1277344
1
Изобретение относится к электротехнике и может быть использовано в синхронных электроприводах для регулирования частоты вращения электродвигателя и положения нагрузки нри высоких требованиях к точности и качеству регулирования.
Целью изобретения является упрощение и повышение надежности электропривода.
На чертеже представлена функциональная схема электропривода с синхронным электродвигателем.
Электропривод содержит синхронный электродвигатель 1, датчик 2 угла, механически связанный с синхронным электродвигателем 1, подключенным через усилитель 3 мощности к выходу релейного регулятора 4 токов, состоящего из последовательно соединенных блока 5 элементов сравнения и блока 6 релейных элементов с гистерезисом, вычитающий вход блока 5 элементов сравнения подключен к выходу датчика 7 токов, вход которого соединен с выходом уси- лителя 3 мощности, суммирующий вход блока 5 элементов сравнения соединен с выходом блока 8 задания токов, один вход которого подключен к выходу датчика 2 угла, а другой вход через инерционное звено 9 соединен с выходом ограничителя 10 напряжения. Силовой вход ограничителя 10 напряжения соединен с выходом регулятора угла II с суммирующим и вычитающим входами, вычитающий вход регулятора угла подключен к выходу датчика 2 угла, а суммирующий вход предназ- начен для подачи сигнала задания.
Выход блока 5 элементов сравнения через последовательно соединенные блок 12 релейных элементов с зоной нечувствительности, выпрямитель 13 и логический сумматор 14 подключен к управляющему входу ограничителя 10 напряжения.
Электропривод работает следующим образом.
Синхронный электродвигатель производит перемещение нагрузки. Для отработки заданного положения в регуляторе угла 11 производится сравнение сигнала задания с выходным сигналом датчика 2 угла. В результате на выходе регулятора угла 11 формируется управляющее напряжение, которое через ограничитель 10 напряжения и инерционное звено 9 поступает на вход блока 8 задания токов, на другой вход блока 8 задания токов поступает информация об угловом положении ротора двигателя с датчика 2 угла. На выходе блока 8 задания токов формируются напряжения, являющиеся синусоидальными функциями угла амплитуда этих напряжений пропорциональна сигналу задания момента, поступающему с выхода инерционного звена 9.
В блоке 5 элементов сравнения произ- водится сравнение токов, протекающих в фазах электродвигателя 1, с сигналами задания тока, поступающими с блока 8. При
о
0 5
5
2
этом релейные элементы с гистерезисом бло ка 6, число которых равно числу фаз электродвигателя, производят включение и отключение соответствующих силовых ключей усилителя 3 мощности. В результате токи электродвигателя соответствуют сигналам задания.
В зависимости от знака сигнала задания момента, поступающего на вход блока 8 задания тока, фаза токов в обмотках меняется на 180°, при этом меняется знак электромагнитного момента на валу электродвигателя 1.
При рассогласовании между заданным и действительным угловыми положениями вала появляется электромагнитный момент электродвигателя соответствующего знака, приводящий к отработке этого рассогласования.
При работе электропривода с большими скоростями ЭДС вращения электродвигателя становится сравнимой с силовым питающим напряжением, при этом уменьщает- ся динамический запас по напряжению, в результате чего появляются ощибки по току, приводящие к нарущению симметрии статорных токов и возникновению «паразитных асинхронных моментов, что вызывает снижение точности управления.
Для устранения перечисленных явлений ошибки по току измеряются на выходе блока 5 элементов сравнения. В случае появления хотя бы в одном из контуров тока ошибки, превышающей зону нечувствительности, срабатывает соответствующий компаратор в блоке 12 релейных элементов с зоной нечувствительности и через выпрямитель 13 выдает сигнал на вход логического сумматора 14, выходной сигнал которого снижает уровень насыщения ограничителя 10 напряжения до такой величины, при которой ощибки по току отсутствуют даже при максимальной скорости привода. Если скорость привода меньще максимальной, то логический сумматор 14 (при быстрых изменениях управляющего напряжения регулятора угла 11) работает в режиме щнротно-импульсной модуляции, причем средний уровень насыщения ограничителя 10 является таким, что ошибки по току отсутствуют и соблюдается симметрия статорных токов двигателя.
Таким образом, электропривод упрощается, так- как для устранения дополнительных динамических ощибок при регулировании в широком диапазоне скоростей не требуется использования датчика скорости, расположенного на валу двигателя. Кроме того, повышается надежность работы электропривода, так как устраняется чувствительность к изменению силового питающего напряжения и не требуется точной подстройки параметров системы управления под параметры силовой части.
Формула изобретения
Электропривод, содержащий синхронный электродвигатель, выпрямитель, датчик угла, механически связанный с синхронным электродвигателем, подключенным через усили- тель мощности к выходу релейного регулятора токов, состоящего из последовательно соединенных блока элементов сравнения и блока релейных элементов с гистерезисом, вычитающий вход блока элемен- тов сравнения подключен к выходу датчика токов, вход которого соединен с выходом усилителя мощности, суммирующий вход блока элементов сравнения соединен с выходом блока задания токов, один вход которого подключен к выходу датчика угла, а другой вход через инерционное звено сое
динен с выходом ограничителя напряжения с силовым и управляющим входами, регулятор угла с суммирующим и вычитающим входами, вычитающими вход регулятора угла подключен к выходу датчика угла, отличающийся тем, что с целью упрощения и повыщения надежности, в него введены логический сумматор и блок, релейных элементов с зоной нечувствительности, вход которого подключен к выходу блока элементов сравнения, а выход через последовательно соединенные выпрямитель и логический сумматор подключен к управляющему входу ограничителя напряжения, силовой вход которого соединен с выходом регулятора угла, суммирующий вход которого предназначен для подачи сигнала задания.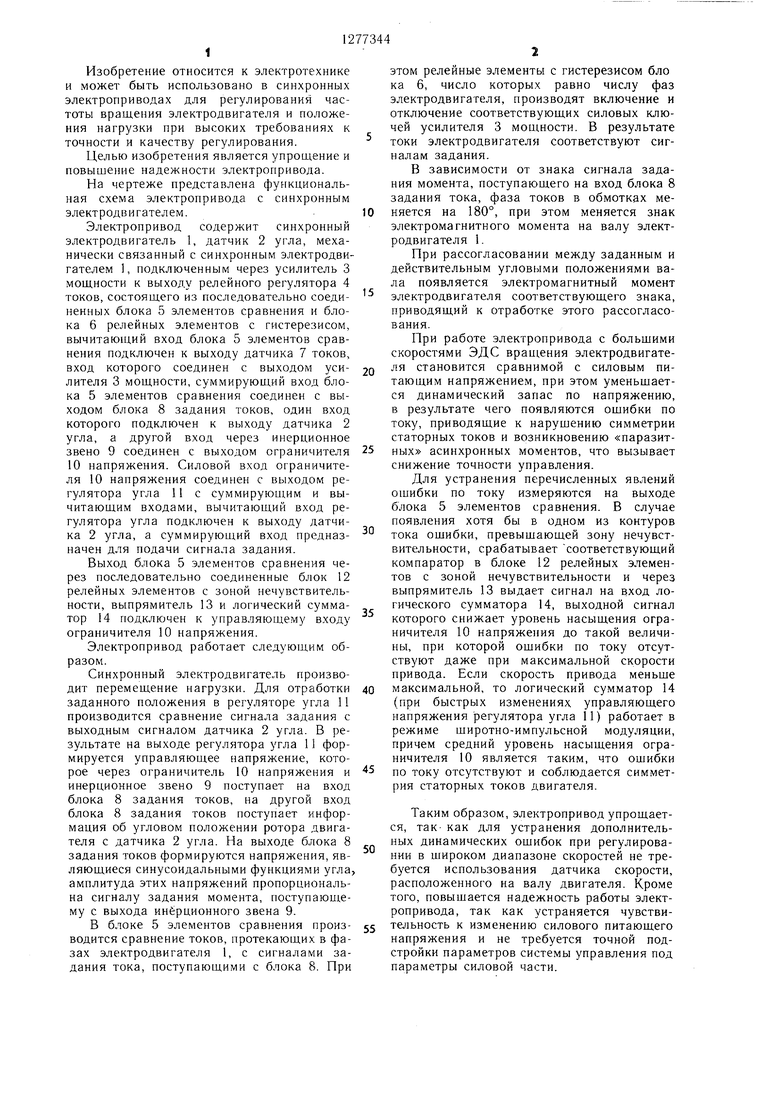
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод | 1983 |
|
SU1112520A1 |
| Многодвигательный электропривод | 1990 |
|
SU1734185A1 |
| Электропривод переменного тока | 1986 |
|
SU1332506A1 |
| Вентильный электропривод | 1983 |
|
SU1234940A1 |
| ЭЛЕКТРОПРИВОД | 1991 |
|
RU2025035C1 |
| Электропривод | 1983 |
|
SU1170575A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| Электропривод переменного тока | 1985 |
|
SU1275732A1 |
| ПРЕЦИЗИОННАЯ СИСТЕМА РЕГУЛИРОВАНИЯ ТОКА ЭЛЕКТРОДВИГАТЕЛЯ | 1997 |
|
RU2123756C1 |
| Следящий электропривод | 1991 |
|
SU1833828A1 |
Изобретение относится к электротехнике и может быть использовано в синхронных электроприводах для регулирования частоты вращения электродвигателя и положения нагрузки при высоких требованиях к точности и качеству регулирования. Целью изобретения является упрощение и повышение надежности электропривода. Указанная цель достигается за счет того, что для устранения дополнительных динамических ощибок при регулировании в широком диапазоне скоростей не требуется использования датчика скорости, расположенного на валу двигателя, а повьинение надежности работы электропривода достигается за счет того, что устраняется чувствительность к изменению силового питающего напряжения и не требуется точной подстройки параметров системы управления под параметры силовой части. Электропривод содержит синхронный электродвигатель 1, датчик 2 угла, усилитель 3 мощности, подключенный выходом через датчик 7 тока к электродвигателю 1, а входом - к выходу релейного регулятора 4 токов, содержащего последовательно включенные блок 5 элементов сравнения и блок 6 релейных элементов с гистерезисом, последовательно соединенные блок 8 задания токов, инерционное звено 9, ограничитель 10 напряжения, регулятор 11 угла, вычитающий вход которого объединен со вторым входом блока 8 задания токов и подключен к выходу датчика 2 угла. Выход блока 5 элементов сравнения через последовательно соединенные блок 12 релейных элементов с зоной нечувствите.:1ьности, выпрямитель 13 и логический сумматор 14 подключен к управляющему входу ограничителя 10 направления. Выход датчика 7 тока подключен к вычитающему входу блока 5 элементов сравнения. 1 ил. (О (Л ьо со NU 4::

| Боченков Б | |||
| Al., Шраменко С | |||
| Г | |||
| Бесконтактные электроприводы с широким диапазоном регулирования | |||
| Электромеханические системы воспроизведения движения и их элементы | |||
| - Межвузовский сборник научных трудов | |||
| Новосибирск.: НЭТИ | |||
| Приспособление для изготовления в грунте бетонных свай с употреблением обсадных труб | 1915 |
|
SU1981A1 |
| Электропривод | 1983 |
|
SU1112520A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
