Н
QD QO О) X)
Изобретение относится к технике автоматического управления и может быть использовано в системах управления станками, промьшшенными роботами и другими объектами, требующими ре- гу ирования скорости перемещения.
Цель изобретения - повьпиение надежности, увеличение срока службы двигателя за счет эффективного ограничения величины тока и улучшение динамических характеристик электропривода.
На чертеже представлена структур- нал схема следящего электропривода. Электропривод содержит алгебраически сумматор 1, регулятор 2 скорости, первый ограничитель 3 уровня сигнала сумматор А, усилитель 5 мощности, двигатель 6 постоянного тока, датчик 7 скорости, первое, звено 8 с,зоной нечувствительности,первое корректирующее устройство 9, второй ограничитель 10 уровня сигнала, второе звено 11 с зоной нечувствительности и второе корректирующее устройство 12.
Следящий электропривод работает следующим образом.
Сигнал задания скорости поступает
0
j
я Я 0
5
где i., Ufl - ток и напряжение на якоре двигателя; активное сопротивление; скорость вращения двигателя;
Kjj - коэффициент противоЭДС. Сигнал с выхода сумматора 4, кроме того, поступает через второе звено 1 1 с зоной нечувствительности и в.торое корректирующее устройство 12 на третий вход алгебраического сумматора 1, подстраивая управляющее устройство, в состав которого входят блоки 1-4, 8-12, под изменяющиеся при разных напряжениях параметры двигателя для оптимизации настройки на разных уровнях.управляющих сигналив.
Формула изобретения
1. Следящий электропривод, содержащий последовательно соединенные алгебраический сумматор, первый вход которого является входом электропривода, регулятор скорости и первый ограничитель ур овня сигнала, а также последовательно соединенные усилитель мощности, двигатель постоянно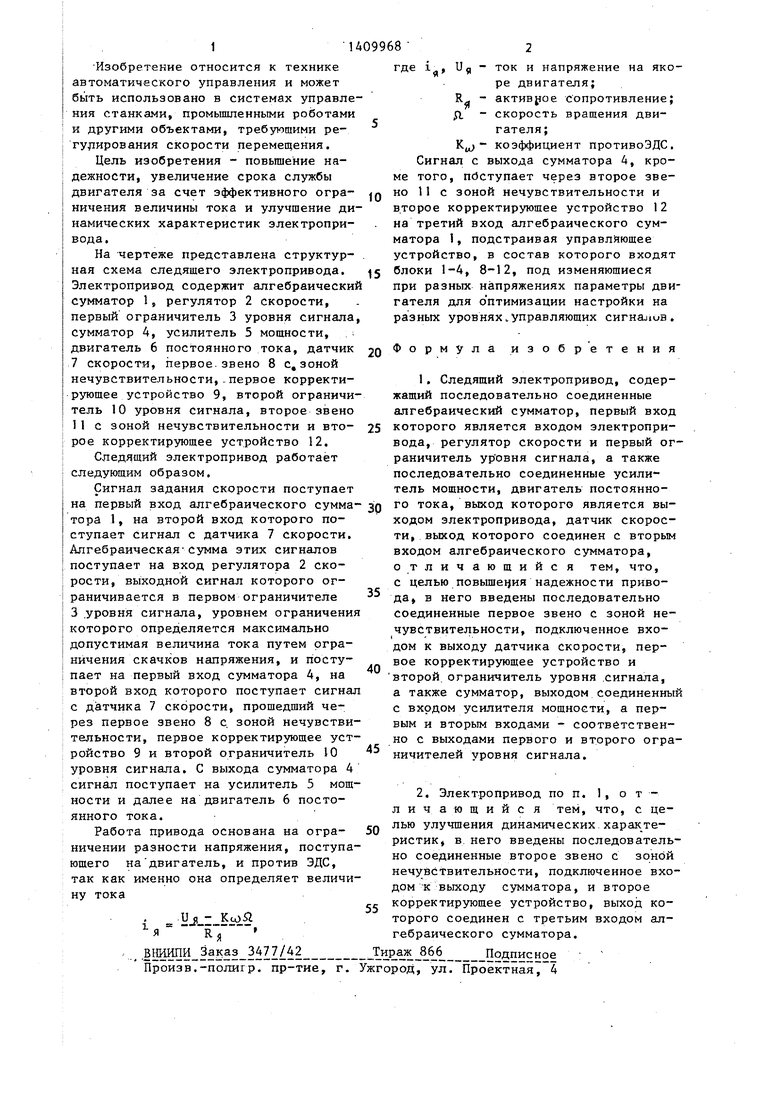
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий электропривод | 1984 |
|
SU1251024A1 |
| Следящий электропривод | 1986 |
|
SU1363132A1 |
| Следящий электропривод | 1988 |
|
SU1562887A1 |
| Электропривод | 1985 |
|
SU1277344A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ С ФРИКЦИОННОЙ НАГРУЗКОЙ | 1992 |
|
RU2079961C1 |
| СЛЕДЯЩИЙ РУЛЕВОЙ ЭЛЕКТРОПРИВОД | 2009 |
|
RU2399017C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД НЕПОСРЕДСТВЕННОГО УПРАВЛЕНИЯ С АДАПТИВНЫМИ СВОЙСТВАМИ | 2008 |
|
RU2368932C1 |
| Следящая система позиционирования | 1982 |
|
SU1095132A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| Устройство для управления асинхронным электродвигателем | 1990 |
|
SU1791952A1 |
Изобретение относится к области автоматического управления и может быть использовано в системах управления станками, промышленными роботами и другими объектами, требующими регулирования скорости перемещения. Цель изобретения - повышение надежности и улучшение динамических характеристик электропривода. В структурную схему следящего электропривода входят алгебраический сумматор 1, регулятор 2 скорости, первый ограничитель 3 уровня сигнала, сумматор 4, усилитель 5 мощности, двигатель 6 постоянного тока, датчик 7 скорости, первое звено 8 с зоной нечувствительности, первое корректирующее устройство 9, второй ограничитель 10 уровня сигнала, второе звено- 1 1 с зоной нечувствительности, второе корректирующее устройство 12. 1 з.п, ф-лы, 1 ил.
на первый вход алгебраического сумма- jQ I O тока, выход которого является вытора 1, на второй вход которого поступает сигнал с датчика 7 скорости. Алгебраическая-сумма этих сигналов поступает на вход регулятора 2 скорости, выходной сигнал которого ограничивается в первом ограничителе 3 уровня сигнала, уровнем ограничения которого определяется максимально допустимая величина тока путем ограничения скачков напряжения, и поступает на первый вход сумматора 4, на второй вход которого поступает сигнал с датчика 7 скорости, прощедший через первое звено В с, зоной нечувствительности, первое корректирующее устройство 9 и второй ограничитель Ю уровня сигнала. С выхода сумматора 4 сигнал поступает на усилитель 5 мощности и далее на двигатель 6 постоянного тока.
35
40
45
ходом электропривода, датчик скорости, выход которого соединен с вторым входом алгебраического сумматора, отличающийся тем, что, с целью повышения надежности привода в него введены последовательно соединенные первое звено с зоной нечувствительности, подключенное входом к выходу датчика скорости, первое корректирующее устройство и второй, ограничитель уровня .сигнала, а также сумматор, выходом соединенный с входом усилителя мощности, а первым и вторым входами - соответственно с выходами первого и второго ограничителей уровня сигнала.
ничении разности напряжения, поступающего на двигатель, и против ЭДС, так как именно она определяет величину тока
но соединенные второе звено с нечувствительности, подключенное входом К выходу сумматора, и второе корректирующее устройство, выход которого соединен с третьим входом алгебраического сумматора.
.
R
ходом электропривода, датчик скорости, выход которого соединен с вторым входом алгебраического сумматора, отличающийся тем, что, с целью повышения надежности привода в него введены последовательно соединенные первое звено с зоной нечувствительности, подключенное входом к выходу датчика скорости, первое корректирующее устройство и второй, ограничитель уровня .сигнала, а также сумматор, выходом соединенный с входом усилителя мощности, а первым и вторым входами - соответственно с выходами первого и второго ограничителей уровня сигнала.
ристик, в. него введены последователь- зоной
но соединенные второе звено с нечувствительности, подключенное входом К выходу сумматора, и второе корректирующее устройство, выход которого соединен с третьим входом алгебраического сумматора.
| Башарин А.В., Новиков В.А., Соколовский Г.Г | |||
| Управление электроприводами | |||
| Л.: Энергоиздат, 1982, с | |||
| Устройство для охлаждения водою паров жидкостей, кипящих выше воды, в применении к разделению смесей жидкостей при перегонке с дефлегматором | 1915 |
|
SU59A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Фальцовая черепица | 0 |
|
SU75A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Там же, с | |||
| Способ подготовки рафинадного сахара к высушиванию | 0 |
|
SU73A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
