t1
Изобретение относится к высокоточным системам автоматического управления и может быть использовано в следящих системах с люфтом в механической передаче.
Целью изобретения является повышение точности следящей системы с люфтом.
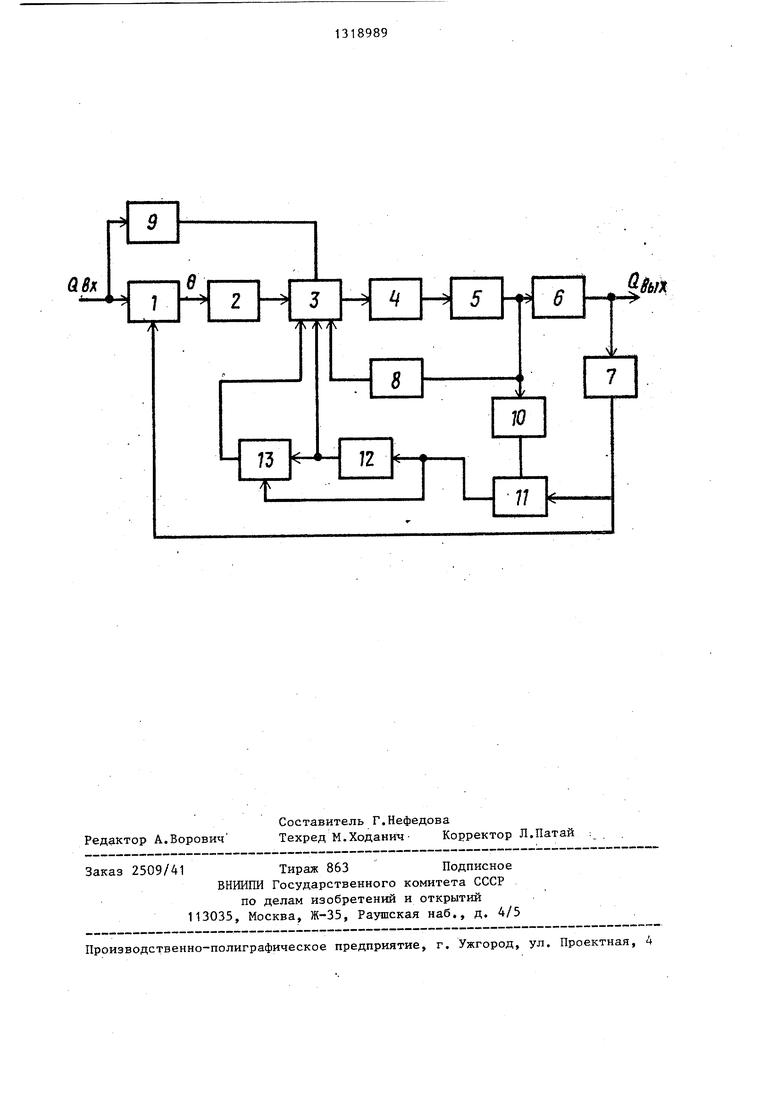
На чертеже показана функциональная схема системы.
Система содержит измеритель 1 рассогласования, первый усилитель 2, первый сумматор 3, второй усилитель 4, испольнительньй двигатель 5, редуктор 6, блок 7 обратной связи, блок 8 скоростной обратной связи, первый дифференциатор 9, интегратор 10, второй сумматор 11, второй дифференциатор 12 и регулируемьй ограничитель 13.
Комбинированная следящая система работает следующим образом. На выходе измерителя 1 рассогласования при сравнении входного сигнала бвх выходного сигнала 0, , прошедшего через блок 7 обратной связи, образуется сигнал ошибки в . Управляющий сигнал формируется на вьпсоде первого сумматора 3 при суммировании усиленного первым усилителем 2 сигнала ошибки и сигнала скоростной отрицательной обратной связи с выхода блока 8 скоростной обратной связи и сигнала с выхода первого дифференциатора 9, вводимого для компенсации динамической ошибки следящей системы. Полученный управляющий сигнал с выхода первого сумматора 3 через второй усилитель 4 подается на вход исполнительногб двигателя 5. Редуктор 6 приводится в движение исполнительным двигателем 5, Уменьшение ошибки от люфта происходит следующим образом. С no- Мощью интегратора 10 и второго сумматора 11 измеряется текущая величина люфта, и сигнал, пропорциональный этой величине, формируется на выходе второго 11 сумматора. С помощью дифференциатора 12 определяется величина, пропорциональная скорости изменения люфта и поступает на информационный вход регулируемого ограничителя 13, где ограничивается по определенной величине, причем величина ограничения определяется ве9 2
личиной люфта (сигнал с выхода второго сумматора).
Так как сигнал с выхода второго 12 дешифратора имеет большую вели- чину, что может приводить к насьщению второго усилителя, и, как следствие, к увеличению ошибки следующей системы, при уменьшении величины люфта уровень ограничения уменьшается. Та- КИМ образом предотвращается насьш1ение второго усилителя после выбора люфта исполнительным двигателем 5.
Сформированные сигналы поступают на первый 3 сумматор, усиливаются вторым усилителем и подаются на исполнительный двигатель 5, который осуществляет выбор люфта редуктора 6.
20
Формула изобретения
5
0
Комбинированная следящая система с люфтом, содержащая измеритель рассогласования, первый вход которого является входом системы, а выход через первый усилитель соединен с первым входом первого сумматора, выход которого через последовательно соединенные второй усилитель и исполнительный двигатель соединен с входом редуктора, выход которого является выходом системы и через блок обратной связи соединен с вторым входом измерителя рассогласования, вход системы через первый дифферен5 циатор соединен с вторым входом первого сумматора, выход исполнительного двигателя через блок скоростной обратной связи соединен с третьим входом первого сумматора, отличающаяся тем, что, с целью повьш ения точности системы, в нее дополнительно введены интегратор, второй сумматор, второй дифференциатор и регулируемый ограничитель, выход которого соединен с четвертым входом первого сумматора, пятый вход которого объединен с информационным входом регулируемого ограничителя и соединен с выходом второго дифферен-
0 циатора, вход которого объединен с управляющим входом регулируемого ог- раничителя и соединен с выходом второго сумматора, первый вход которого соединен с выходом интегратора, а
5 второй вход второго сумматора соединен с выходом блока обратной связи.
0
5
авх
-
73
Редактор А.Ворович
Составитель Г.Нефедова
Техред М.Ходанйч- Корректор Л.Патай
2509/41
Тираж 863Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Л
| название | год | авторы | номер документа |
|---|---|---|---|
| Комбинированная следящая система с люфтом | 1987 |
|
SU1571546A2 |
| Комбинированная следящая система | 1982 |
|
SU1023276A1 |
| Следящая система | 1975 |
|
SU742871A1 |
| Следящая система для управления гелиостатом | 1981 |
|
SU964575A1 |
| Следящая система | 1980 |
|
SU885970A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2154295C1 |
| Следящая система | 1978 |
|
SU746405A1 |
| Следящая система | 1982 |
|
SU1109711A1 |
| Следящая система | 1989 |
|
SU1732329A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2143719C1 |
Изобретение относится к высокоточным системам автоматического управления и может быть использовано в следящих системах с люфтом в механической передаче. Целью изобретения является повьшение точности следящей системы с люфтом. Система содержит измеритель рассогласования, два делителя, два сумматора, исполнительный двигатель, редуктор, блок обратной связи, блок скоростной обратной связи, два дифференциатора, интеграторы и регулируемый ограничитель. Сущность изобретения заключается в косвенном измерении величины люфта и организации контура положительной обратной связи по сигналу величины люфта, что повьшает быстродействие при обработке люфта редуктора. 1 ил. со 00 CD 00 со
| Зайцев Г.Ф., Стеклов В.К | |||
| Комбинированные следящие системы | |||
| Киев: Техника, 1978, с | |||
| Деревянный коленчатый рычаг | 1919 |
|
SU150A1 |
| Комбинированная следящая система | 1982 |
|
SU1023276A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
