Изобретение относится к системам автоматического управления и может быть использовано для автоматического регулирования промышленных, в частности нефтеперерабатывающих и нефтехимических объектов с существенными нелинейными характеристиками, функционирующими в условиях неопределенности. Причем характер неопределенности связан как с отсутствием необходимой информации, со сложностью структуры объекта, так и с трудностью формализации факторов, действующих на качество работы системы.
При исходном нечетком описании объекта
x(f) f(x(t), yCt),),
где x(t) - вектор состояния (управляемый выход объекта)5 Э - вектор параметров объекта, значения которы являются размытыми величинами; у.(t) управляющее воздействие, требуемое качество работы системы регулирования обеспечивается применением регулятора с размытой логикой.
Цель изобретения - повышение точности и устойчивости, улучшающее качество переходного процесса регулирования объектов, работающих в условиях неопределенности размытого характера.
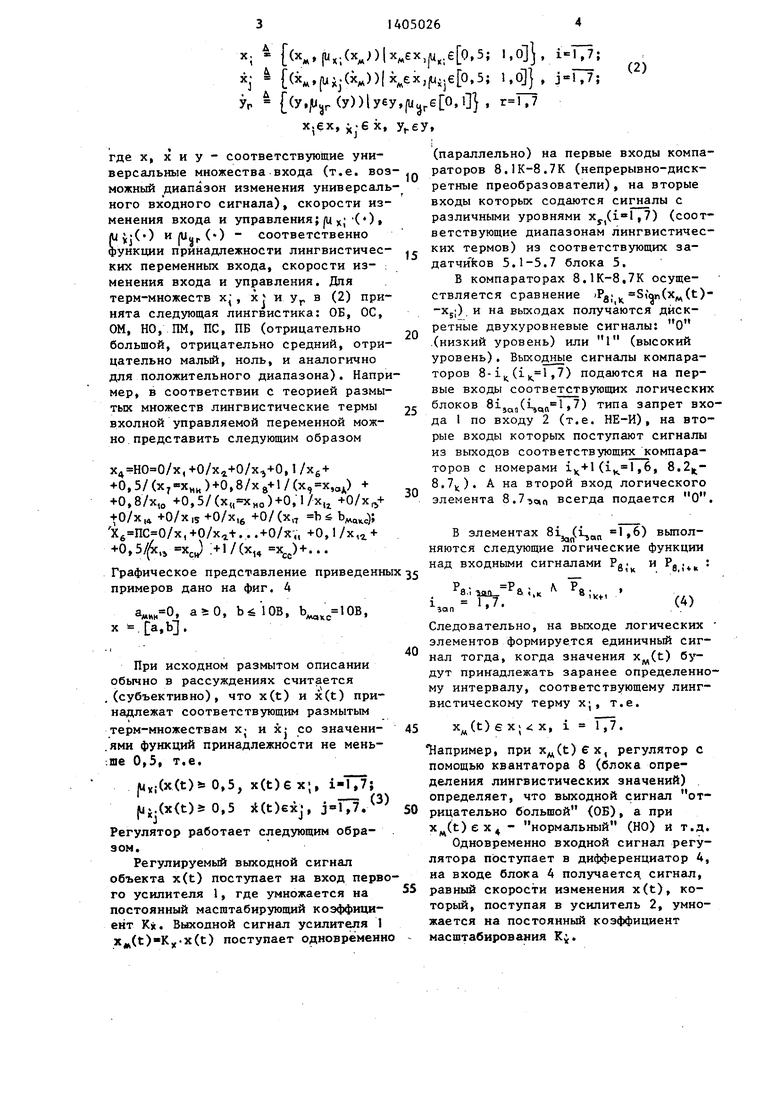
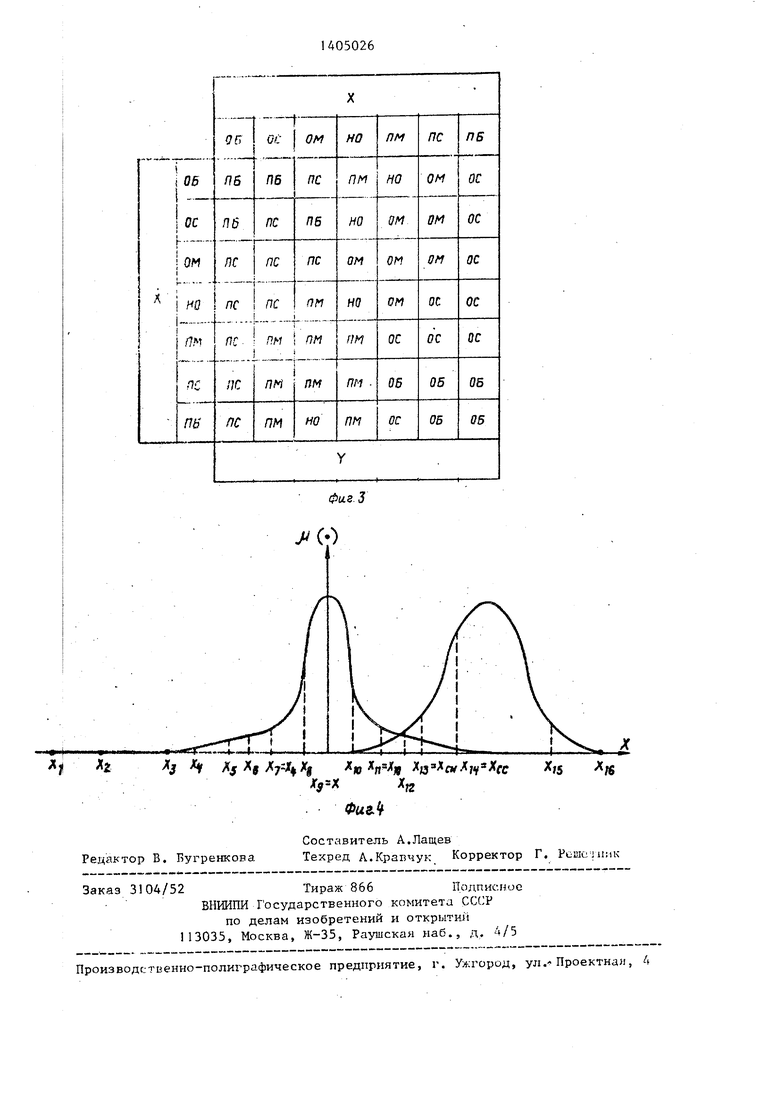
На фиг. 1 изображена обобщенная функциональная схема регулятора; на фиг. 2 - детальная (подробная) функ ционашьная схема регулятора; на фиг. 3 - таблица лингвистических правил регулятора; на фиг. 4 - функция принадлежности лингвистических термов регулятора.
Регулятор содержит усилители 1-3 дифференциатор 4, блоки 5 задатчико ошибки - диапазонов лингвистических термов входного сигнала регулятора (состоящее из отдельных задатчиков с 1-г6 по 7-й), блоки 6 задатчиков скорости изменения входного сигнала регулятора (состоящие из отдельных задатчиков с 1-го по 7-й), блок 7 задатчиков управления (состоящий из отдельных задстчиков с 1-го по 7-й), блока квантования ошибки - блока определения лингвистических значений входного сигнала регулятора (состоящий из компараторов, непр рьшно-дискретных преобразователей 8.1К-8.7К и логических элементов ти0
5
0
5
0
5
0
5
па запрет входа по входу 8.1зап - 8.7зап), блок 9 квантования скорости - блок определения лингвистических значений скорости изменения вход кого сигнала регулятора (состоящий из компараторов 9.IK-9.7K и логических элементов типа запрет 9.1зап- 9.7зап), блока 10 управляемых ключей (также фиксирующих заданные соответствия между входными и выходными переменными регулятора и состоящий из ключей с двумя входами 10.1- 10.49), блок 11 элементов И (состоящий, из 11.1-11.49 отдельных логических элементов И) и фильтр 12. Регулятор реализует следующий размытый логический закон управления, который описывается в виде таблицы лингвистических правил регулирования (фиг. 3). Таблица составлена на основе высказываний в виде размытых лингвистических правил регулирования: Если вход регулятора положительно большой () и скорость изменения входа положительно малая (), тогда выход регулятора отрица тельно средний (), иначе,
Если вход регулятора отрицательно малый () и скорость изменения входа отрицательно больщая (),, тогда выход регулятора положительно средний. (), где х;, xj и у,(, , 3 Г7п2, , п,, ,х кп ) - соответствующие лингвистические значения (терм-множества) входного сигнала регулятора x(t) (регулируемая переменная), скорости изменения входа x(t) и выхода регулятора (управления) y(t). Причем каждое лингвистическое правило регулирования в (1) определяет размытое отношение, т.е.
RK
J
УГ
,п,,, ,п,, .п, ,N ( n).
Согласно теории размытых множеств выражение (1) в компактном виде опи- сьгоается в следующем виде
y)UR,
N
и X.
R(x, X, y), Xj у. (la) В (1) терм-множества лингвистических переменных формируются в соответствии с оператором размытия (т.е. квантования) соответствующих переменных
; )UMex |U«;e 5 I,, i (xM.Uij(xM))(,|L,,5; l..
УР (y.tjr (y))ly€y,,, 

| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор с размытой логикой | 1988 |
|
SU1587466A1 |
| Устройство с размытой логической самоорганизацией для автоматического управления объектом,например ректификационной колонной | 1986 |
|
SU1434402A1 |
| Регулятор с переменной структурой | 1978 |
|
SU736046A1 |
| Квазиинвариантный финитный регулятор с переменной структурой | 1986 |
|
SU1385123A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ТЕМПЕРАТУРЫ ПАРА КОТЛОАГРЕГАТА | 1999 |
|
RU2151342C1 |
| Адаптивный регулятор с регулируемой обратной связью | 1985 |
|
SU1287104A1 |
| Система управления с переменной структурой | 1984 |
|
SU1171754A1 |
| Адаптивный регулятор | 1984 |
|
SU1228073A1 |
| Пневматический адаптивный регулятор с переменной структурой | 1983 |
|
SU1285429A1 |
| Адаптивная система управления для объектов с изменяющимся запаздыванием | 1986 |
|
SU1383292A1 |

Изобретение относится к системам .автоматического управления и может быть использовано для автоматического регулирования промышленных, в частности нефтеперерабатьшающих, объектов с существенными нелинейными характеристиками, функционирующими в условиях неопределенности. Причем характер неопределенности связан как с отсутствием необходимой информации, со сложностью структуры объекта, так и с трудностью формализации факторов, действующих на качество работы системы. С целью повышения устойчивости и точности процесса регулирования, регулятор содержит перестраиваемые квантаторы, блок 11 управляющих ключей, блок 10 логического вьшода, фильтр 12, блоки задания 5 и 7. 4 ил. S (Л 4 о ел о ю 05
x.ex, xj6x, .
где X, X и у - соответствующие универсальные множества входа (т.е. воз можный диапазон изменения универсального входного сигнала), скорости изменения входа и управления;/ц х; () f (() илЛирС) - соответственно функции принадлежности лингвистических переменных входа, скорости из- ; менения входа и управления. Для терм-множеств х , х и у,, в (2) принята следующая лингвистика: ОБ, ОС, ОМ, НО, ПМ, ПС, ПБ (отрицательно большой, отрицательно средний, отрицательно малый, ноль, и аналогично для положительного диапазона). Например, в соответствии с теорией размытых множеств лингвистические термы вхолной управляемой переменной можно .представить следующим образом
30
,,+0,1/Xg+
+ 0,5/(,8/Х8-И/(х,Х,аР +
+0,8/х,о +0,5/()+0,1/х, +0/Х, +0/х,5 -t-0/x,6 +0/(х„ Ьб ,); , +0/x-it.. .+0/XV, +0,1 /х,г + -Ю,5/(„ xj 1/(х„ х,) + ...
Графическое представление приведенных 35 примеров дано на фиг. 4
а«,,0, asO, , , X .а,ЬЗ.
При исходном размытом описании обычно в рассуждениях считается
.(субъективно), что x(t) и x(t) принадлежат соответствующим размытым терм-множествам х- и х: со значени.ями функций принадлежности не мень.ше 0,5, т.е.
jUxi(x(t)fe 0,5, x(t)6x;, jm.()sO,5 ;l(t)exj, j l77.
Регулятор работает следующим образом.
Регулируемый выходной сигнал объекта x(t) поступает на вход первого усилителя 1, где умножается на постоянный масштабирующий коэффициент Кх. Выходной сигнал усилителя 1 x,n(t)-K.x(t) поступает одновременно
(параллельно) на первые входы компараторов 8,1К-8.7К (непрерывно-дискретные преобразователи), на вторые входы которьж содаются сигналы с различными уровнями Xj.(,7) (соответствующие диапазонам лингвистических термов) из соответствующих за- дaтчи koв 5.1-5.7 блока 5.
В компараторах 8.1К-8,7К осуществляется сравнение S(Qn(x(t)- -Xji) и на выходах получаются дискретные двухуровневые сигналы: О .(низкий уровень) или I (высокий уровень). Выходные сигналы компараторов 8-i| (,7) подаются на первые входы соответствующих логических блоков 8ijjj,,( ,7) типа запрет входа 1 по входу 2 (т.е. НЕ-И), на вторые входы которых поступают сигналы из выходов соответствующих компара- торов с номерами 1,+1(,6, 8.2ц- 8,7)). А на второй вход логического элемента 8., всегда подается О.
В элементах 81 (ц, 1,6) выполняются следующие логические функции над входными сигналами Pg. и Pj . :
л Р
8;
k+1
(А)
Следовательно, на вькоде логических элементов формируется единичный сигнал тогда, когда значения Xj(t) будут принадлежать заранее определенному интервалу, соответствующему лингвистическому терму X;, т.е.
x(t) е X; с X, 1 1,7.
Например, при x(t)ex, регулятор с помощью квантатора 8 (блока определения лингвистических значений) определяет, что выходной сигнал отрицательно большой (ОБ), а при
x(t)6X4 - нормальный (НО) и т.д. Одновременно входной сигнал регулятора поступает в дифференциатор 4, на входе блока 4 получаете сигнал,
равный скорости изменения x(t), который, поступая в усилитель 2, умножается на постоянный коэффициент масштабирования К.
Затем выходной сигнал второго усилителя X (t), соответствующий реальному масштабированному значению скорости изменения входного (управляемого) сигнала, поступает на вход блока 9, Аналогично работе первого квантатора (блок 8) в блоке 9 с участием блока 6 определяется лингвистический терм (значение) скорости изменения входного управляемого т.е.
сигнала,
i
(t), j l,7.
- „ . . „. ,с изменение ошибки регулирования к ну- Блок 9 (как и блок 8) имеет 7 вы- Ь ,,,п. „оо„„„.„, „.
лю, что способствует увеличению усХОДОВ, в которых могут быть дискретные сигналы - О
ствующие лингвистическим терм-множествам XJ , (j l,7):
, (,
9jWn P9J 4f J
Ь7)- Выходные сигналы блоков 8 и 9 поступают на соответствующие входы
лю, что способствует увеличению усили 1,
соответ-
20
тойчивости по сравнению с известным регулятором. При средних отклонениях управляемой переменной объекта от , задания (как по скорости изменения, так и по ошибке) регулятор в соответствии с предложенной логикой настроен так, чтобы значение управления изменялось бы больше, и тем самым увеблока 10 логического вывода, состоя- 25 ичилось бы быстродействие системы щего из 1. 11-49.11 элементов И и клю- (.е. ошибка быстро стремится к нулю) . чей 1.10-49.10. В логических устроит ° Я очень больших :отклонений выхо- ствах 11 и 10 осуществляется жесткая яа, управляющее воздействие изменя- |)иксация отношения R(x,x,y), (,49) мало по отношению к среднему, чежду лингвистическими переменными зо самым уменьшается скорость изменения выхода и колебания (перерегулирование) объекта, чем обеспечивается устойчивость САУ при существенных возмущениях. Предлагаемьй регулятор вырабатывает непрерьгоный сглажен- 35 ный (аналоговьй) управляющий сигнал по сравнению с известным регулятором, который вырабатывает дискретно-сту- пенчатый сигнал, и тем самым продлевается срок службы исполнительных механизмов. Формула
х|, XJ, Ур(1, J, ,7) в соответствии с ТЛИ (la) и композиционный вывод, из размытого отношения R по теку- цим лингвистическим значениям от входных переменных, т.е.
Ур x;o(xjoR(x, X , у)), ,
1ричем лингвистические значения Ур(,7) подаются от соответствую 1ЭЩИХ задатчиков 7.1-7,7 блока 7. I Фиксация отношения осуществляется , что входы (сигнальные) ключей, (стоящие на пересечении i-й строки и J-ro столбца, жестко соединены с . йадатчиком соответствующего уровня через шины подключения.
Выходные сигналы всех ключей 10.1-10.49, суммируясь на выходной оЫнии, подаются на вход фильтра 12, Jhдe сглаживается входной ступенча- Гый дискретный сигнал. При любом Состоянии выходных сигналов кванта- ; . торов 8 и 9 только на одном выходе С5лока логического вывода 11.1-11.49- г станавливается высокий уровень 1. Следовательно, при ,к равном 1, «оответствующее управление из блока 7 поступает через ключ на вход сгла- яЬивающего фильтра. На выходе фильтра
40
45
50
изобретения
Регулятор с размытой логикой, содержащий первый усилитель, вход которого соединен с входом регулятора и через второй усилитель - с входом дифференциатора, и последовательно соединенные фильтр и третий усили- . тель, являющийся выходом регулятора.
отличающийся тем, что, с целью повышения устойчивости и точности регулятора, он содержит блок задатчиков ошибки, блок задатчиков скорости, блик квантования ошибки, 55 блок квантования скорости, блок задатчиков управления, блоки элементов И и блоки управляемЬк ключей, выходы кдторых соединены с входом
405026 6
12 формируется аналоговый управляю- щий сигнал. Последний поступает на вход третьего усилителя, где умножаясь на постоянный масштабирующий коэффициент, формируется выходной сигнал регулятора.
Предложенный регулятор настраивается с помощью задатчиков 5.1-5.7 и 6.1-6.7 таким образом, чтобы при малых отклонениях выходной (управляемый) переменной объекта от задания, значения управления изменялись мало. Последнее обеспечивает в САУ плавное
10
изменение ошибки регулирования к ну- ,,,п. „оо„„„.„, „.
лю, что способствует увеличению устродействие системы тро стремится к нулю) . льших :отклонений выхо- воздействие изменя- ношению к среднему, ньшается скорость изи колебания (переобъекта, чем обеспеивость САУ при сущестиях. Предлагаемьй регуает непрерьгоный сглажен ) управляющий сигнал по естным регулятором, ывает дискретно-сту- , и тем самым продлужбы исполнительных
изобретения
45
50
Регулятор с размытой логикой, содержащий первый усилитель, вход которого соединен с входом регулятора и через второй усилитель - с входом дифференциатора, и последовательно соединенные фильтр и третий усили- . тель, являющийся выходом регулятора.
отличающийся тем, что, с целью повышения устойчивости и точности регулятора, он содержит блок задатчиков ошибки, блок задатчиков скорости, блик квантования ошибки, 55 блок квантования скорости, блок задатчиков управления, блоки элементов И и блоки управляемЬк ключей, выходы кдторых соединены с входом
7i
фильтра, выход дифференциатора подключен к входу блока квантования скорости, векторный вход которого соединен с выходом блока задатчиков скорости, а векторный выход - с векторным входом блоков элементов И, векторными выходами соединенных с первыми векторными входами соответствующих блоков ключей, вторые век050268
торные входы которых соединены с векторнь1м выходом.блока задатчиков управления, причем входы блоков элементов И соединены с соответствую щими выходами блока квантования
ошибки, входом подключенного к выходу первого усилителя, а векторным входом - к выходу блока задатчиков 1Q ошибки.
| Нефть и газ, Известия ВУЗов, 1985, № 8, с | |||
| Парный автоматический сцепной прибор для железнодорожных вагонов | 0 |
|
SU78A1 |
