодействия одним плечом с собачками, а выступом этого плеча - с зацепом обоймы, а другим плечом - с упором основания.
Губки дополнительного захвата выполнены Б гпще VIOJUIKOB , одна пара которых жестко закреплена на
корпусе, а другая - подпружинена относительно него.
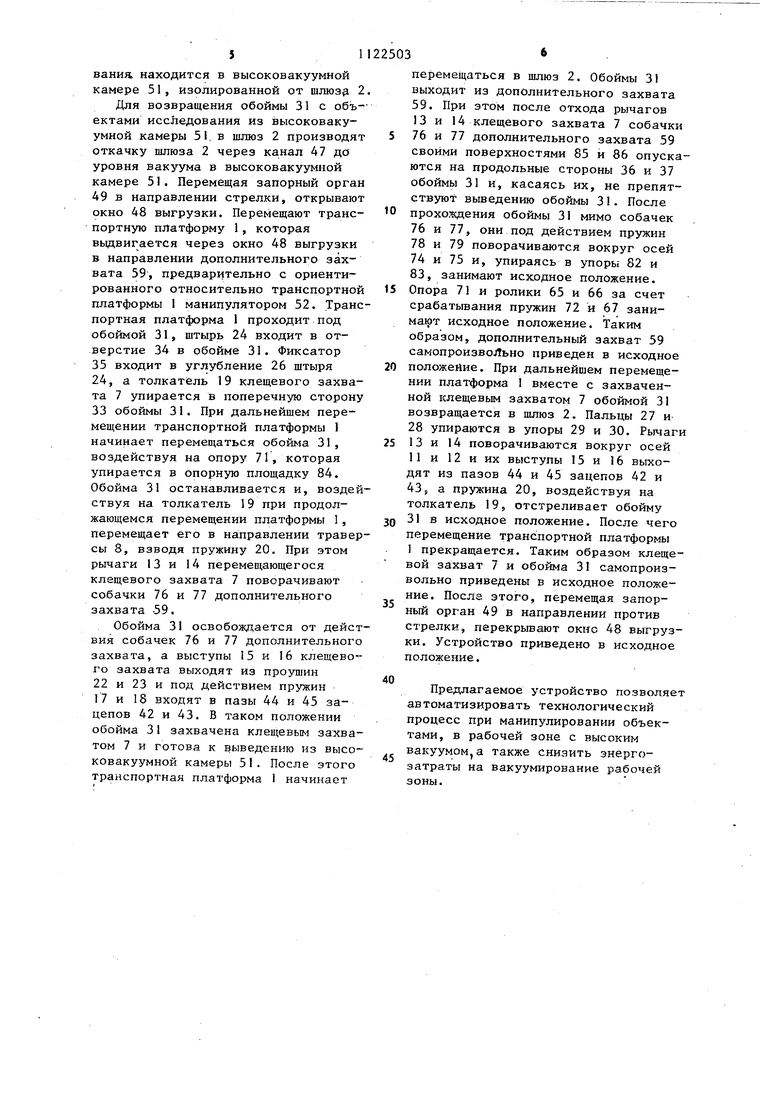
На фиг. ) изображено устройство для перемещения объектов в рабочую зону в исх,одном положении, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - часть обоймы в рабочей зоне в момент ее захвата дополнительным захватом; на фиг. 4 - часть
0 обоймы в рабочей зоне в момент ее захвата клещевым захватом; на фиг. 5 - часть обоймы, вид со стороны ее зацепов.
Устройство для перемещения объек5 тов в рабочую зону содержит транспортную платформу 1, установленную в шлюзе 2 и выполненную в виде направляющих 3 и А, например роликовых. Оси роликов 5 направляющей 4
0 закреплены на основании 6 шлюза .2. На платформе 1 закреплен клещевой захват 7, состоящий из траверсы 8 с проушинами 9 и 10, в которых на осях 11 и 12 установлены поворотные
5 рычаги 13 и 14 с выступами 15 и 16 на концах. Рычаги 53 и 14 находятся под действием пружин 17 и 18 растяжения. По оси симметрии траверсы 8 установлен толкатель 19, перемещение которого под действием пружины 20 сжатия ограничено гайкой 21, В проушинах 22 и 23 толкателя 19 размещены выступы 15 и 16, для которых проушины являются направляющими. На наружной стороне толкателя 19 по его оси симметрии закреплен штырь 24 с заходным конусом 25 и углублением 26 для фиксации. На противоположных выступах 15 и 16, плечах рычагов 13 и 14 установлены резьбовые пальцы 27 и 28, взаимодействукщне с упорами 29 и 30, закрепленными на основании 6 шлюза 2. На платформе 1 размещена обойма 31 с карманом 32 для размещения транспортируемых объектов. В поперечной стороне 33 обоймы 31 соосно штырью 24 толкателя 19 выполнено отверстие 34, в которое входит штырь 24. В углубление 26 штыря 24 входит лодпружиненньй фиксатор 35. В продольных сторонах 36 и 37 обоймы 31 вьтолнены направляющие 38 и 39 с заходными конусами 40 и 41 и зацепы 42 и 43 с пазами 44 и 45. Шлюз
5 2 содержит 46, канал 47, соединяющий шлюз 2 с магистралью откачки вакуума, и окно 48 выгрузки, закрытое запорным органом 49 клапана 50, Шлюз 2 со стороны окна 58 выгрузки соединен с высоковакуумной камерой 51 iрабочей зоной), в которой размещен манипулятор 52, вьшолненный в виде направляющих 53 и 54, например шариковых, обеспечивающих горизонтальное перемещение предметного стола 55 манипулятора 52 во взаимно перпендикулярных плоскостях Направляющая 54 закреплена в камере 51 на осях 56 и 57, например винтовых, обеспечивающих вертикальное перемещение манипулятора 52. Камера
51содержит канал 58, соединяющий ее с магистралью откачки вакуума. На предметном столе 55 манипулятора
52закреплен дополнительный захват 59, содержащий корпус 60, на одной из продольных сторон 61 которого установлены неподвижные губки в виде роликов 62 и 63, а на другой стороне 64 - подпружиненные губки
в виде рЬликов 65 и 66. Перемещение роликов 65 и 66 под действием пружин 67 ограничено регулируемой шайбой 68. На поперечной стороне 69 корпуса 6р в направляющей 70 установлена подпружиненная опора 71, перемещение которой под действием пружины 72 ограничено головкой винта 73. На продольных сторонах 61 и 64 корпуса 60 на осях 74 и 75 установлены упорные поворотные подпружиненные собачки 76 и 77. Оси 74 и 75 охвачены торсионными пружинами 78 и 79; одни концы которых взаимодейсвуют с собачками 76 и 77, а другиес упорами 80 и 81, закрепленными в корпусе 60. Поворотсобачек 76 и 77 под действием пружин 78 и 79 ограничен регулируемыми упорами 82 и 83. .
Устройство работает следующим образом.
В исходном положении окно 48 выгрузки шлюза 2 герметично закрыто запорным органом 49 клапана 50. Для установки обоймы 31 снимают крышку 46, обойму 31 с объектами исследования, размещенными в карма не 32, устанавливают на транспортную платформу 1 и перемещают по ней в направлении клещевого захйаТа 7. Штырь 24 толкателя 19 входит в отверстие 34 в обойме 31. Фиксатор 35 входит в углубление 26 штыря 24. В таком положении обойма 31 зафиксирована относительно клещевого захвата 7 и транспортной платформы 1. После чего шлюз 2 закрывают крышкой 46 и производят его откачку через канал 47 до уровня вакуума в высоковауумной камере 51. Для открытия окна 48 выгрузки перемещают запорный орган 49 в направлении стрелки 1 привод клапана 50 не показан I. Для доставки-обоймы 31 из шлюза
2 в высоковакуумную камеру 51
(рабочую зону ) перемещают транспортную платформу 1 привод не показан), которая, работая но принципу выдвижной, лестницы, выдвигается через
5 окно 48 выгрузки в направлении
дополнительного захвата 59, предварительно с ориентированного относительно обоймы 31 манипулятором 52.. Обойма 31, перемещения транспортной
Q платформой 1, воздействует на собачки 76 и 77 дополнительного захвата 59. Собачки 76 и 77 поворачиваются вокруг своих осей 74 и 75 и в направляющие 38 и 39 обоймы 31 после5 довательно входят ролики 63,66 и 62, 65. Заходные конусы 40 и 41 в направляющих 38 и 39 обоймы 31 и подвижность роликов 66 и 65 дополнительного захвата в направлении, поперечном обойме 31, обеспечивают ее самоустановку на роликах 63, 66 и 62, 65 дополнительного захвата 59. При дальнейшем перемещении обойма 31 упирается в опору 71 и перемещает ее, взводя пружину 72. Собачки
76 и 77 после прохождения мимо них обоймы 31 попорачиваются вокруг осей 74 и 75 под действием пружин 78 и 79 и, упираясь в упоры 82 и 83, занимают исходное положение.После чего транспортная платформа 1 , начинает перемещаться в шлюз 2. Обойма 31 упирается в собачки 76, и 77, штырь 24, выталкивая фиксатор 35 из углубления 26, выходит из
5 отверстия 34 в обойме 31, которая остается в высоковакуумной камере 5. За счет сраба гывания пружин 67 и 72 происходит самоустановка обоймы 31 на строго ориентированной
0 позиции в дополнительном захвате 59. При дальнейшем перемещении транспортная платформа 1 вместе с клещевым захватом 7 возвращается в шлюз 2 в исходное положение. После чего,
5 перемещая запорный орган 49 в направлении против стрелки, перекрывают окно 48 выгрузки. В этом положении обойма 31 с объектами исследования находится в высоковакуумной камере 51, изолированной от шлюз 2 Для возвращения обоймы 31 с объектами исследования из высоковакуумной камеры 51, в шлюз 2 производят откачку шлюза 2 через канал 47 до уровня вакуума в высоковакуумной камере 51. Перемещая запорный орган 49 в направлении стрелки, открывают окно 48 выгрузки. Перемещают транспортную платформу 1, которая выдвигается через окно 48 выгрузки в направлении дополнительного захвата 59, предварительно с ориентированного относительно транспортной платформы 1 манипулятором 52. Транс портная платформа 1 проходит под обоймой 31, штырь 24 входит в отверстие 34 в обойме 31. Фиксатор 35 входит в углубление 26 штыря 24, а толкатель 19 клещевого захва та 7 упирается в поперечную сторон 33 обоймы 31. При дальнейшем перемещении транспортной платформы 1 начинает перемещаться обойма 31, воздействуя на опору 71, которая упирается в опорную площадку 84. Обойма 31 останавливается и, возде ствуя на толкатель 19 при продолжающемся перемещении платформы 1, перемещает его в на правлении траве сы 8, взводя пружину 20. При этом рычаги 13 и 14 перемеп1ающегося клещевого захвата 7 поворачивают собачки 76 и 77 дополнительного захвата -59. Обойма 31 освобождается от дейс вия собачек 76 и 77 дополнительног захвата, а выступы 15 и 16 клещево го захвата выходят из проушин 22 и 23 и под действием пружин 17 и 18 входят в пазы 44 и 45 зацепов 42 и 43. В таком положении обойма 31 захвачена клещевым захва том 7 и готова к выведению из высо ковакуумной камеры 51. После этого транспортная платформа 1 начинает перемещаться в шлюз 2. Обоймы 31 выходит из дополнительного захвата 59. При этом после отхода рычагов 13 и 14 клещевого захвата 7 собачки 76 и 77 дополнительного захвата 59 своими поверхностями 85 и 86 опускаются на продольные стороны 36 и 37 обоймы 31 и, касаясь их, не препятствуют выведению обоймы 31. После прохождения обоймы 31 мимо собачек 76 и 77, они под действием пружин 78 и 79 поворачиваются вокруг осей 74 и 75 и, упираясь в упоры 82 и 83, занимают исходное положение. Опора 71 и ролики 65 и 66 за счет срабатывания пружин 72 и 67 занимают исходное положение. Таким образом, дополнительный захват 59 самопроизвольно приведен в исходное положение. При дальнейшем перемещении платформа 1 вместе с захваченной клещевым захватом 7 обоймой 31 возвращается в шлюз 2. Пальцы 27 и 28 упираются в упоры 29 и 30. Рычаги 13 и 14 поворачиваются вокруг осей 11 и 12 и их выступы 15 и 16 выходят из пазов 44 и 45 зацепов 42 и 435 а пружина 20, воздействуя на толкатель 19, отстреливает обойму 31 в исходное положение. После чего перемещение транспортной платформы 1 прекращается. Таким образом клещевой захват 7 и обойма 31 самопроизвольно приведены в исходное положение. Посла этого, перемещая запорный орган 49 в направлении против С7релки, перекрывают окно 48 выгрузки. Устройство приведено в исходное положение. Предлагаемое устройство позволяет автоматизировать технологический процесс при манипулировании объектами, в рабочей зоне с высоким вакуумом,а также снизить энергозатраты на вакуумирование рабочей зоны.
Фиг. 5

| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированный комплекс для штамповки крупногабаритных деталей | 1985 |
|
SU1324725A1 |
| Автомат для сборки | 1987 |
|
SU1428561A2 |
| Гибкий производственный модуль для листовой штамповки | 1988 |
|
SU1667994A1 |
| Клещевая подача к горячештамповочному прессу | 1989 |
|
SU1639846A1 |
| Устройство для изготовления проволочных штырей и запрессовки их в изделие | 1988 |
|
SU1593879A2 |
| Автоматическая сборочная линия | 1985 |
|
SU1296350A1 |
| Установка для армирования керамических изделий | 1982 |
|
SU1057291A1 |
| Устройство для сборки керамических пластинчатых конденсаторов с однонаправленными выводами | 1989 |
|
SU1653015A1 |
| Устройство для выдачи билета и сдачи | 1979 |
|
SU868800A1 |
| Устройство для выгрузки радиодеталей из групповых кассет с канавками | 1990 |
|
SU1781857A1 |

1, УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕ ОБЪЕКТОВ В РАБОЧУЮ ЗОНУ, содержащее основание и транспортную платформу со схватом, имеющим двуплечие рычаги, отличающеес я тем, что, с целью расширения технологических возможностей, оно снабжено смонтированными на основании упорами, обоймой с фиксатором, а также установленным в рабочей зоне дополнительным захватом, выпол ненным в виде корпуса с размещенными на нем губками и подпружиненными относительно корпуса опорой и собач J ками, причем в схват дополнительно введен подпружиненный относительно него толкатель со штырем, на конце которого выполнено углубление под фиксатор, а двуплечие рычаги снабжены выступами, кроме того, в обойме выполнены отверстия под штырь, зацепы и направляющие пазы под губки дополнительного захвата, при этом обойма размещена на транспортной платформе с возможностью ее перемещения и взаимодействия с собачками и упором дополнительного захвата и толкателем схвата, а каждый из двуплечих рычагов последнего установлен с возможностью его взаимодействия одним плечом с собачками, а выступом этого плеча - с зацепом обоймы, а другим плечом - с упором основания, . 2. Устройство по п, 1, о т л ичающееся тем, что губки дополнительного захвата выполнены в виде роликов, одна пара которых жестко закреплена на корпусе, а другая подпружинена относительно него. - i ,7 г
| , Авторское свидетельство ССС № 571330, кл, В 25 J 11/00, 1976 (прототип), |
