4 00 4 ND
I Изобретение относится к кривошипно- |ползунным преобразователям вращательного |движения в возвратно-поступательное и на- ;оборот и может найти применение в манипуляторах, накопителях, полиграфических :машинах.
: Цель изобретения - расширение кине- :матических возможностей механизма за счет ;обеспечения возможности остановки выход- |ных звеньев и связанных с ними масс исполнительных органов в конечных фазах движения.
На чертеже показана кинематическая :схема механизма.
i Механизм содержит основание 1 с прямолинейной направляющей 2 и кривошип в виде двуплечего рычага с плечами 3 и 4 разной длины. Длинное плечо 4 имеет возможность независимого поворота вокруг оси кривошипа, а на коротком плече 3 закреплены упоры 5 и 6, ограничивающие поворот плеча 4, взаимодействуя с его боковыми сторонами. Угол между плечами 3 и 4 отличен от 180°.
В направляющей 2 установлены ползуны 7 и 8, через шатуны 9 и 10 щарнирно связанные соответственно с плечами 3 и 4 кривошипа. С ползунами 7 и 8 жестко связаны массы 11 и 12 в виде, например, исполнительных органов или перемещаемых грузов. Массы всех звеньев механизма суше- I ственно меньше масс 11 и 12. Механизм работает следующим образом. В положении механизма, соответствующем положению шарниров А, Bi, Ci, D, происходит безударное соединение движущейся массы 11 и массы 12 за счет равенства нулю передаточной функции между этими массами. При движении ползуна 7 в направлении, указанном стрелкой, упор 6 приводит в движение кривошипно-ползунный механизм ОАВ. При этом скорость массы 12 возрастает, а массы 11 - убывает, достигая нулевого значения в точке D-2, когда передаточная функция равна бесконечности. В этот момент ползун 8 оказывается в точке В2 и имеет максимальную скорость, т. е. происходит рекуперативный обмен энергией между массами II и 12. Плечо 4 кривощипа, приводимое в движение массой 12, продолжает вращение относительно остановившегося плеча 3 кривошипа и поворачивается на заданный упорами 5 и 6 угол до встречи в положении А 2 с упором 5, а ползун 8 перемещается в точку В. При этом происходит безударное соединение движущейся массы 12 и неподвижной массы 11 после выстоя массы 11 в положении D-2 (Dz). Под действием массы 12 происходит ее перемещение из положения B z в
положение Вз и остановка, ползун 7 перемещается в точку Оз и получает скорость, противоположную первоначальной. Плечи 4 и 3 кривошипа оказываются в положении АЗ и Сз. В этом положении останавливается плечо 4 кривошипа и прекращает
контакт с упором 5, а плечо 3 кривошипа поворачивается относительно него в положение Сз на ограниченный упорами угол до. контакта упора 6 с плечом 4 кривошипа. При этом происходит высотой ползуна 8 в
положении Вз (Вз) и перемещение ползуна 7, шатуна 9 и плеча 3 кривошипа в положение Da, Сз . Дальнейшее движение аналогично: в положении D (О ) - вы стой ползуна 7 и перемещение 84 ползуна 8, в положении Въ (Bi) -
выстой ползуна 8 и перемещение Ds-D ползуна 7, после чего система возвращается в исходное положение.
Таким образом, обеспечивается рекуперативное возвратно-поступательное движение масс 11 и 12 с выстоями их в крайних положениях при отсутствии ударов. Использование изобретения позволяет обеспечить высокоскоростное возвратно- поступательное движение масс, не требую- использования мощного привода при
автоматическом обеспечении выстоя.
Формула изобретения
Кривошипно-ползунный механизм с остановками, содержащий основание с прямолинейной направляющей, установленный на основании кривошип в виде двуплечего углового рычага с плечами разной длины, ось вращения которого пересечена с продольной осью направляющей, два ползуна, установленные в направляющей по обе стороны кривошипа, и два шатуна, и арнирно связывающие плечи кривошипа с соответствующими ползунами, отличающийся тем, что, с целью расширения кинематических возможностей, угловой рычаг выполнен разъемным,
длинное его плечо установлено на его оси с возможностью поворота, а механизм снабжен двумя упорами, закрепленными на коротком плече и предназначенными для периодического взаимодействия с соответствующими боковыми поверхностями длинного
плеча.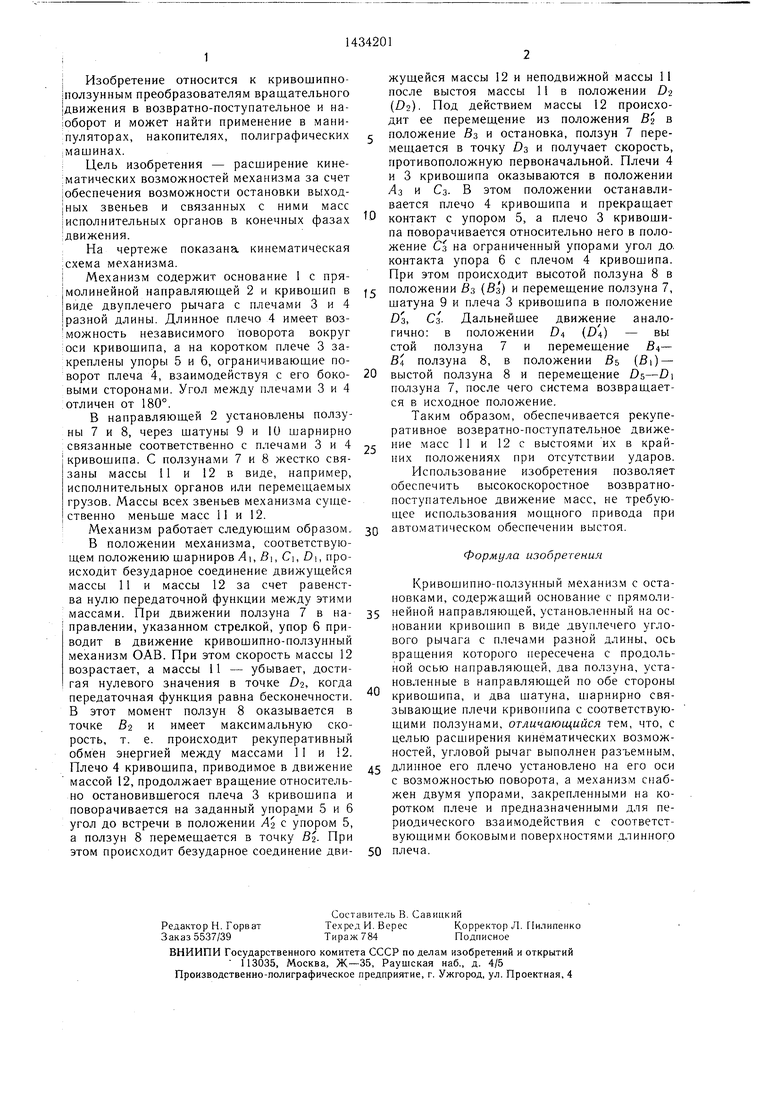
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1987 |
|
SU1407790A1 |
| Демпфер | 1987 |
|
SU1420265A1 |
| КРИВОШИПНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМИ ОСТАНОВКАМИ | 2005 |
|
RU2283446C1 |
| РЫЧАЖНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМ ДЛИТЕЛЬНЫМ ВЫСТОЕМ | 2023 |
|
RU2836248C1 |
| Привод наружного ползуна кривошипного пресса двойного действия | 1979 |
|
SU872291A2 |
| Кривошипно-ползунный механизм с точным выстоем ползуна | 1989 |
|
SU1679092A1 |
| Рекуператор механической энергии | 1987 |
|
SU1446398A1 |
| Механизм привода нижней плиты печатно-позолотного пресса | 1984 |
|
SU1279862A1 |
| МЕХАНИЗМ ТРАНСПОРТИРОВАНИЯ ТКАНИ ШВЕЙНОЙ МАШИНЫ (ВАРИАНТЫ) | 2004 |
|
RU2284384C2 |
| Привод нижней плиты печатно-позолотного пресса | 1986 |
|
SU1391956A1 |
Изобретение относится к кривошипно- ползунным механизмам с рекуперацией механической энергии движущихся масс. Цель изобретения - расширение кинематических возможностей механизма за счет остановок выходных звеньев в конечных фазах движения. Ползун 7, двигаясь в направлении, указанном стрелкой, вращает плечо 3 кривошипа и одновременно перемещает массу 11 полезного груза. Упор 6, закрепленный на плече 3 кривошипа, воздействует на его плечо 4 и через шатун 10 перемещает ползун 8 с массой 12. В точке Da ползун 7 останавливается, а ползун 8 движется по инерции. Шатун 10 переходит от упора 6 к упору 5, также закрепленному на плече 3 кривошипа, сообщает последнему вращение, и ползун 7 движется в обратном направлении. В точке Вз ползун 8 будет иметь остановку, пока плечо 3 кривошипа будет поворачиваться на угол между упорами 5 и 6, после чего ползун 8 двинется в обратном направлении. Затем цикл повторяется, обеспечивая рекуперативное возвратно-поступательное движение масс II и 12 с остановками в крайних положениях. 1 ил. с S
| Артоболевский И | |||
| И | |||
| Механизм в современной технике | |||
| Т | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Кренометр | 1923 |
|
SU487A1 |
| Насос для горючей жидкости для двигателей внутреннего горения | 1924 |
|
SU1496A1 |
