Изобретение относится к области машиностроения, а точнее к манипуляторам для механизации и автоматизации транспортировки изделий в рабочую зону оборудования.
Целью изобретения является повышение Надежности работы путем осуществления всех перемещений механической руки от одного привода.
На фиг.1 изображена кинематичес- кая схема манипулятора; на фиг.2 - вид А на фиг.1.
Манипулятор состоит из закрепленной на основании оси 1, на которой смонтирован корпус-маховик 2 с уста- новленной в его направляющих кареткой 3, в направляющих которой смонтирована механическая рука 4 с зубчатой рейкой. Корпус 2 связан зубчатыми колесами 5 и 6 с шарнирным четы- рехзвенником, состоящим из кривоши- цов 7 и 8 и шатуна 9. Кривошип 8 через управляющую сцепную муфту 10, маховик 1 с тормозом 12 и сцепную муфту 13 связан с двигателем 14. На оси 1 закреплено зубчатое колесо 15 и выполнена винтовая нарезка 16, зубчатое колесо 15 находится в. зацеплении с зубчатым колесом 17, которое закреплено на шлицевом валу 18 смонтированном в корпусе 3. На винтовой нарезке 16 смонтирована гайка 19 с зубчатым венцом. Зубчатые колеса 20 и 21 установлены на валу 18 с возможностью продольного перемещения и соединения с ним при помощи управляемых сцепных муфт 22 и 23, при этом зубчатое колесо 20 входит в зацепление с рейкой механической руки 4, а зубчатое колесо 21 входит в за- цепление с зубчатым венцом гайки 19.
Манипулятор работает следуюш м образом.
В положении Г происходит включе- ние муфты 10 и выключение муфты 13. При этом начинается поворот кривошипа 8 в направлении стрелки до положения II. Маховик 11 полностью тормозится, останавливаясь в положении II, а кривошип 7 разгоняется, приобретая в положении II максимальную скорость При этом с помощью передачи происходит поворот корпуса 2, вьщвижение механической руки 4 за счет взаимодей- ствия зубчатых колес 15, 17 и 20 с рейкой руки 4 при выключенной муфте 22, а также подъем каретки 3 за счет взаимодействия зубчатого колеса 21 с
зубчатым венцом гайки 19, которая взаимодействует с винтовой нарезкой 16.
При переходе кривошипа 7 из положения II в положение III продолжаются поворот корпуса 2, подъем каретки 3 и вьщвижение. руки 4, но уже с торможением, в положении III они останавливаются и их кинетическая энергия возвращается маховику 11. Муфта 10 отключается. Обратный поворот, опускание каретки и втягивание механической руки аналогичны: в положении III и IV происходит их разгон, в положении IV-I - торможение.
После окончания перемещения муфта 10 выключается, а муфта 13 включается и происходит разгон маховика, компенсирующий потери энергии.
Формула изобретения
Манипулятор, содержащий основание механическую руку, размещенную на основании с возможностью подъема, поворота и радиального перемещения относительно оси поворота, и привод, состоящий из двигателя, двух маховиков и двух управляемых муфт Сцепления, причем маховики связаны между собой кривошипно-шатуннь1м механизмом, отличающийся тем, что, с целью повышения надежности работы путем осуществления веех перемещений механической руки от одного привода, основание снабжено жестко связанной с ним осью, один из маховиков привода выполнен в виде корпуса с первыми направляющими, смонтированного с возможностью вращения на указанной оси, а в направляющих этого.корпуса дополнительно размещена каретка, снабженная вторыми направляюш 1ми, в которых размещена механическая рука, вдоль оси которой дополнительно закреплена зубчатая рейка, при зтом упомянутые ось основания и каретка кинематически связаны между собой парой винт - гайка, в которой винтовая нарезка вьшол нена на оси основания, а гайка смонтирована с возможностью вращения в каретке и на наружной своей поверхности имеет зубчатый венец, при этом корпус снабжен дополнительным валом, расположенным параллельно оси основания, и на этом валу смонтированы с возможностью осевого перемещения два дополнительных зубчатых колеса, осна. 313152944
щенные управляемыми муфтами сцепле- ся в зацеплении с зубчатой рейкой ния с упомянутым валом, причем одно механической руки, а другое - с зуб- из указанных зубчатых колес -находит- чатым венцом гайки.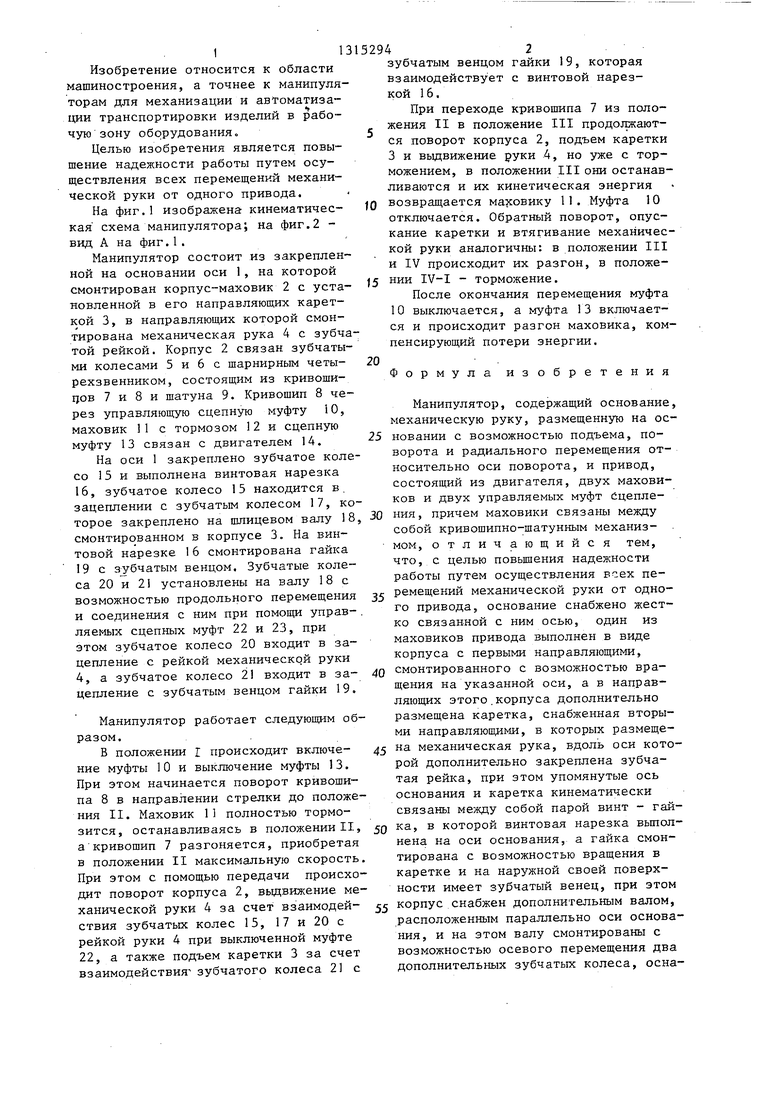
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1989 |
|
SU1646843A1 |
| Манипулятор | 1985 |
|
SU1321577A1 |
| Шпиндельный узел радиально-сверлильного станка | 1976 |
|
SU610616A1 |
| Манипулятор | 1989 |
|
SU1685701A1 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| Манипулятор | 1986 |
|
SU1357220A1 |
| Манипулятор | 1985 |
|
SU1284821A1 |
| Автоматический манипулятор | 1989 |
|
SU1660951A1 |
| ГИБРИДНЫЙ СИЛОВОЙ АГРЕГАТ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2357876C1 |
| Устройство для сборки | 1989 |
|
SU1708573A1 |

Изобретение относится к области машиностроения, а именно к манипуляторам для механизации и автоматизации транспортировки изделий в рабочую зону оборудования. Целью изобретения является повышение надежности за счет осуществления всех перемещений механической руки от одного привода. При включении управляемой муфты 10 через кривошипно-шатунный механизм 7-9 и зубчатую передачу 5-6 осуществляется поворот корпуса 2. При этом происходит обкатка зубчатого колеса 17 относительно зубчатого колеса 15. Включением управляемьпс сцепных муфт 22 и 23 зубчатые колеса 20 и 21 соединяются с валом 18 и взаимодействуют соответственно с зубчатой рейкой на механической руке 4 и зубчатым венцом на гайке 19, при этом происходят радиальное перемещение механической руки 4 и осевое перемещение каретки 3 относительно корпуса 2. При прямом и обратном перемещениях руки 4, каретки 3 и к орпуса 2 происходит взаимообмен кинетической, энергии между механической .массой корпуса 2 и маховиком 11. Двигателем 14 через управляемую муфту 13 осуществляется дополнительный разгон маховика 11 для компенсации потерь энергии при работе манипулятора. 2 ил. к (С (Л с: о: Сл ьо со 4 fut.t
f3
15
Вид А 20 17
и
в
фиг. 2
Редактор Л.Гратилло
Составитель Ю.Бильчинский
Техред н.Глущенко Корректор Н.Король
Заказ 2258/17
Тираж 953Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Манипулятор | 1982 |
|
SU1073090A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
