54) ЭЛЕВАТОР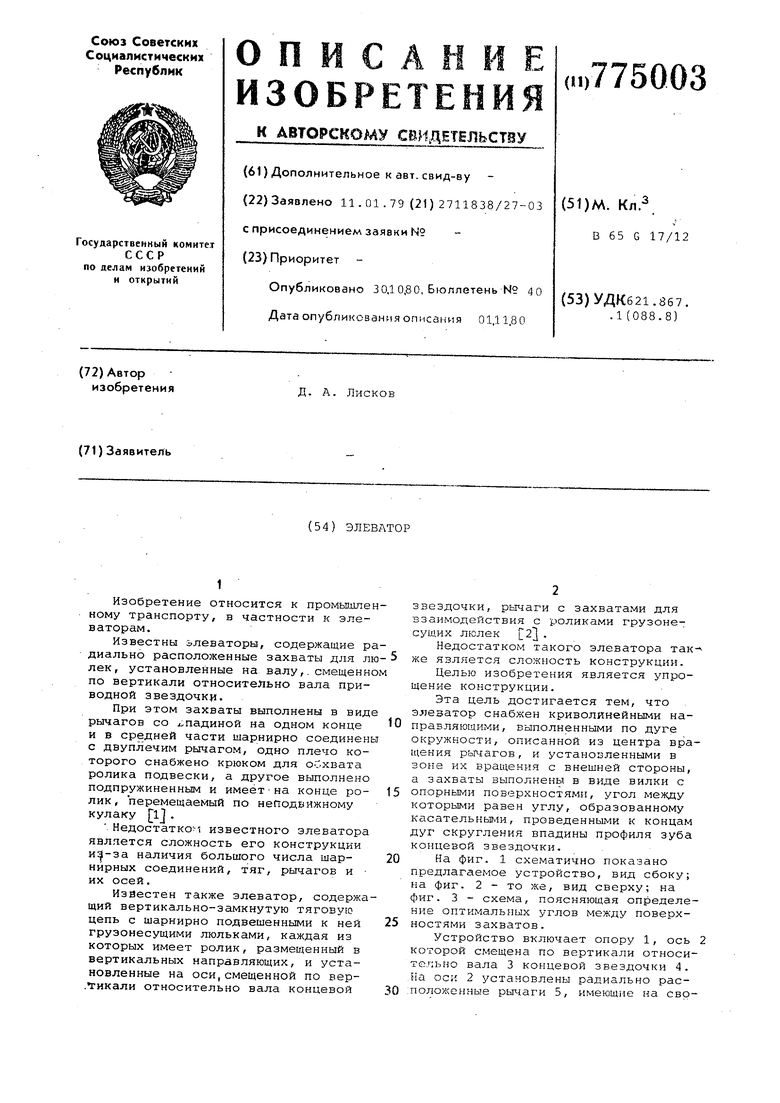
| название | год | авторы | номер документа |
|---|---|---|---|
| Люлечный элеватор | 1978 |
|
SU753724A1 |
| СУДОВОЙ ДВУСТОРОННИЙ ЛЮЛЕЧНЫЙ ЭЛЕВАТОР ДЛЯ ТРАНСНОРТИРОВКИ ШТУЧНЫХ ГРУЗОВ | 1973 |
|
SU372132A1 |
| Люлечный элеватор | 1986 |
|
SU1406082A1 |
| ПОЛОЧНЫЙ ЛЕНТОЧНЫЙ ЭЛЕВАТОР | 2009 |
|
RU2406672C1 |
| ЛЮЛЕЧНЫЙ ВЫСТУПООДНОЛЕНТОЧНЫЙ ЭЛЕВАТОР | 1994 |
|
RU2079425C1 |
| УСТРОЙСТВО для ПЕРЕГРУЗКИ ИЗДЕЛИЙ | 1965 |
|
SU174989A1 |
| МЕХАНИЗИРОВАННОЕ УСТРОЙСТВО ДЛЯ СКЛАДИРОВАНИЯ ИЗДЕЛИЙ | 2005 |
|
RU2324634C2 |
| Устройство для транспортировки и загрузки штучных грузов | 1988 |
|
SU1518242A1 |
| Линия для производства формового хлеба | 1980 |
|
SU938878A1 |
| Люлечный конвейер | 1982 |
|
SU1021643A1 |
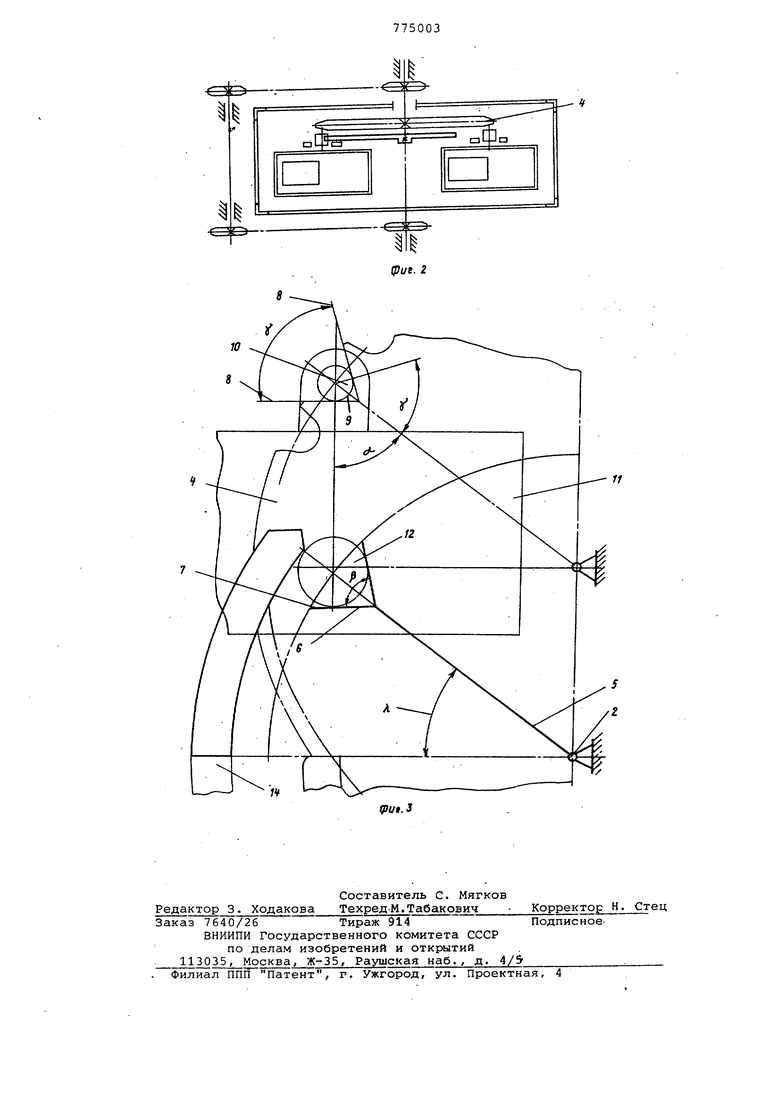
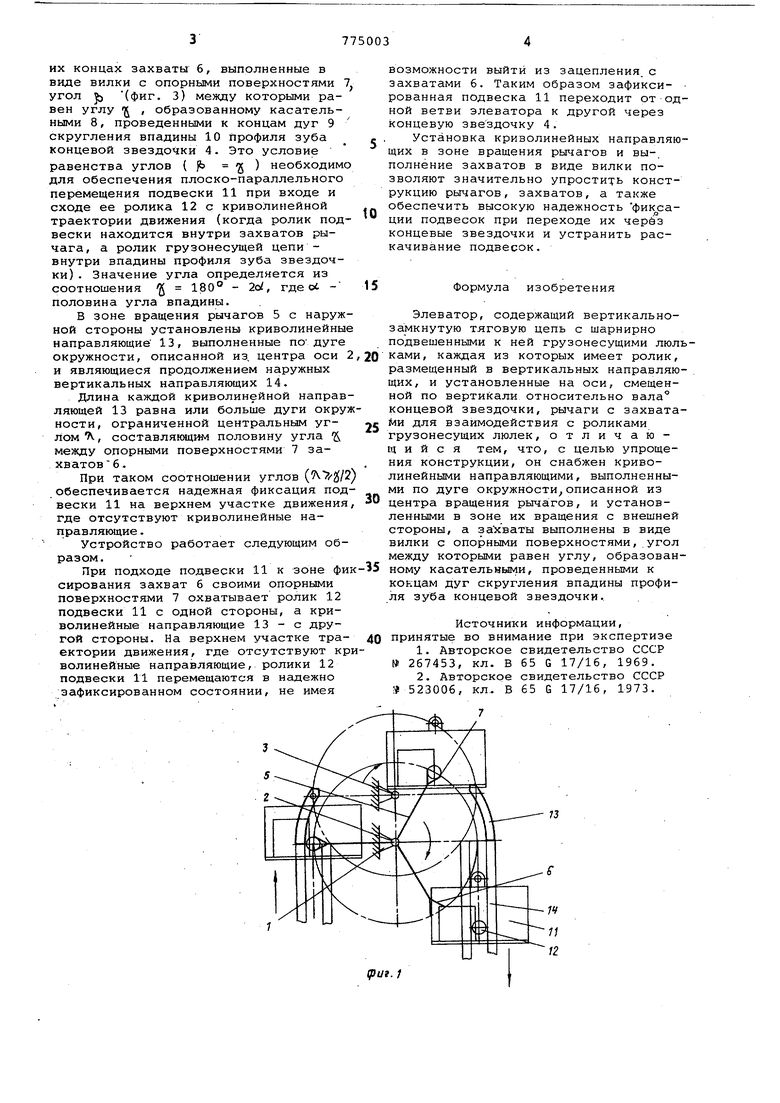
Изобретение относится к промияле ному транспорту, в частности к элеваторам. Известны элеваторы, содержащие р диально расположенные захваты для л лек, установленные на валу,, смещенн по вертикали относительно вала приводной звездочки. При этом захваты выполнены в вид рычагов со .падиной на одном конце и в средней части шарнирно соединен с двуплечим рычагом, одно плечо которого снабжено крюком для оСхвата ролика подвески, а другое выполнено подпружиненным и имеетна конце ро лик, перемещаемый по неподвижному кулаку 1J . Недостатко-i известного элеватор является сложность его конструкции наличия большого числа шарнирных соединений, тяг, рычагов и их осей. Известен также элеватор, содерж щий вертикально-замкнутую тяговую цепь с шарнирно подвешенными к ней грузонесущими люльками, каждая из которых имеет ролик, размещенный в вертикальных направляющих, и установленные на оси,смещенной по вер.Тикали относительно вала концевой звездочки, рычаги с захватами для взаимодействия с роликами грузонесущих люлек Недостатком такого элеватора также язл51ется сложность конструкции. Целью изобретения является упрощение конструкции. Эта цель достигается тем, что элеватор снабжен криволинейными направляющими, выполненными по дуге окружности, описанной из центра вращения рычагов, и установленными в зоне их вращения с внешней стороны, а захваты выполненьт в виде вилки с опорными поверхностями, угол между которыми равен углу, образованному касательными, проведенными к концам дуг округления впадины профиля зуба концевой звездочки. На фиг. 1 схематично показано предлагаемое устройство, вид сбоку; на фиг. 2 - то же, вид сверху; на фиг. 3 - схема, поясняющая определение оптимальных углов между поверхностями захватов. Устройство включает опору 1, ось 2 которой смещена по вертикали относительно вала 3 концевой звездочки 4. Па оси 2 установлены радиалько рас.положснные рычаги 5, имеющие на сврих концах захваты 6, выполненные в виде вилки с опорными поверхностями 7 угол j) (фиг. 3) между которыми равен углу f , образованному касательными 8, проведенными к концам дуг 9 скругления впадины 10 профиля зуба концевой звездочки 4. Это условие равенства углов ( )Ь 7$ необходимо для обеспечения плоско-параллельного перемещения подвески 11 при входе и сходе ее ролика 12 с криволинейной траектории движения (когда ролик под вески находится внутри захватов рычага, а ролик грузонесущей цепи внутри впадины профиля зуба звездочки) . Значение угла определяется из соотношения 1130° - 2ct, где oi половина угла впадины. В зоне вращения рычагов 5 с наруж ной стороны установлены криволинейны направляющие 13, выполненные по дуге окружности, описанной из. центра оси и являющиеся продолжением наружных вертикальных направляющих 14. Длина каждой криволинейной направ ляющей 13 равна или больше дуги окру ности, ограниченной центральньлм углом Л, составляющим половину угла J, между опорными поверхностями 7 захватов 6. При таком соотношении углов ( обеспечивается надежная фиксация под вески 11 на верхнем участке движения где отсутствуют криволинейные направлякнцие. Устройство работает следующим образом. При подходе подвески 11 к зоне фи сирования захват б своими опорными поверхностями 7 охватывает ролик 12 подвески 11 с одной стороны, а криволинейные направляющие 13 - с другой стороны. На верхнем участке траектории движения, где отсутствуют кр волинейные направляющие, ролики 12 подвески 11 перемещаются в надежно зафиксированном состоянии, не имея возможности выйти из зацепления, с захватами 6. Таким образом зафикси- рованная подвеска 11 переходит от одной ветви элеватора к другой через концевую звездочку 4 . Установка криволинейных направляющих в зоне вращения рычагов и вы-, полнение захватов в виде вилки позволяют значительно упростить конструкцию рычагов, захватов, а также обеспечить высокую надежность фиксации подвесок при переходе их черёз концевые звездочки и устранить раскачивание подвесок. Формула изобретения Элеватор, содержащий вертикальнозамкнутую тяговую цепь с шарнирно подвешенными к ней грузонесущими люльками, каждая из которых имеет ролик, размещенный в вертикальных направляющих, и установленные на оси, смещенной по вертикали относительно вала° концевой звездочки, рычаги с захватаМи для взаимодействия с роликами грузонесущих люлек, отличающийся тем, что, с целью упрощения конструкции, он снабжен криволинейными направляющими, выполненными по дуге окружности описанной из центра вращения , и установленными в зоне их вращения с внешней стороны, а захваты выполнены в виде вилки с опорными поверхностями, угол между которыми равен углу, образованному касательными, проведенными к концам дуг скругления впадины профиля зуба концевой звездочки. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 267453, кл. В 65 G 17/16, 1969. 2.Авторское свидетельство СССР ; 523006, кл.. В 65 G 17/16, 1973.
Ю
