Изобретение относится к металлообрабатывающей пром1 гашенностн и может быть использовано в металлорежущих станках, промышленных роботах и других установках, требующих регулирования скорости перемещения исполнительных органов.
Цель изобретения - повышение качества управления системы,
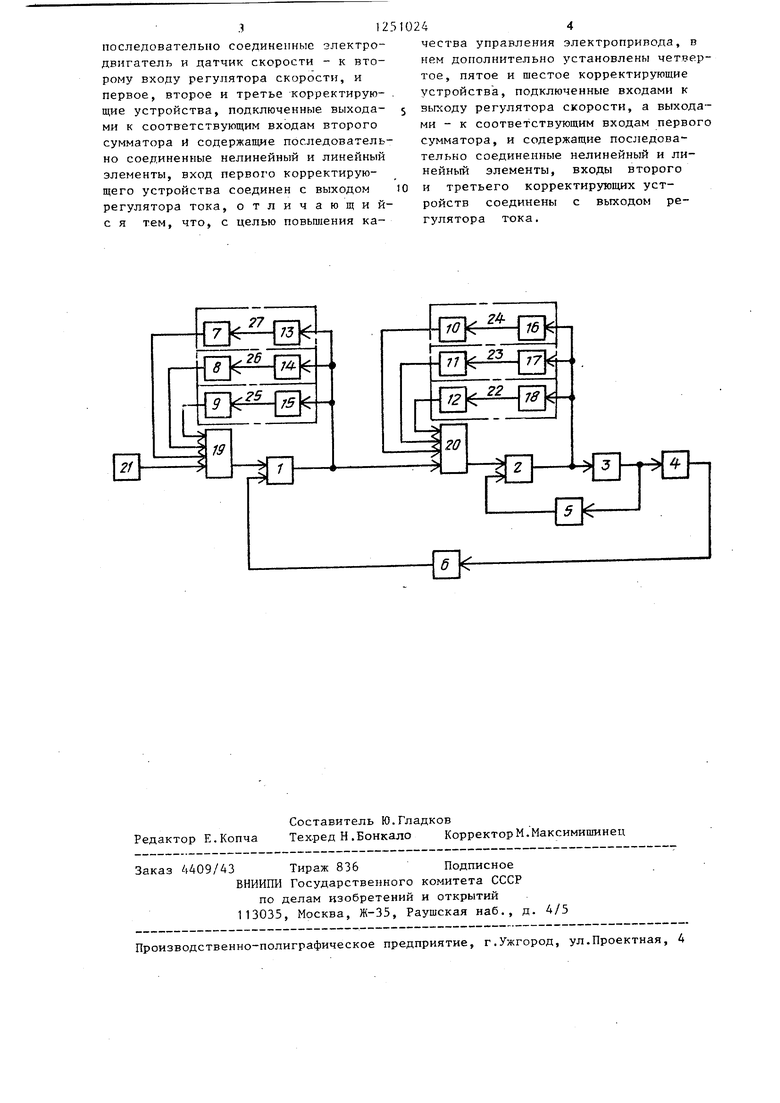
На чертеже изображена структурная схема электропривода. На схеме позициями o6o3Ha4eHHj регулятор 1 скорости, регулятор 2 тока, усилитель 3 мощности, электродвигатель 4, датчики тока 5 и скорости 6, л тнейные элементы 7-12, нелинейные элементы 13-18 первый 19 и второй 2СГ сумматоры, задатчик 21, первое 22, второе ИЗ, третье 24, четвертое 25, пятое 26 и шестое 27 корректирующие устройства.
Корректирующее устройство 22 содержит линейный 12 и нелинейный 18 элементы, корректирующее устройство
23-линейный 11 и нелинейный 17 элементы, корректирующее устройство
24- линейный 10 и нелинейный 16 элементы, корректирующее устройство
25 линейный 9 и нелинейный 13 элементы, корректирующее устройство
26- линейный 8 и нелинейный 14 элементы, корректирующее устройство
27- линейный 7 и нелинейный 13 элементы.
В качестве нелинейных элементов 13-18 могут быть применены, например, нелинейные элементы, обладающие зоной нечувствительности. Эти нелинейные элементы отличаются друг от друга лишь параметрами зон нечувствительности .
В качестве линейных элементов 7- 12 могут быть применен линейные элементы, описываемые передаточными функциями следующего вида:
р) ffr где К, Т, и соответственно коэф- 50 формула изобретения фициенты усиления, первая и вторая постоянные времени линейного элемента; р - оператор Лапласа. Эти линейные элементы отличаются друг .от друга величинами параметров t 1
Следящий электропривод, содержащий последовательно соединенные задатчик, первый сумматор, регулятор 55 скорости, второй сумматор, регулятор тока и усилитель мощности, подключен- ньй выходом через датчик тока к вто- рому входу регулятора тока, а через
В общем случае в обратных связях каждого из регуляторов скорости 1 и тока 2 могут быть установлены m ука- занных корректирующих устройств.
Система работает следующим образом.
Сигнал с выхода задатчика 21 через первый сумматор 19 поступает на первый вход регулятора 1 скорости,
в котором сравнивается с выходным сигналом датчика 6 скорости и соответствующим образом преобразуется. Выходной сигнал регулятора 1 скорости через второй сумматор 20 поступает
на первый вход регулятора 2 тока, в котором алгебраически суммируется с выходным сигналом датчика 5 тока. Вы- ходной сигнал регулятора 2 тока преобразуется в усилителе 3 мощности и
-воздействует на электродвигатель 4, меняя скорость вращения его вала. Ток и скорость вращения электродвигателя регистрируются датчиками тока 5 и скорости 6.
Как тол ько выходной сигнал регулятора 1 скорости или выходной сигнал регулятора 2 тока увеличиваются до такой степени, что превышают зоны нечувствительностей нелинейных
элементов 13-18, корректирующих устройств 22-27, то они проходят с выходов регуляторов скорости 1 и тока 2 через соответствующие нелинейные и линейные элементы корректирующих устройств на соответствующие входы первого 19 и BTdporo 20 сумматоров, меняя тем самым результирующие функции регуляторов скорости 1 и тока 2.
Изобретение позволяет примерно в восемь раз повысить показатели, характеризующие качество управления следящего привода, например, повысить запасы устойчивости по модулю и по фазе, уменьшить максимальную установившуюся ошибку, увеличить динамическую и статическую точности, у еньшить колебательность и повысить быстродействие.
50 формула изобретения
Следящий электропривод, содержащий последовательно соединенные задатчик, первый сумматор, регулятор 55 скорости, второй сумматор, регулятор тока и усилитель мощности, подключен- ньй выходом через датчик тока к вто- рому входу регулятора тока, а через
последовательно соединенные электродвигатель и датчик скорости - к второму входу регулятора скорости, и первое, второе и третье корректирующие устройства, подключенные выхода- ми к соответствующим входам второго сумматора и содержащие последовательно соединенные нелинейный и линейный элементы, вход первого корректирующего устройства соединен с выходом регулятора тока, отличаю щи й- с я тем, что, с целью повьпиения качества управления электропривода, в нем дополнительно установлены четвертое, пятое и шестое корректирующие устройства, подключенные входами к выходу регулятора скорости, а выходами - к соответствующим входам первого сумматора, и содержащие последовательно соединенные нелинейный и линейный элементы, входы второго и третьего корректирующих устройств соединены с выходом регулятора тока.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий электропривод | 1987 |
|
SU1409968A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД НЕПОСРЕДСТВЕННОГО УПРАВЛЕНИЯ С АДАПТИВНЫМИ СВОЙСТВАМИ | 2008 |
|
RU2368932C1 |
| Следящий электропривод | 1986 |
|
SU1361694A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД С НЕПОСРЕДСТВЕННЫМ УПРАВЛЕНИЕМ | 2002 |
|
RU2233464C2 |
| Следящий электропривод | 1988 |
|
SU1562887A1 |
| Следящий электропривод | 1986 |
|
SU1363132A1 |
| Устройство для управления позиционным электроприводом | 1981 |
|
SU993199A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ С ФРИКЦИОННОЙ НАГРУЗКОЙ | 1992 |
|
RU2079961C1 |
| Следящий электропривод | 1990 |
|
SU1764031A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И ЭЛЕКТРОПРИВОД | 2007 |
|
RU2361355C1 |
Изобретение относится к области металлообрабатывающей промышленности и может быть использовано в металлорежущих станках, пррмьшшенных роботах и других установках, требующих регулирования скорости перемещения испол-. нительных органов. Повышение всех показателей качества управления элек- . тропривода достигается за счет переключения нелинейных обратных связей регуляторов скорости и тока. Выходной сигнал задатчйка через первый сумматор, регулятор скорости, второй сум-, матор, регулятор тока и усилитель мощности воздействует на электродвигатель. Ток и скорость вращения вала электродвигателя фиксируются датчи- . ками тока и скорости, выходные сигналы которых подаются на вторы е входы регуляторов тока и скорости. Выход регулятора скорости соединен с соот ветствующим входом первого сумматора через три параллельно соединенных корректирующих устройства. Выход регулятора тока соединен с соответствующим входом второго сумматора через три параллельно включенных кор- ректирующих устройства. Каждое из указанных корректирующих устройств состоит из последовательно соединенных нелинейного элемента с зоной не- чувствительности и линейного элемен- g та. В зависимости от величины выходных сигналов регуляторов скорости и тока их выходные сигналы через соответствующие корректирующие входы поступают на со ответствующие входы пер- вого и BTopoi o сумматоров. 1 ил. J
| Елисеева В.А | |||
| и др | |||
| Справочник по автоматизированному электроприводу | |||
| М.: Энергоатомиздат, 19.83, с.336 | |||
| Система управления электроприводом | 1977 |
|
SU634229A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Нелинейные корректирующие устройства в системах автоматического управления | |||
| /Под ред | |||
| Ю.И.Топчеева | |||
| М.: Машиностроение, с.264-269, с.25 | |||
