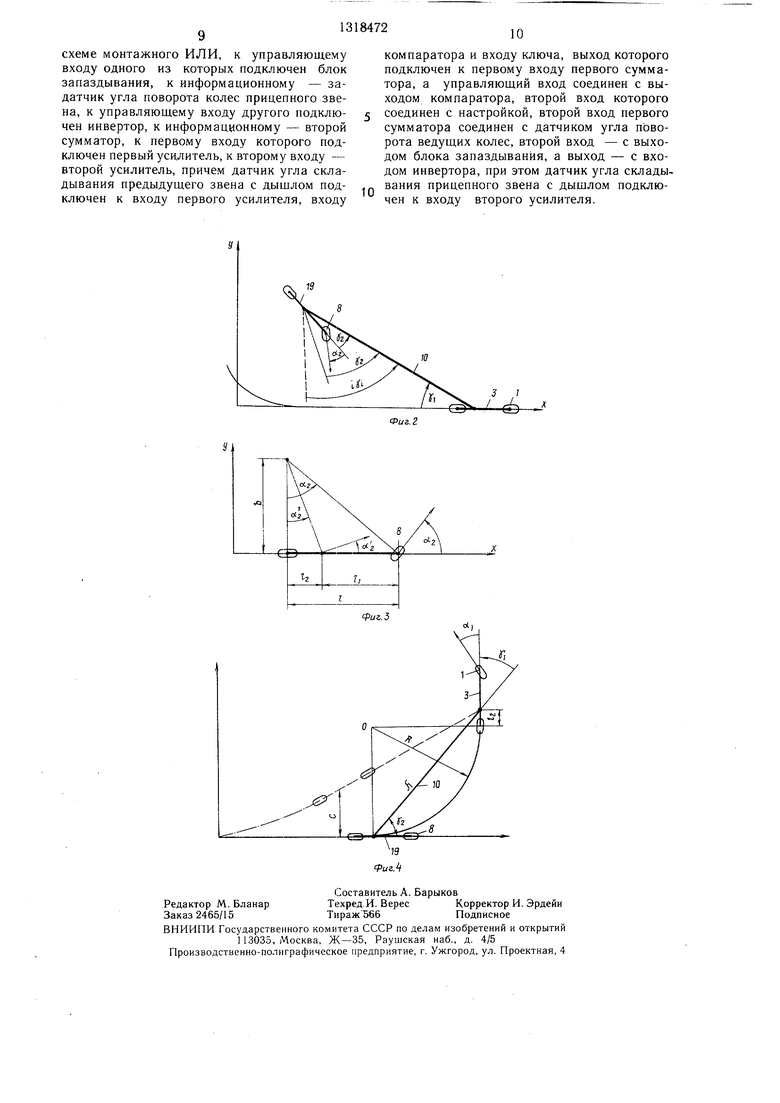
участке пути прицепными звеньями, управление которыми на поворотах осуществляется в зависимости от положения предыдущего звена, с которым прицепное звено связано соединительной рамой или дыщлом. Цель изобретения - повыщение надежности в работе путем повышения точности выставления звеньев вдоль одной прямой при движении транспортного средства по прямолинейному участку пути. Устройство содержит датчик 18 угла складывания прицепного звена с соединительной рамой 10 (дыщлом), связывающей его с предыдущим звеном, блок запаздывания 4, два ключа 5 и 17, логический элемент НЕ 16, силовой привод 7 поворота колес прицепного звена и датчик 2 угла поворота колес предыдущего звена относительно его рамы, соединенный со входом блока запаздывания 4. Выход последнего соединен с управляющим входом первого ключа 5, сигнальный вход которого соединен с выходом системы управления 6 прицепным звеном на повороте, а выход - с силовым приводом. Выход элемента НЕ соединен с управляющим входом второго ключа 17, выход которого соединен с силовым приводом. Устройство также содержит два сумматора 15 и 21, два усилителя 11 и 20, компаратор 13, третий ключ 12 и дат1
Изобретение относится к устройствам управления курсовым движением на прямолинейном участке пути прицепных звеньев (прицепами или независимыми поворотными тележками), управление которыми на поворотах осуществляется с помощью рулевого привода в зависимости от положения предыдущего звена (тягача, прицепа или независимой поворотной тележки), с которым данное прицепное звено связано соединительной рамой или дыщлом.
Цель изобретения - повыщение надежности работы путем точности выставления звеньев вдоль одной прямой при движении транспортного средства по прямолинейному участку пути.
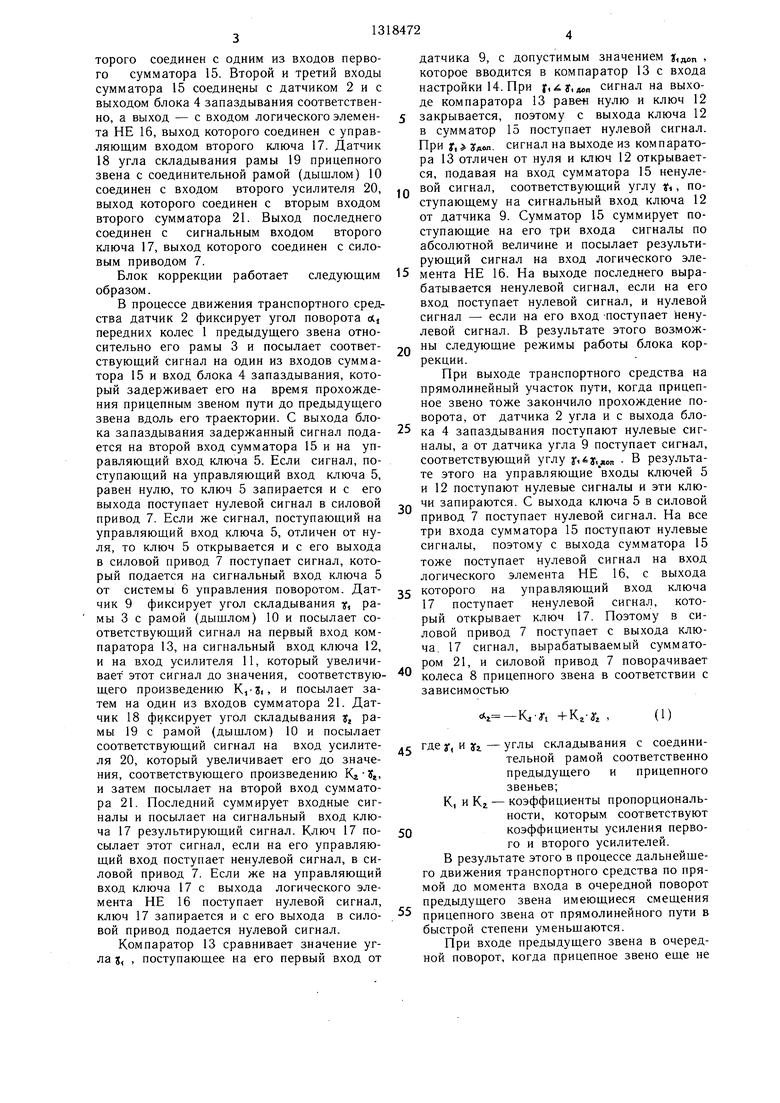
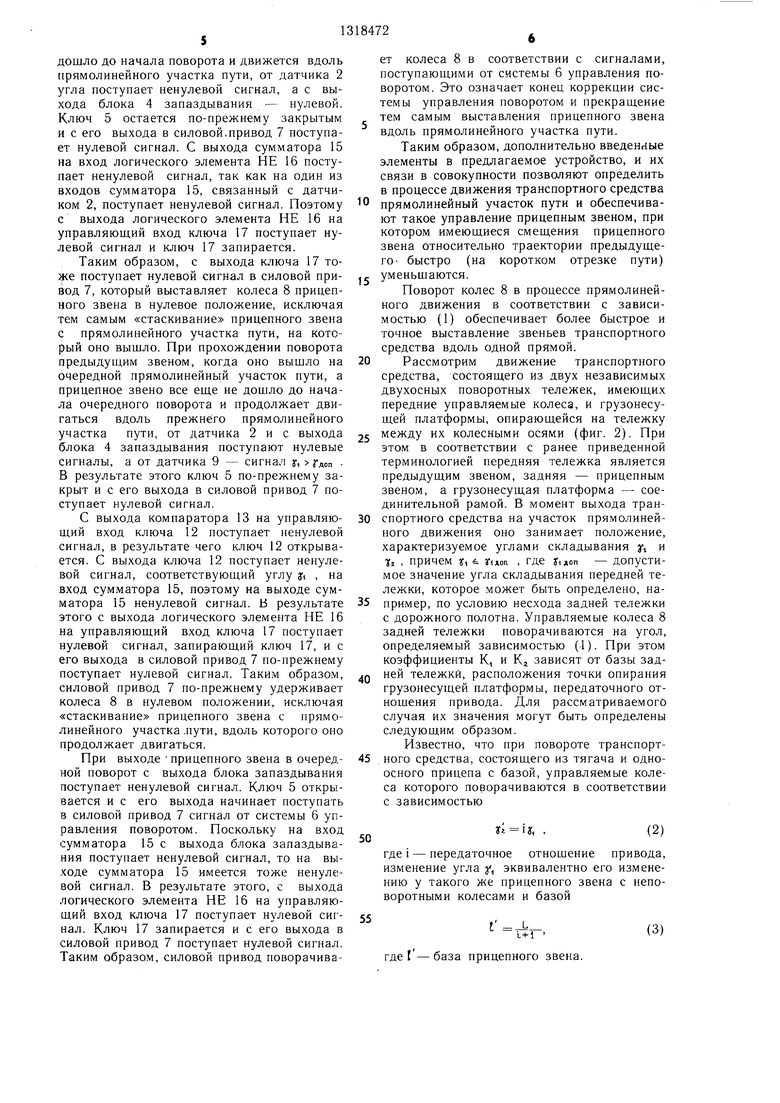
На фиг. 1 изображена функциональная блок-схема устройства управления движением прицепных звеньев безрельсового транспортного средства; на фиг. 2 - принципиальная кинематическая схема движения транспортного средства в момент выхода его на участок прямолинейного движения; на фиг. 3 - принципиальная кинематическая схема для определения углов между векточик 9 угла складывания предыдущего звена с соединительной рамой, соединенный с входом первого усилителя И, входом компаратора 13 и сигнальным входом третьего ключа 12. Выход компаратора соединен с управляющим входом третьего ключа 12, выход которого соединен с первым входом первого сумматора 15, второй и третий входы которого соединены с датчиком 2 угла поворота колес предыдущего звена и с выходом блока запаздывания 4, а выход - с входом логического элемента НЕ. Выход первого усилителя 11 соединен с одним из входов второго сумматора 21, выход которого соединен с сигнальным входом второго ключа. Датчик угла складывания прицепного звена с соединительной рамой (дыщлом) соединен с входом второго усилителя, выход которого соединен с вторым входом второго сумматора 21. Совокупность элементов и их связей позволяют определить в процессе движения транспортного средства прямолинейный участок пути и обеспечивают такое управление прицепным звеном, при котором имеющиеся смещения прицепного звена относительно траектории предыдущего быстро (на коротком отрезке пути) уменьщаются, что обеспечивает достижение поставленной цели. 4 ил.
ром скорости произвольной точки тележки и ее рамой в зависимости от угла поворота управляемых колес; на фиг. 4 - принципиальная кинематическая схема движения транспортного средства при входе его в очередной поворот при управлении известным и предлагаемым устройствами.
Цередние колеса 1 предыдущего звена соединены с датчиком 2 угла поворота этих
,, колес относительно рамы 3, соединенным с входом блока 4 запаздывания, выход которого соединен с управляющим входом первого ключа 5, сигнальный вход которого соединен с выходом системы 6 управления прицепным звеном на повороте, а выход - с
силовым приводом 7 поворота колес 8 прицепного звена. Выход датчика 9 угла складывания рамы 3 предществующего звена с соединительной рамой (дыщлом) 10 соединен с входом первого усилителя 11, с сигнальным входом третьего ключа 12 и с первым входом компаратора 13, второй вход которого соединен с входом настройки 14. Выход компаратора 13 соединен с управляющим входом третьего ключа 12, выход которого соединен с одним из входов первого сумматора 15. Второй и третий входы сумматора 15 соединены с датчиком 2 и с выходом блока 4 запаздывания соответственно, а выход - с входом логического элемента НЕ 16, выход которого соединен с управляющим входом второго ключа 17. Датчик 18 угла складывания рамы 19 прицепного звена с соединительной рамой (дышлом) 10 соединен с входом второго усилителя 20, выход которого соединен с вторым входом второго сумматора 21. Выход последнего соединен с сигнальным входом второго ключа 17, выход которого соединен с силовым приводом 7.
Блок коррекции работает следующим образом.
В процессе движения транспортного средства датчик 2 фиксирует угол поворота oij передних колес 1 предыдущего звена относительно его рамы 3 и посылает соответствующий сигнал на один из входов сумматора 15 и вход блока 4 запаздывания, который задерживает его на время прохождения прицепным звеном пути до предыдущего звена вдоль его траектории. С выхода блока запаздывания задержанный сигнал подается на второй вход сумматора 15 и на управляющий вход ключа 5. Если сигнал, поступающий на управляющий вход ключа 5, равен нулю, то ключ 5 запирается и с его выхода поступает нулевой сигнал в силовой привод 7. Если же сигнал, поступающий на управляющий вход ключа 5, отличен от нуля, то ключ 5 открывается и с его выхода в силовой привод 7 поступает сигнал, который подается на сигнальный вход ключа 5 от системы 6 управления поворотом. Датчик 9 фиксирует угол складывания -g, рамы 3 с рамой (дыщлом) 10 и посылает соответствующий сигнал на первый вход компаратора 13, на сигнальный вход ключа 12, и на вход усилителя 11, который увеличивает этот сигнал до значения, соответствующего произведению K,, и посылает затем на один из входов сумматора 21. Датчик 18 фиксирует угол складывания у рамы 19 с рамой (дышлом) 10 и посылает соответствующий сигнал на вход усилителя 20, который увеличивает его до значения, соответствующего произведению Кг З, и затем посылает па второй вход сумматора 21. Последний суммирует входные сигналы и посылает на сигнальный вход ключа 17 результирующий сигнал. Ключ 17 посылает этот сигнал, если на его управляющий вход поступает ненулевой сигнал, в силовой привод 7. Если же на управляющий вход ключа 17 с выхода логического элемента НЕ 16 поступает нулевой сигнал, ключ 17 запирается и с его выхода в силовой привод подается нулевой сигнал.
Компаратор 13 сравнивает значение угла j , поступающее на его первый вход от
датчика 9, с допустимым значением 5(,доп , которое вводится в компаратор 13 с входа настройки 14. При г,У1доп сигнал на выходе компаратора 13 равен нулю и ключ 12
закрывается, поэтому с выхода ключа 12 в сумматор 15 поступает нулевой сигнал. При у, гГд«п. сигнал на выходе из компаратора 13 отличен от нуля и ключ 12 открывается, подавая на вход сумматора 15 ненулеQ вой сигнал, соответствующий углу -у, поступающему на сигнальный вход ключа 12 от датчика 9. Сумматор 15 суммирует поступающие на его три входа сигналы по абсолютной величине и посылает результирующий сигнал на вход логического эле5 мента НЕ 16. На выходе последнего вырабатывается ненулевой сигнал, если на его вход поступает нулевой сигнал, и нулевой сигнал - если на его вход -поступает ненулевой сигнал. В результате этого возможQ ны следующие режимы работы блока коррекции.
При выходе транспортного средства на прямолинейный участок пути, когда прицепное звено тоже закончило прохождение поворота, от датчика 2 угла и с выхода бло5 ка 4 запаздывания поступают нулевые сигналы, а от датчика угла 9 поступает сигнал, соответствующий углу у.оп В результате этого на управляющие входы ключей 5 и 12 поступают нулевые сигналы и эти клю-, чи запираются. С выхода ключа 5 в силовой привод 7 поступает нулевой сигнал. На все три входа сумматора 15 поступают нулевые сигналы, поэтому с выхода сумматора 15 тоже поступает нулевой сигнал на вход логического элемента НЕ 16, с выхода
5 которого на управляющий вход ключа 17 поступает ненулевой сигнал, который открывает ключ 17. Поэтому в силовой привод 7 поступает с выхода ключа, 17 сигнал, вырабатываемый сумматором 21, и силовой привод 7 поворачивает
колеса 8 прицепного звена в соответствии с зависимостью
, , (1)
с где У, И з-г.-углы складывания с соединительной рамой соответственно предыдущего и прицепного звеньев;
К, и Кг - коэффициенты пропорциональности, которым соответствуют 0коэффициенты усиления первого и второго усилителей. В результате этого в процессе дальнейшего движения транспортного средства по прямой до момента входа в очередной поворот предыдушего звена имеющиеся смещения 5 прицепного звена от прямолинейного пути в быстрой степени уменьшаются.
При входе предыдущего звена в очередной поворот, когда прицепное звено еще не
дошло до начала поворота и движется вдоль прямолинейного участка пути, от датчика 2 угла поступает ненулевой сигнал, а с выхода блока 4 запаздывания - нулевой. Ключ 5 остается по-прежнему закрытым и с его выхода в силовой,привод 7 поступает нулевой сигнал. С выхода сумматора 15 на вход логического элемента НЕ 16 поступает ненулевой сигнал, так как на один из входов сумматора 15, связанный с датчиком 2, поступает ненулевой сигнал. Поэтому с выхода логического элемента НЕ 16 на управляющий вход ключа 17 поступает нулевой сигнал и ключ 17 запирается.
Таким образом, с выхода ключа 17 тоже поступает нулевой сигнал в силовой привод 7, который выставляет колеса 8 прицепного звена в нулевое положение, исключая тем самым «стаскивание прицепного звена с прямолинейного участка пути, на который оно вышло. При прохождении поворота предыдуш.им звеном, когда оно вышло на очередной прямолинейный участок пути, а прицепное звено все еще не дощло до начала очередного поворота и продолжает двигаться вдоль прежнего прямолинейного участка пути, от датчика 2 и с выхода блока 4 запаздывания поступают нулевые сигналы, а от датчика 9 - сигнал у, fnm В результате этого ключ 5 по-прежнему закрыт и с его выхода в силовой привод 7 поступает нулевой сигнал.
С выхода компаратора 13 на управляющий вход ключа 12 поступает ненулевой сигнал, в результате чего ключ 12 открывается. С выхода ключа 12 поступает ненулевой сигнал, соответствующий углу ji , на вход сумматора 15, поэтому на выходе сумматора 15 ненулевой сигнал. В результате этого с выхода логического элемента НЕ 16 на управляющий вход ключа 17 поступает нулевой сигнал, запирающий ключ 17, и с его выхода в силовой привод 7 по-прежнему поступает нулевой сигнал. Таким образом, силовой привод 7 по-прежнему удерживает колеса 8 в нулевом положении, исключая «стаскивание прицепного звена с прямолинейного участка .пути, вдоль которого оно продолжает двигаться.
При выходе -прицепного звена в очередной поворот с выхода блока запаздывания поступает ненулевой сигнал. Ключ 5 открывается и с его выхода начинает поступать в силовой привод 7 сигнал от системы 6 управления поворотом. Поскольку на вход сумматора 15 с выхода блока запаздывания поступает ненулевой сигнал, то на выходе сумматора 15 имеется тоже ненулевой сигнал. В результате этого, с выхода логического элемента НЕ 16 на управляющий вход ключа 17 поступает нулевой сигнал. Ключ 17 запирается и с его выхода в силовой привод 7 поступает нулевой сигнал. Таким образом, силовой привод поворачивает колеса 8 в соответствии с сигналами, поступающими от системы 6 управления поворотом. Это означает конец коррекции системы управления поворотом и прекращение тем самым выставления прицепного звена вдоль прямолинейного участка пути.
Таким образом, дополнительно введенные элементы в предлагаемое устройство, и их связи в совокупности позволяют определить в процессе движения транспортного средства
прямолинейный участок пути и обеспечивают такое управление прицепным звеном, при котором имеющиеся смещения прицепного звена относительно траектории предыдущего быстро (на коротком отрезке пути)
г уменьшаются.
Поворот колес 8 в процессе прямолинейного движения в соответствии с зависимостью (1) обеспечивает более быстрое и точное выставление звеньев транспортного средства вдоль одной прямой.
0 Рассмотрим движение транспортного средства, состоящего из двух независи.мых двухосных поворотных тележек, имеющих передние управляемые колеса, и грузонесу- щей платформы, опирающейся на тележку
5 между их колесными осями (фиг. 2). При этом в соответствии с ранее приведенной терминологией передняя тележка является предыдущим звеном, задняя - прицепным звеном, а грузонесущая платформа - соединительной рамой. В момент выхода тран0 спортного средства на участок прямолинейного движения оно занимает положение, характеризуемое углами складывания j-i и ft , причем у, i у,оп , где у,доп допустимое значение угла складывания передней тележки, которое может быть определено, например, по условию несхода задней тележки с дорожного полотна. Управляемые колеса 8 задней тележки поворачиваются на угол, определяемый зависимостью (1). При этом коэффициенты К, и Кг зависят от базы задQ ней тележки, расположения точки опирания грузонесущей платформы, передаточного отношения привода. Для рассматриваемого случая их значения могут быть определены следующим образом.
Известно, что при повороте транспорт5 ного средства, состоящего из тягача и одноосного прицепа с базой, управляемые колеса которого поворачиваются в соответствии с зависимостью
50
3rz iy, ,
(2)
где 1 - передаточное отношение привода, изменение угла у, эквивалентно его изменению у такого же прицепного звена с неповоротными колесами и базой
L
I, -;J-
1+1
(3)
где I - база прицепного звена.
У такого прицепного звена с базой I угол у, уменьшается до величины 5% от исходной на прямолинейном отрезке пути длиной 31. Следовательно, если поворотом управляемых колес 8 задней тележки обеспечить угол Yi между соединительной рамой и вектором скорости в точке опирания рамы на заднюю тележку в соответствии с зависимостью (2), то угол -у,, а следовательно, и смещения устраняются на прямолинейном пути длиной 31.
При повороте управляемых колес 8 прицепного звена на угол г (фиг. 3) угол между вектором скорости в любой точке этого звена и его рамой определяется из следующих соотнощений:
ь тЬгг- Фгде b - радиус поворота задних колес тележки.
Приняв правые части соотнощений (4) и (5) и проведя несложные преобразования, получают
- ti
tg-4 f tgd4
или
i arctg( tg А;)
Но как видно из фиг. t-Jl Тогда
г Crctg | tg()
или учитывая условие (2)
г arctg | tg(y,-is;).(8)
Учитывая, что максимальные значения, и Гг после выхода транспортного средства на прямую малы, значения тангенсов можно заменить самими углами. Тогда выражение (8) преобразуется к виду
()(9)
Сравнивая выражения (9) и (1) получают
(10) I
t.
К - -,1 .
к,- 1-,
(И)
Таким образом, коэффициент Kj определяется конструктивными параметрами транспортного средства и может быть выбран совершенно однозначно. Величина передаточного отношения i, входящего в коэффициент KI , может быть определена следующим образом.
10
15
Пусть в момент выхода на прямолинейный участок прицепное звено имеет максимально допустимое смещение Сдоп и, следовательно, максимально допустимый угол доп и повернуто на максимально допустимый угол в сторону от направления прямолинейного движения. Максимально допустимые значения у,доп и «гдоп могут быть заданы, например, по условиям несхода колес прицепного звена с дорожного полотна.
Из выражения (3) видно, что для умень- щения Г и, следовательно, уменьщения пути для устранения смещения, необходимо увеличивать передаточное отнощение i.
Очевидно, что максимальная величина i может быть определена из условия, что в рассматриваемом крайнем допустимом положении транспортного средства управляемые колеса прицепного звена должны быть по- 20 вернуты на максимально возможный угол. Тогда выражение (9) принимает вид
- (Угдоя -1м«.кс JCiflwi.)
25 откуда
У ДСПt
Jiflon
Ll tn«.HC f TiAon
(12)
30
Подсчитав значение i по (12) и подставив в (10) получают значение К,.
Формула изобретения
Устройство управления движением прицепных звеньев безрельсового транспортного средства, содержащее датчик угла по35 ворота ведущих колес, блок запаздывания, коммутатор, силовой привод колес прицепного звена, датчик угла складывания прицепного звена с дыщлом, задатчик угла поворота колес прицепного звена, причем дат40 чик угла поворота ведущих колес подключен через блок запаздывания к управляющему входу коммутатора, к первому информационному входу подключен задатчик угла поворота колес прицепного звена, к второму информационному входу подключен датчик
45 угла складывания прицепного звена с дыщлом, а выход коммутатора подключен к силовому приводу колес прицепного звена, отличающееся тем, что, с целью повыще- ния надежности работы путем повыщения точности выставления прицепных звеньев вдоль одной прямой при движении транспортного средства по прямолинейному участку пути, устройство дополнительно снабжено датчиком угла складывания предыдущего звена с дыщлом, компаратором,
55 ключом и первым сумматором, инвертором, первым усилителем, вторым усилителем, вторым сумматором, а коммутатор содержит два ключа, соединенных выходами по
50
схеме монтажного ИЛИ, к управляющему входу одного из которых подключен блок запаздывания, к информационному - за- датчик угла поворота колес прицепного звена, к управляющему входу другого подключен инвертор, к информационному - второй сумматор, к первому входу которого подключен первый усилитель, к второму входу - второй усилитель, причем датчик угла складывания предыдущего звена с дыщлом подключен к входу первого усилителя, входу
компаратора и входу ключа, выход которого подключен к первому входу первого сумматора, а управляющий вход соединен с выходом компаратора, второй вход которого соединен с настройкой, второй вход первого сумматора соединен с датчиком угла поворота ведущих колес, второй вход - с выходом блока запаздывания, а выход - с входом инвертора, при этом датчик угла складывания прицепного звена с дыщлом подключен к входу второго усилителя.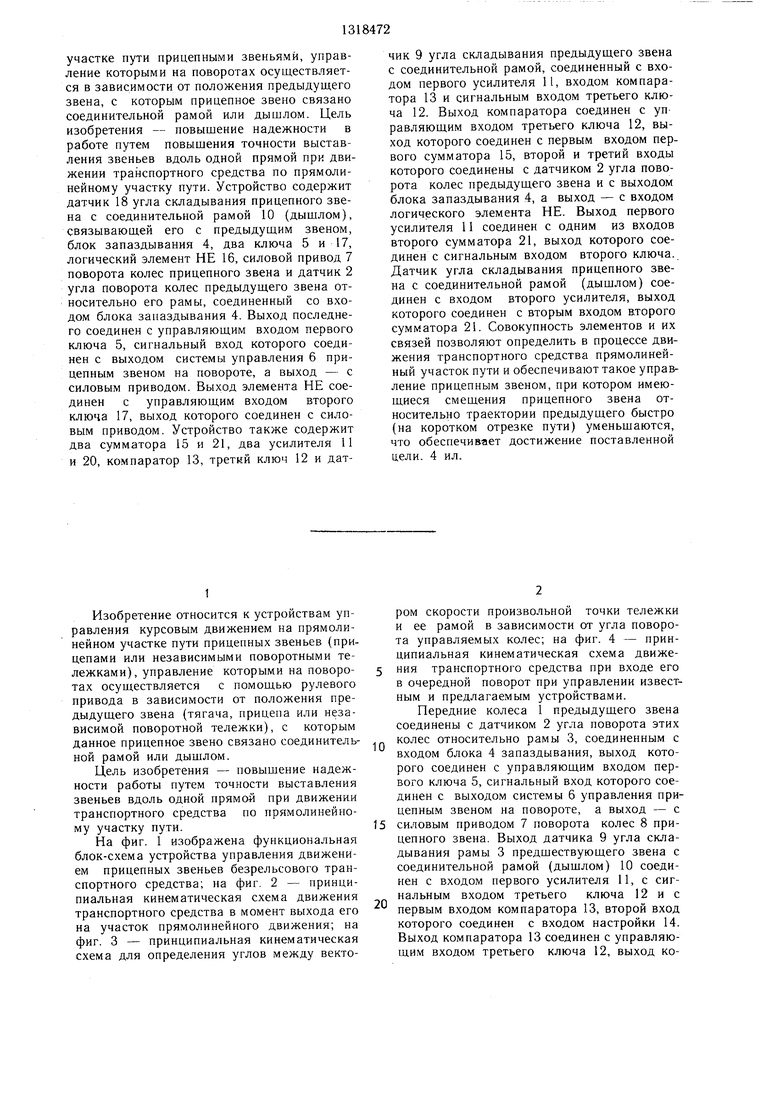

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления поворотом ведомого звена автопоезда | 1985 |
|
SU1311989A1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ МНОГОЗВЕННОГО ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1996 |
|
RU2096230C1 |
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ КОЛЕСАМИ ПРИЦЕПНОГО ЗВЕНА АВТОПОЕЗДА | 1991 |
|
RU2033361C1 |
| Устройство для управления поворотом транспортного средства | 1982 |
|
SU1093595A1 |
| Устройство для автоматической блокировки вертикального шарнира сцепки тягача с прицепным звеном | 1987 |
|
SU1411203A1 |
| УСТРОЙСТВО «СКЛАДЫВАНИЯ» БУКСИРНОГО ДЫШЛА ТРАНСПОРТНОГО СРЕДСТВА | 1973 |
|
SU408834A1 |
| Устройство для управления поворотом ведомых звеньев автопоезда | 1976 |
|
SU652019A1 |
| Устройство для управления колесами звеньев автопоезда | 1980 |
|
SU867756A1 |
| Устройство для управления поворотом транспортного средства | 1977 |
|
SU660883A1 |
| Система для управления колесами прицепного звена автопоезда | 1990 |
|
SU1761576A1 |
Изобретение откосится к области автомобилестроения, в частности к управлению курсовым движением на прямолинейном со СХ) 4 tsD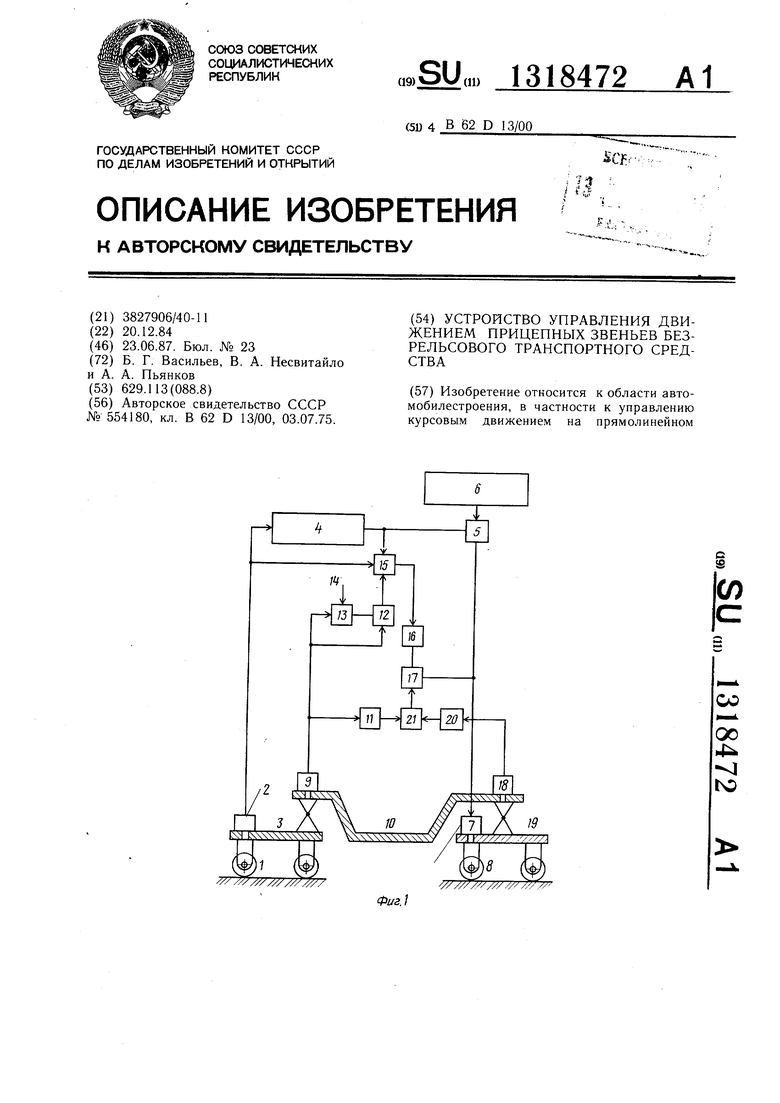
Составитель А. Барыков
Редактор М. БланарТехред И. ВересКорректор И. Эрдейи
Заказ 2465/15Тираж 566Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
1 13035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Рулевое управление прицепных звеньев безрельсового транспортного средства | 1975 |
|
SU554180A1 |
| Способ крашения тканей | 1922 |
|
SU62A1 |
