(54) УСТРОЙСТВО.ДЛЯ ПОДАЧИ И ТОЧНОГО ОСТАНОВА ХЛЫСТОВ





I
Изобретение относится к лейкой и ;деревоофабатываюшей промышленности и может быть использовано в раскряжевочных установках с продольной подачей.
Известно устройство для отмера длин сортиментов, включакщее механизм по дачи с приводом, подвижный упор, соехшненный с приводом посредстве бесконечного гибкого тягового органа с ведущим и ведомым блоками р.J.
ИзвестЕго также устройство для подача н точного останова хлыстов, вклю аюшеэ механизм подачи с приводом, подвижный упор, соединенный с приводом посред- вом бесконечного гибкого тягового органа с ведущим И ведомым блоками, систему управления приводами с блоками их торможеиЕЯ
Недостатком этих устройств является недостаточно высокая производительност при наличии повышенных динамических нагрузок в упоре и етЧ) приводе.
Цель изобретения - повышение производительности и снижение динамических нагрузок в упоре и его приводе, а-также повышение надежности работы.
Цель достигается тем, что устройство снабжено направляющими и установленной в них имекнцей привод в виде гидроцилиндра кареткой, датчиком положения каретки и гидросистемой, содержащей напорную и сливную магистрали, которые соединены соответственно с порш:1евой и штоковой полостями гидроцилйндра привода каретки, и распределитель с клапаном, через которые свяганы полости гддро1шлиндра, причем ведомый блок установлен на каретке, а датчик положения каретки подключен к систем.э управления приводами, а также тем, что устройство снабжено дополнительным датчиком положения каретки и дополнительным датчиком положения упора, которые подключены к блоку торможения системы управления приводами.
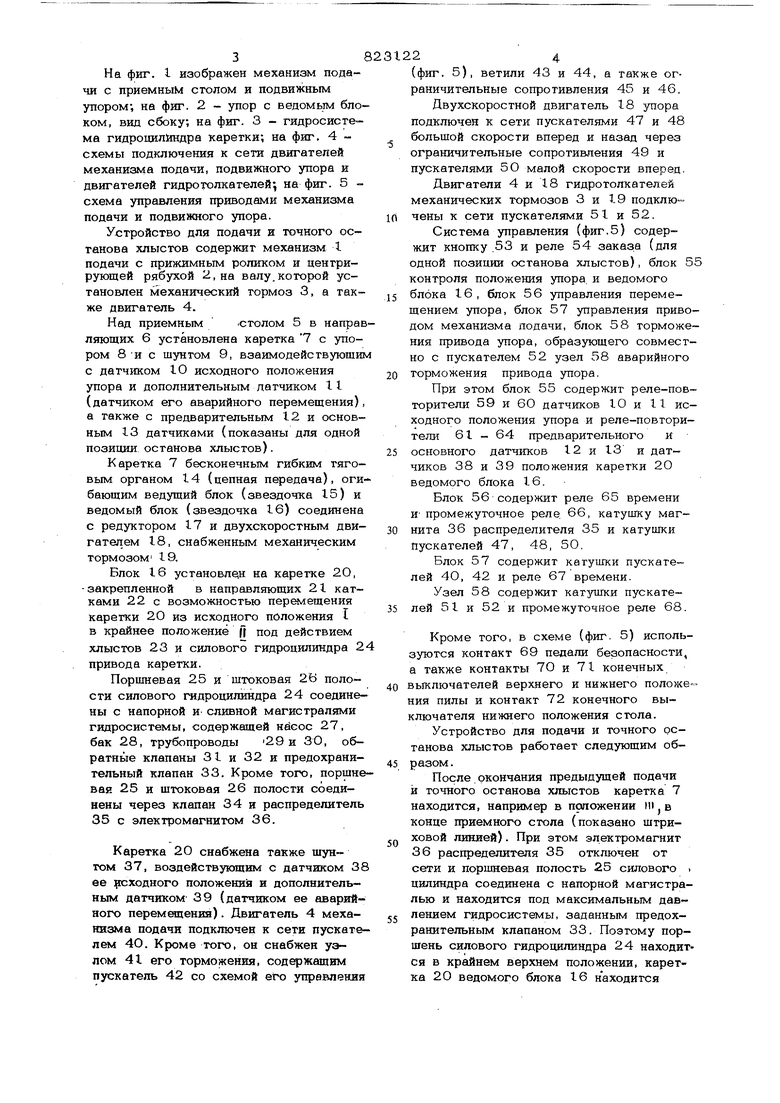
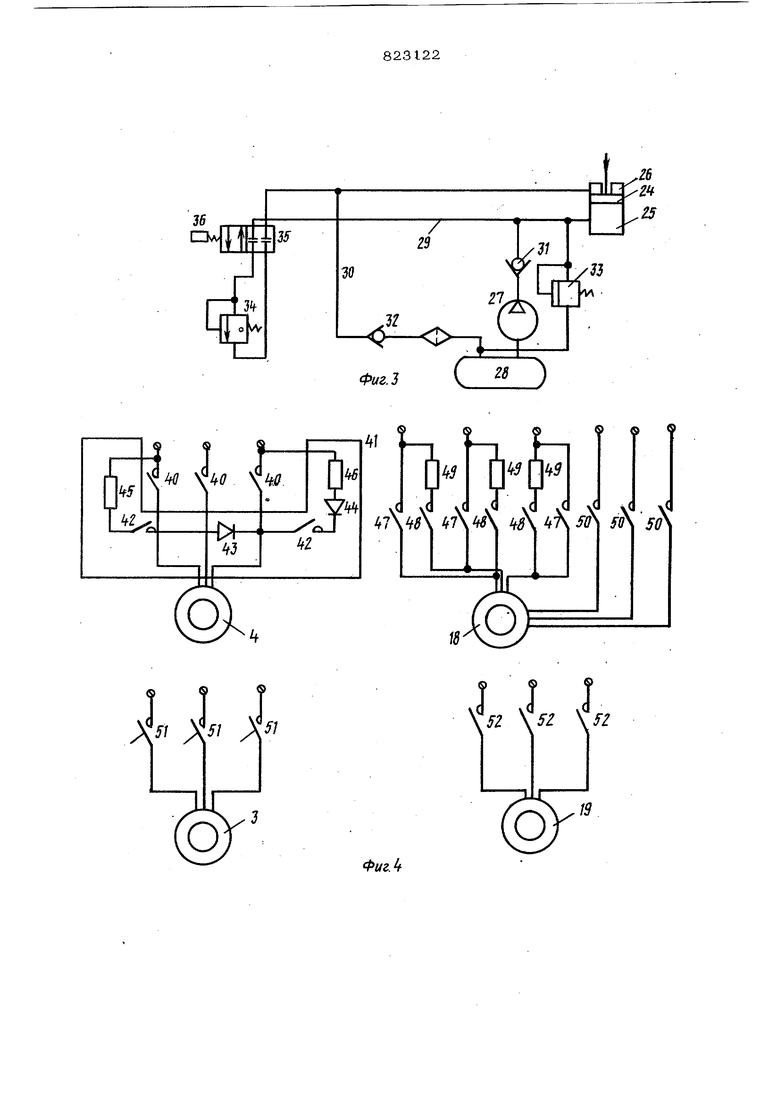
На фиг. I изображен механизм подачи с приемным столом и подвижным упором; на фиг. 2 - упор с ведомым блоком, вид сбоку; на фиг. 3 - гидросистема гидроцилйндра каретки; на фиг. 4 .схемы подключения к сети двигателей механизма подачи, подвижного упора и двигателей гидротолкаталей; на фиг. 5 схема управления приводами механизма подачи и подвижного упора.
Устройство для подачи и точного останова хлыстов содержит механизм I подачи с прижимным роликом и центрирующей рябухой 2, на валу.которой установлен механический тормоз 3, а также двигатель 4.
Над приемным столом 5 в направляющих 6 установлена каретка 7 с упором 8 И с шунтом 9, взаимодействующим с датчиком 10 исходного положения упора и дополнительным датчиком II (датчиком его аварийного перемещения), а также с предварительным 12 и основным 13 датчиками (показаны для одной позишш останова хлыстов).
Каретка 7 бесконечньп гибким тяговым органом 14 (цепная передача), огибающим ведущий блок (звездочка 15) и ведомый блок (звездочка 16) соединена с редуктором 17 и двухскоростным двигателем 18, снабженным механическим тормозом 19,
Блок 16 установлен на каретке 2О, -закрепленной в направляющих 21 катками 22 с возможностью перемещения каретки 20 из исходного положения t в крайнее положение (1 под действием хлыстов 23 и силового гидроцилиндра 2 привода каретки.
Поршневая 25 и штоковая 2В полости силового гидроцилиндра 24 соединены с напорной и сливной магистралями гидросистемы, содержащей нёсос 27, бак 28, трубопроводы 29 и ЗО, обратнью клапаны 31 и 32 и предохранительный клапан 33. Кроме того, поршневая 25 и щтоковая 26 полости соединены через клапан 34 и распределитель 35 с электромагнитом 36.
Каретка 20 снабжена также щунтом 37, воздействующим с датчиком 38 ее сходного положения и дополнительным датчиком 39 (датчиком ее аварийного перемещения). Двигатель 4 механизма подачи подключен к сети пускателем 40. Кроме того, он снабжен уалом 41 его торможения, содержащим пускатель 42 со схемой его управления
(фиг. 5), ветили 43 и 44, а также ограничительные сопротивления 45 и 46. Двухскоростной двигатель 18 упора подключен к сети пускателями 47 и 48 большой скорости вперед и назад через ограничительные сопротивления 49 и пускателями 5О малой скорости вперед.
Двигатели 4 и 18 гидротолкателей механических тормозов 3 и 19 подключены к сети пускателями 51 и 52.
Система управления (фиг.5) содержит кнопку .53 и реле 54 заказа (для одной позиции останова хлыстов), блок 55 контроля положения упора и ведомого
блока 16 , блок 56 управления перемещением упора, блок 57 управления приводом механизма подачи, блок 58 торможения привода упора, образующего совместно с пускателем 52 узел 58 аварийного
торможения привода упора.
При этом блок 55 содержит реле-повторители 59 и 60 датчиков 10 и 11 исходного положения упора и реле-повторители 61 - 64 предварительного и
основного датчиков 12 и 13 и датчиков 38 и 39 положения каретки 2О ведомого блока 16.
Блок 56 содержит реле 65 времени и- промежуточное реле. 66, катушку магнита 36 распределителя 35 и катушки пускателей 47, 48, 50.
Блок 57 содержит катушки пускателей 40, 42 и реле 67 времени.
Узел 58 содержит пускателей 51 и 52 и промежуточное реле 68.
Кроме того, в схеме (фиг. 5) используются контакт 69 педали безопасности, а также контакты 70 и 71 конечных
выключателей верхнего и нижнего положе-ния пилы и контакт 72 конечного выключателя нижнего положения стола.
Устройство для подачи и точного останова хлыстов работает следующим образом.
После окончания предыдущей подачи и точного останова хлыстов каретка 7 находится, например в положении Ml в конце приемного стола (показано штриховой линией). При этом электромагнит 36 распределителя 35 отключен от сети и Поршневая полость 25 силового цилиндра соединена с напорной магистралью и находится под максимальным давленнем гидросистемы, заданным предохранительным клапаном 33. Поэтому поршень силового гидроцилиндра 24 находится в крайнем верхнем положении, каретка 20 ведомого блока 16 находится в положении ) , а гибкие тяговые органы 14 натянуты. Подается команда на опускание пилы на хльгсты, после пропиливания которых она воздействует на конечный выключатель 71 ее нижнего .положения. Последни включает промежуточное реле 68, которо включает пускатели 51 и 52 двигателей гидротолкателей, которые размыкают механическиетормоза 3 и 19. Одновременно подается команда на опускание прием ного стола (не показано), который в нижнем положении воздействует на контакт 72 конечного выключателя и сбрасывает отпиленные сортименты. Конечный выключатель включает реле 66, а последнее - пускатель 48 большой скорости двигателя 18 упора назад. На большой скорости, например 1,2 м/с, каретка 7 с упором 8 перемещается навстречу подающему механизму I. Практически одновременно пила приходит в верхнее положение и замыкает контакт 7О выключателя ее верхнего положения. Оператор при нажатой контактом 69 педали безопасности нажимает кнопку 53 для очередного заказа. Включается реле«54 заказа. Последнее включает пускатель 4О и магнит 36, который переключает распределитель 35 в положение, соединяющее насос 27 и поршневую ПОЛОСТЬ 25 через клапан 34 с трубопроводом 30 через обратный кла- пан 32наслив.При этом клапан 34 отрегулирован на пониженное давление и поэтому далее, как и клапан 32, постоян но открыт, Хлыстьт 23 подающим механизмом I на рабочей скорости, например 1,2 м/с, пепемещаются по стрелке и, например в , , положении IV (фиг.2), каретка 7 и uuaum. iv vH / tупор 8 соударяются с хлыстами 23. При этом упор 8 двигателем 18 поджимается к одному из торцов хлыстов и их выравнивает, а каретка 2О из исходного положения I под действием Хлыстов начинает также перемещаться в направлении по стрелке совместно с ведомым блоком 16. Шунт 37 при этом включает датчик 3 а последний - реле-повторитель 63. Это реле отключает пускатель 48 и включает пускатель 47. Осуществляется совместный одновременный разгон упора со стороны его двигателя 18 и хлыстов 23 в направлении по стрелке. При этом за время переключения аппаратуры и разго8 .226 на упора с хлыстами каретка 2О продолжает перемещаться в направлении к ее положеншо К , но до него не доходит. Инерционные силы, возникающие при ударе хлыстов в упор в гибком тяговом органе 14 в процессе их совместного соударения и разгона, уменьшаются, и каретка 2О начинает вновь возвращаться в положение I , а гибкий тяговый орган из положения V (показан штриховой линией) в рабочее положение. С выдержкой времени включается реле 65 времени, . .которое вновь включает пускатель 48 и отключает пускатель 47. Упор. 8 с относительно небольшим усилием поджимается к торцу одного из хлыстов и практически непрепятствует их совместному перемещению на .рабочей скорости.. При аварийной ситуации, в случае невключения двигателя 18, ротор последнего со стороны упора является очень большим маховиком, и поэтому большие инерционные силы продолжают действов.ать н далее. Они перемешают каретку 2О до такого положения, в котором шунт 37 включает датчик 39 и его реле-повторитель 64. При этом каретка 7 из положения iV перемещается в положение Yl . Реле 64 отключает пускатели 40, 47, 48, 51, 52 и включает реле 67 времени ипускатель 42 динамического торможения. При этом все двигатели отключаются и осуществляется аварийное торможение двигателя 4 механизма подачи, а затем замыкание механических тормозов 3 и 19 и останов хлыста упором 8 с гидроциливдром 24. ри нормальном включении двигателя совместно с хлыстами на ра i о у бочей скорости, например 1,2 м/с, переi i- i-f мещается далее в направлении по стрелке (в этом случае каретка 2О находится в исходном положении J (, и его шунт 9 включает предварительный датчик 12 и реле-повторитель 61, которое включает реле 67 времени и пускатели 50 и 42 малой скорости двигателя 18 упора и динамического торможения двигателя 4, и отключает магнит 36 и реле 68. Осуществляется совместное интенсив ное торможение хлыстов двигателем 4 (динамическое) и упором 8 (рекуперативное торможение двигателя 18). При этом клапан 34 распределителем 35 отключается от гидросистемы силового цилиндра 24 и давление в нем значительно увеличивается, и он препятствует
уже перемещению каретки 20 ведомого блока 16 из исходного положения I , а упор 8 приобретает силовые функции и интенсивно выравнивает торцы хлыстов 23
После снижения скорости срабатывает реле 67 времени, которое отключает пускатель 42 динамического торможения и вновь включает пускатель 40 большой скорости двигателя 4 механизма подачи.
Хлысты 23 пытаются разогнуться
до рабочей скорости, но этому препятствует упор 8, об который они активно выравниваются, а также двигатель 18, работающий в режиме рекуперативного торможения и уже замкнутый на малой скорости тормоз 19.
Хлысты 23, вьфавниваясь об упор, перемещаются совместно с упором 8 на малой скорости, например 0,4 м/с, и
при этом шунт 9 каретки 7 включает основной датчик 13 и реле 62. Последнее отключает двигатели 4 и 18, а за счет предварительного замыкания тормозов 3 и 19 упор 8 приобретает свойства силового стационарного упора и интенсивно останавливает хлысты с сохранением их выравненных торцов, а прижимной ролик и рябуха 2 препятствую их самопроизвольному отходу от упора 8
Реле 64 также дает команду на опускание пилы (не показана) и далее работа.осуществляется аналогично приведенной вьпие.
При несрабатывании датчиков 12 и 13 и системы их управления шунт 9 упора включает дополнительный датчик 1 аварийного перемещения и реле 60, Последнее отключает пускатели 4О, 51 и . 52 и включает реле 67 времени. Осуществляется вновь аварийное торможение привода дв:ягателя 4 подачи и привода двигателя 18 упора, а также включение магнита 36. При этом упор 8 вновь
работает как упор с гидроцилиндррм 24
и останавливает совместно с приводом двигателя 4 хлыст в конце приемного стола без аварийных последствий.
Формула изобретения
с ведущим и ведомым блоками, систему управления приводами с .блоком их торможения,.отличающееся тем, что, с целью повышения производительности и снижения динамических нагрузок в упоре и его приводе, устройство снабжено направляющими и установленной в них имеющей привод в виде гидроцилиндра кареткой, датчиком положения каретки и гидросистемой, содержащей напорную и сливную магистрали, которые соединены соответственно с поршневой и штоковой полостями гидроцилиндра привода каретки, и распределитель с клапаном, через которые связаны полости гидроцилиндра, причем ведомый блок установлен на каретке, а датчик положения каретки подключен к системе управления приводами.
Источники информации принятые во внимание при экспертиза
кл. В 27 В 5/ОО, 1978 (прототип).
s
I I l
/й(.
It6 Н
Фиг.З
(9Q99 9
Т. Jrn М
vd yd yd yd yd .d vO
A 4A ЛП
1
Xs л
il
II J
V« V5/ V/
4
