Изобретение относится к автоматическому управлению многомерными объектами со многими запаздываниями по состоянию, параметры и значения запаздываний которых известны неточно, и может быть использовано при разработке систем автоматизированного управления для производственнотехнологических объектов.
Известно устройство компенсации запаздывания в объектах управления, в котором параллельно объекту управления включается полная модель объекта и модель объекта управления без запаздывания 1.
Для функционирования систем автоматического управления с такими устройствами требуется точное знагние модели объекта управления. Как . правило, параметры объекта управления точно неизвестны и (или) изменяются во времени. Это приводит к снижению качества автоматического управления, а в ряде случаев, к потере устойчивости и неработоспособности системы.
Наиболее близким по достигаемому результату к предлагаемому является устройство компенсации запаздывания, содержащее сумматор, первый и второй
блоки запаздывания, блок сравнения, выход которого соединен с входом, объекта управления 2.
-Данное устройство есть распространение первого устройства на многомерные объекты и также имеет малую точность.
Цель изобретения - повышение точ10ности компенсации запаздывания и устойчивости системы автоматического управления при неточном знании и изменении параметров объекта управления.
Указанная цель достигается тем,
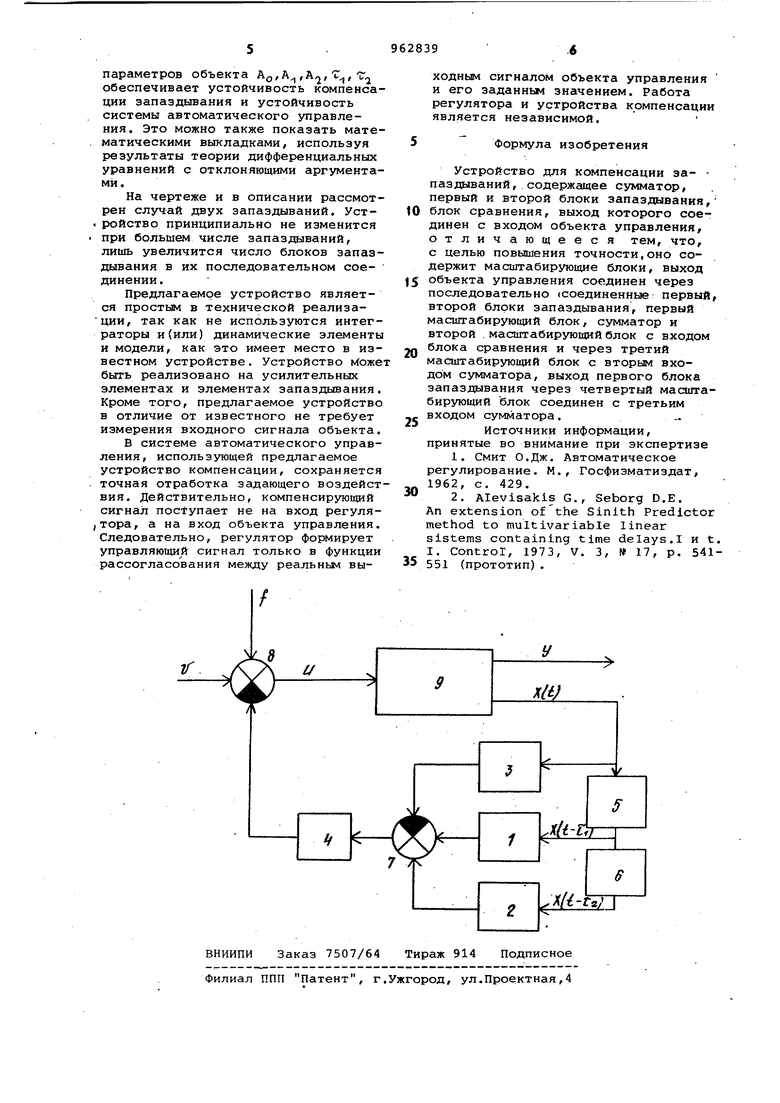
15 что устройство компенсации запаздываний содержит масштабирующие блоки, выход объекта управления соединен через последовательней соединенные первый и второй блоки запаздывания,
20 первый масштабирующий блок, сумматор и второй масштабирующий блок с входом блока сравнения и через третий масштабирующий блок с вторым входом сумма-гора, выход первого блока за25паздывания через четвертый масштабирующий блок соединен с третьим входом сумматора.
На чертеже изображена структурная схема устройства компенсации
30 запаздываний.
УСТРОЙСТВО содержит четвертый масштабирующий блок 1, первый масштабирующий блок 2, третий масштабирующий блок 3, второй масшта бирующий блок 4, первый блок 5 запаздывания, второй блок б запаздывания, сумматор 7, блок 8 сравнения, многомерный объект 9 управле1| 1Я с з шаздываниями по состоянию.
Изобретение обеспечивает компенсацию запаздываний по отношению к управляемым переменньм следующего объекта управления с запаздываниями по состоянию (t)(t-t;)(t-r)+Bo(t)+ B(t)(Ч) y(t) С x(vt) , где x(t) - вектор выхода (состояния объекта управления; U(t) - вектор входа объекта управлениягf(t) - вектор возмущающих воздействий;y(t) - вектор управляемых переменных;B,B - числовая матрица входа и в матрица возмущения; -числовая матрица выхода (СВ-квадратная.матрица) -значения запаздываний в объекте управления; АО - числовая квадратная матрица ; А, числовые квадратные матр цы состояния, соответствующие первому и второму запаздываниям объекта. При отсутствии запаздываний векторное дифференциальное уравнение, описывающее динамику изменения вектора управляемых пере менных y(t), в соответствии с (1) и (2) будет иметь вид - (t;4CBu{t C6 Ct). (Ъ) Устройство работает следующим образом, Выходной сигнал x(t) поступает на ход блока 3 и подвергается мас абированию. Матрица коэффицие тов Ттередачи (усиления) элементов масштабирующего блока 3 равна Поэтому сигнал на выходе блока 3 имеет вид (А,,+А.)х (t) , Матрицы коэ фициентов передачи для масштабирую щих блоков 1,2 и 4 устанавливаются равными А,А и (СВ) соответствен Блок 5 запаздывания обеспечивает запаздывание на величину t-, , а бл б - на величину f , Выходной сигнал x(t), проходя через последовательное соединение блоков 5 и 6, сдвигается во времени и принимает вид xit-f-,) на выходе блока 5 и x(t-T,) на выходе блока 6. Выходные сигналы блоков запаздывания x(t-C) и x(t-ti), поступая на входы блоков 1 и 2, подвергаются масшта бированию.
На выходе блоков 1 и 2 будут сигналы (t-r) и (t-t,) соответственно. В результате аЛгебраиеского суммирования выходных сигнаов блоков 1-3, выполняемого в локе 7, на выходе блока 4 появляетя вектор сигналов ()x(t) + (t-t)(t-f). В масштабируюем блоке 4 этот сигнал подвергаетя пресЯбразованию в соответствии с атрицей (СВГс. Выходной сигнал блока 4 после равнения с управляющим сигналом (t) в блоке 6 поступает на вход бъекта управления в следующем виде: . .. (i) V(t)-(cB) ()x(t)(t-r) + Дка-Г.) f (i). В соответствии с выражениями (1), (2) и (4) дифференциальное уравнение, определяющее динамику объекта управления по отношению к вектору измеряемых переменных y(t), принимает вид .A,x(t-C,).A,x(t-r,)(c6)(,)X(i)(t-C:)+ + (i-r,).(5) Отсюда | c{Ao+A,)x(t)+cBv(t)+cBf(t)ib) Выражение (6) для совокупности объекта 9 управления и устройства компенсации совпадает с выражением (3) при отсутствии запаздываний в объекту управления. Преимуществом предлагаемого устройства по сравнению с известньми является то, что система, состоящая из устройства компенсации запаздывания и объекта управления, является системой с отрицательной обратной связью (без учета регулятора и главной обратной t связи), При этом используются свойства подобных систем подавлять параметрические возмущения , Вследствие описанного соединения функциональных элементов устройство компенсации, как устройство обратной связи, при изменении
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивная система регулирования многомерного объекта | 1981 |
|
SU1174901A1 |
| Система автоматического регулирования для объектов с запаздыванием | 1974 |
|
SU538339A1 |
| Адаптивное устройство для идентификации линейных объектов | 1988 |
|
SU1520478A1 |
| Устройство для компенсации запаздываний | 1986 |
|
SU1409966A1 |
| АДАПТИВНЫЙ СЛЕДЯЩИЙ ИЗМЕРИТЕЛЬ | 2012 |
|
RU2492506C1 |
| Регулятор | 1989 |
|
SU1789969A1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ОБЪЕКТА С РЕЦИКЛОМ | 2013 |
|
RU2562362C2 |
| Устройство терминального управления | 1986 |
|
SU1332262A1 |
| Прогнозирующий регулятор с переменной структурой | 1981 |
|
SU980068A1 |
| Адаптивное устройство для идентификации линейных объектов | 1981 |
|
SU957168A1 |
