Изобретение относится к станкостроению и может быть использовано в системах управления станков, промышленных роботов и другого оборудования, требующих регулирования скорости перемещения,
Целью изобретения является повышение быстродействия и надежности электропривода.
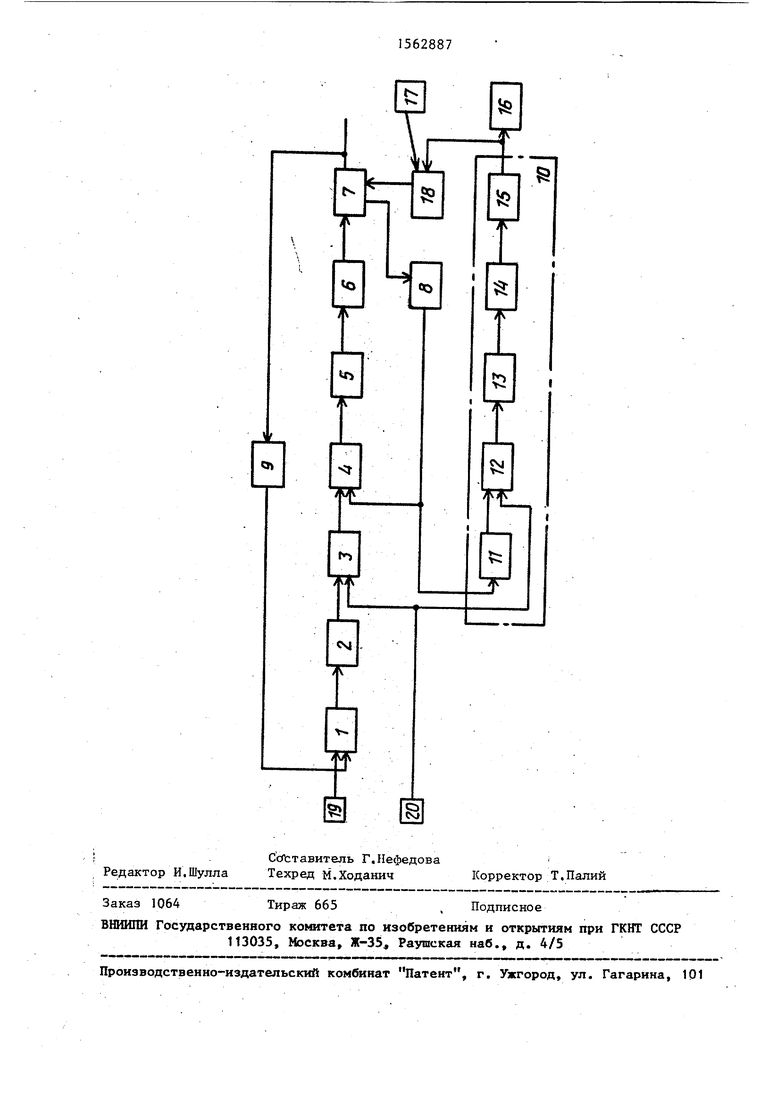
На чертеже приведена структурная схема следящего электропривода.
На схеме показаны второй сумматор ), регулятор 2 скорости, усилитель- ограничитель 3, первый сумматор 4, регулятор 5 тока, усилитель 6 мощности, исполнительный электродвигатель 7, датчик 8 тока датчик 9 скорости, устройство Ю защиты, блок 11 определения модуля, третий сумматор 12, первый пороговый блок 13, интегратор 14, второй пороговый блок 15, индикатор 16 источник 17 питания, кпюч 18,
Задатчик 19 скорости, блок 20 управления уровнем ограничения.
Следящий привод работает следующим образом,
Сигнал задания скорости с выхода задатчика 19 скорости поступает на второй вход второго сумматора 1, на Первый (инверсный) вход которого поступает сигнал с выхода датчика 9 ско- 0ости. Алгебраическая сумма сигналов Поступает на вход регулятора 2 скоро- Јти, выходной сигнал которого поступает на первый информационный вход усилителя-ограничителя 3, на управ- Яяющий вход - сигнал управления уровнем ограничения, величина которого устанавливается в зависимости от Величины сигнала на управляющем входе. Выходной сигнал усилителя-ограни- чителя 3 поступает на второй вход первого сумматора 4, на первый (инверсный) вход которого поступает сиг- Нал с выхода датчика 8 тока. Выходной сигнал первого сумматора 4 через ре- гулятор 5 тока и усилитель 6 мощности подается на исполнительный электродвигатель 7, с электрического выхода которого сигнал поступает на датчик 8 тока, образуя обратную связь по току.
На вход устройства 10 защиты тупает сигнал с выхода датчика 8 тока. В нем в блоке 11 определения модуля выделяется модуль тока электродвигателя 7 с выхода блока 11 опре- чделения модуля сигнал поступает на первый вход третьего сумматора 12, на второй вход которого поступает сигнал управления уровнем ограничения. Выходной сигнал третьего сумма тора 12 поступает на вход порогового блока 13, а при превышении его заданного порогового уровня сигнал с его выхода - на вход интегратора 14. Если величина сигнала, поступающая на вход интегратора 14, остается постоянной или увеличивается, то через определенное время срабатывает второй пороговый блок 15, выходной сигнал
которого с помощью ключа 18 отключает источник 17 питания от входа Питание электродвигателя 7 и включает индикатор 16,
В качестве задатчика 19 скорости и блока 20 управления уровнем ограни- чения могут быть использованы любые внешние для предлагаемого привода
системы и устройства, в качестве ис-. полнительного электродвигателя - электродвигатель постоянного тока. В качестве регуляторов скорости 2 и тока 5 могут быть применены ПИ- и ПИД- блоки.
Указанные отличительные особенности предлагаемого электропривода обеспечивают повышение быстродействия за счет реализации управления максимальным моментом, повышение надежности за счет автоматизации режима работы электронного теплового реле, а также автоматизацию переналадки, уни- версализ ацию электропривода (управление гаммой1 двигателей), возможность управлять максимальным усилием сборочных роботов.
Формула
и з
обретения
Следящий электропривод, содержащий последовательно соединенные первый сумматора, регулятор тока, усилитель мощности и исполнительный электродвигатель, вход Питание которого соединен с выходом ключа, электрический выход которого через датчик тока соединен с входом блока определения модуля и с первым входом первого сумматора, а вал которого через датчик скорости подключен к первому входу второго сумматора, соединенного вторым входом с выходом задатчика, а выходом - с входом регулятора скорости, и последовательно соединенные первый пороговый блок, интегратор и второй пороговый блок, подключенный выходом к входу индикатора и к управляющему входу ключа, соединенного информационным входом с выходом источника питания, отличающийся тем, что, с целью повышения быстродействия и надежности электропривода, в него дополнительно введены усилитель- ограничитель, блок управления уровнем ограничения и третий сумматор, соединенный выходом с входом интегратора, .первым входом - с выходом блока определения модуля, а вторым входом - с выходом блока управления уровнем ограничения и с управляющим входом усилителя-ограничителя, подключенного информационным входом к выходу регулятора скорости, а выходом - к второму входу первого сумматора.
.Т
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулируемый электропривод угольного комбайна | 1989 |
|
SU1795096A1 |
| Электропривод постоянного тока | 1984 |
|
SU1226600A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| Реверсивный электропривод постоянного тока | 1989 |
|
SU1598094A1 |
| Следящий электропривод | 1987 |
|
SU1409968A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Устройство для управления асинхронным электродвигателем | 1990 |
|
SU1791952A1 |
| Электропривод постоянного тока с двухзонным регулированием скорости валков клети прокатного стана | 1986 |
|
SU1411911A1 |
| Устройство для управления асинхронным электроприводом | 1990 |
|
SU1830609A1 |
| Способ управляющей электродвигателем буровой лебедки и устройство для его осуществления | 1989 |
|
SU1705994A1 |
Следящий привод относится к станкостроению и может быть использован в системах управления станков, промышленных роботов и другого оборудования, требующего регулирования скорости перемещения. Целью изобретения является повышение быстродействия и надежности электропривода. Привод выполнен по двухконтурной схеме, внешний контур которой является контуром регулирования скорости, а внутренний - контуром регулирования тока, и имеет устройство защиты по току электродвигателя, содержащее блок определения модуля, первый пороговый блок, интегратор и второй пороговый блок и осуществляющее включение индикатора и отключение источника питания от электродвигателя. Поставленная цель достигается за счет того, что между выходом контура регулирования скорости и входом регулирования тока установлен усилитель-ограничитель с управляемым уровнем ограничения, а в устройстве защиты между блоком определения модуля и первым пороговым блоком установлен сумматор, на второй вход которого и на управляемый вход усилителя-ограничителя подается сигнал управления уровнем ограничения. 1 ил.
| Устройство для управления электроприводом промышленного робота | 1985 |
|
SU1265691A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Промышленные роботы и опыт их применения в народном хозайстве | |||
| Под ред | |||
| В.М.Николаева и Н.Н.Довбни | |||
| - Л.: Ленинградский дом научно-технической пропаганды, 1988, с | |||
| Приспособление для автоматической односторонней разгрузки железнодорожных платформ | 1921 |
|
SU48A1 |
| Розман Я.Б., Брейер Б.З | |||
| Устройства, наладка и эксплуатация электроприводов металлорежущих станков, - М.: Машиностроение, 1985, с | |||
| Спускная труба при плотине | 0 |
|
SU77A1 |
