6jL
ел
со со
ГС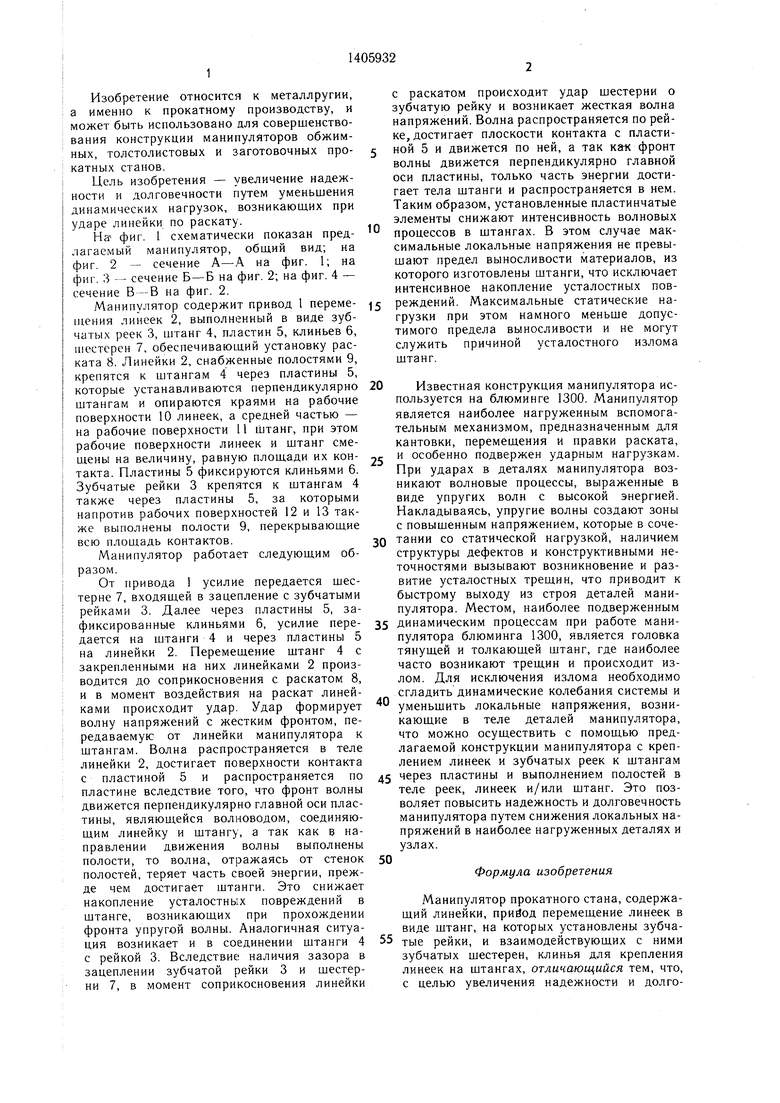
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор обжимного прокатного стана | 1986 |
|
SU1353546A2 |
| Манипулятор обжимного прокатногоСТАНА | 1979 |
|
SU804035A1 |
| Манипулятор обжимного прокатного стана | 1983 |
|
SU1189527A1 |
| Манипулятор обжимного прокатного стана | 1980 |
|
SU935149A1 |
| Манипулятор обжимного прокатного стана | 1987 |
|
SU1444006A1 |
| МАНИПУЛЯТОР ПРОКАТНОГО СТАНА | 2003 |
|
RU2254947C2 |
| Вкладыш шарнира скольжения универсального шпинделя | 1983 |
|
SU1091958A1 |
| Привод линейки манипулятора обжимного прокатного стана | 1983 |
|
SU1115824A1 |
| Манипулятор обжимного прокатного стана | 1991 |
|
SU1785452A3 |
| Манипулятор прокатного стана | 1978 |
|
SU719733A1 |
Изобретение относится к области металлургии, а точнее к прокатному производству, и может быть использовано для совершенствования конструкции манипуляторов обжимных, толстолистовых и заготовочных прокатных станов. Цель - увеличение надежности и долговечности за счет уменьшения динамических нагрузок, возникающих при ударе линейки по раскату. При перемеилении раската 8 линейками 2, соединенными с приводом через и танги 4 и зубчатые рейки 3, возникает динамический удар. Т. к. линейки 2 и штанги 4 закреплены с помош.ью пластин 5, клиньев 6 и снабжены полостями, в момент соприкосновения раската с линейкой только часть энергии удара достигает тела штанги и распространяется в ней и приводе. Это снижает накопление усталостных трешин и повреждений в штанге. 4 ил. Ш сл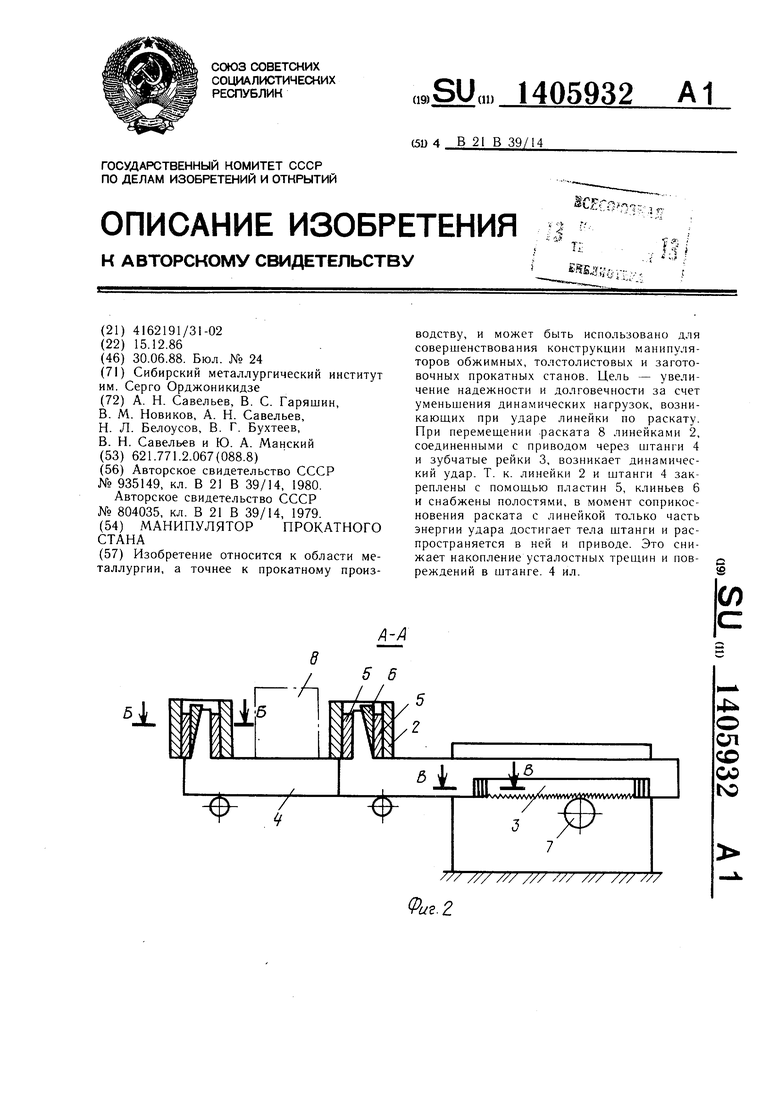
/// /// /// /// /// /// /// ///
(Ри.2.
Изобретение относится к металлругии, а именно к прокатному производству, и может быть использовано для совершенствования конструкции манипуляторов обжимных, толстолистовых и заготовочных прокатных станов.
Цель изобретения - увеличение надежности и долговечности путем уменьшения динамических нагрузок, возникаюш,их при ударе линейки по раскату.
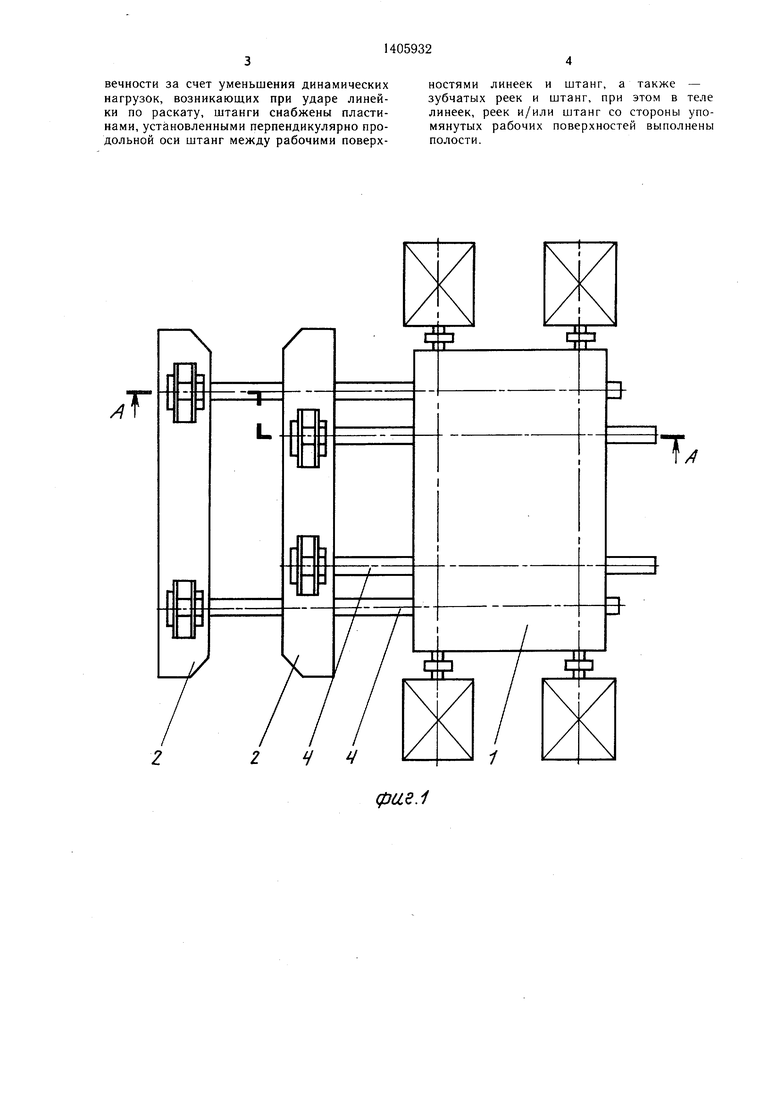
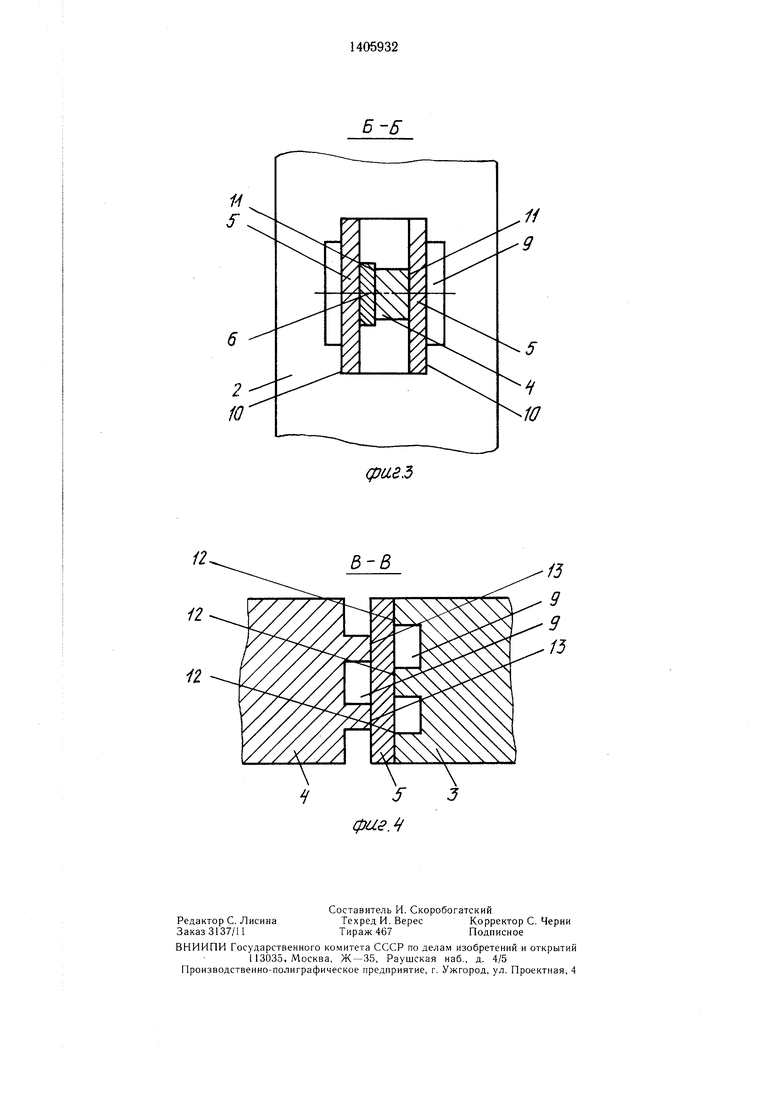
На фиг. 1 схематически показан предлагаемый манипулятор, обш,ий вид; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - сечение Б-Б на фиг. 2; на фиг. 4 - сечение В -В на фиг. 2.
Манипулятор содержит привод 1 перемещения линеек 2, выполненный в виде зубчатых реек 3, штанг 4, пластин 5, клиньев 6, шестерен 7, обеспечивающий установку раската 8. Линейки 2, снабженные полостями 9, крепятся к штангам 4 через пластины 5, которые устанавливаются перпендикулярно штангам и опираются краями на рабочие поверхности 10 линеек, а средней частью - на рабочие поверхности 11 штанг, при этом рабочие поверхности линеек и штанг сме- ш.ены на величину, равную плош.ади их контакта. Пластины 5 фиксируются клиньями 6. Зубчатые рейки 3 крепятся к штангам 4 также через пластины 5, за которыми напротив рабочих поверхностей 12 и 13 также выполнены полости 9, перекрываюшие всю плошадь контактов.
Манипулятор работает следуюш.им образом.
От привода 1 усилие передается шестерне 7, входяш,ей в зацепление с зубчатыми рейками 3. Далее через пластины 5, зафиксированные клиньями 6, усилие передается на штанги 4 и через пластины 5 на линейки 2. Перемещение штанг 4 с закрепленными на них линейками 2 производится до соприкосновения с раскатом 8, и в момент воздействия на раскат линейками происходит удар. Удар формирует волну напряжений с жестким фронтом, передаваемую от линейки манипулятора к штангам. Волна распространяется в теле линейки 2, достигает поверхности контакта с пластиной 5 и распространяется по пластине вследствие того, что фронт волны движется перпендикулярно главной оси пластины, являющейся волноводом, соединяющим линейку и штангу, а так как 5 направлении движения волны выполнены полости, то волна, отражаясь от стенок полостей, теряет часть своей энергии, прежде чем достигает штанги. Это снижает накопление усталостных повреждений в штанге, возникающих при прохождении фронта упругой волны. Аналогичная ситуация возникает и в соединении штанги 4 с рейкой 3. Вследствие наличия зазора в зацеплении зубчатой рейки 3 и шестерни 7, в момент соприкосновения линейки
с раскатом происходит удар шестерни о зубчатую рейку и возникает жесткая волна напряжений. Волна распространяется по рейке, достигает плоскости контакта с пластиной 5 и движется по ней, а так как фронт волны движется перпендикулярно главной оси пластины, только часть энергии достигает тела штанги и распространяется в нем. Таким образом, установленные пластинчатые элементы снижают интенсивность волновых
процессов в штангах. В этом случае максимальные локальные напряжения не превышают предел выносливости материалов, из которого изготовлены штанги, что исключает интенсивное накопление усталостных пов5 реждений. Максимальные статические нагрузки при этом намного меньше допустимого предела выносливости и не могут служить причиной усталостного излома штанг.
0 Известная конструкция манипулятора используется на блюминге 1300. Манипулятор является наиболее нагруженным вспомогательным механизмом, предназначенным для кантовки, перемещения и правки раската,
5 и особенно подвержен ударным нагрузкам. При ударах в деталях манипулятора возникают волновые процессы, выраженные в виде упругих волн с высокой энергией. Накладываясь, упругие волны создают зоны с повышенным напряжением, которые в соче0 тании со статической нагрузкой, наличием структуры дефектов и конструктивными неточностями вызывают возникновение и развитие усталостных трещин, что приводит к быстрому выходу из строя деталей манипулятора. Местом, наиболее подверженным
5 динамическим процессам при работе манипулятора блюминга 1300, является головка тянущей и толкающей штанг, где наиболее часто возникают трещин и происходит излом. Для исключения излома необходимо сгладить динамические колебания системы и уменьшить локальные напряжения, возникающие в теле деталей манипулятора, что можно осуществить с помощью предлагаемой конструкции манипулятора с креплением линеек и зубчатых реек к штангам
5 через пластины и выполнением полостей в теле реек, линеек и/или штанг. Это позволяет повысить надежность и долговечность манипулятора путем снижения локальных напряжений в наиболее нагруженных деталях и узлах.
0
Формула изобретения
Манипулятор прокатного стана, содержащий линейки, прийод перемещение линеек в виде штанг, на которых установлены зубчатые рейки, и взаимодействующих с ними зубчатых шестерен, клинья для крепления линеек на штангах, отличающийся тем, что, с целью увеличения надежности и долговечности за счет уменьшения динамических нагрузок, возникающих при ударе лнней- ки по раскату, штанги снабжены пластинами, установленными перпендикулярно продольной оси штанг между рабочими поверхностями линеек и штанг, а также - зубчатых реек и штанг, при этом в теле линеек, реек и/или штанг со стороны упомянутых рабочих поверхностей выполнены полости.
фае.1
5-Б
фагъ
| Манипулятор обжимного прокатного стана | 1980 |
|
SU935149A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Манипулятор обжимного прокатногоСТАНА | 1979 |
|
SU804035A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
