Изобретение относится к машиностроению, а именно к автоматизации сварочных процессов, и может быть использовано при автоматическом направлении сварочной головки по стыку свариваемых изделий.
Цель изобретения - расширение функциональных возможностей устройства за счет формирования траектории перемещения сварочной головки по шести координатам.
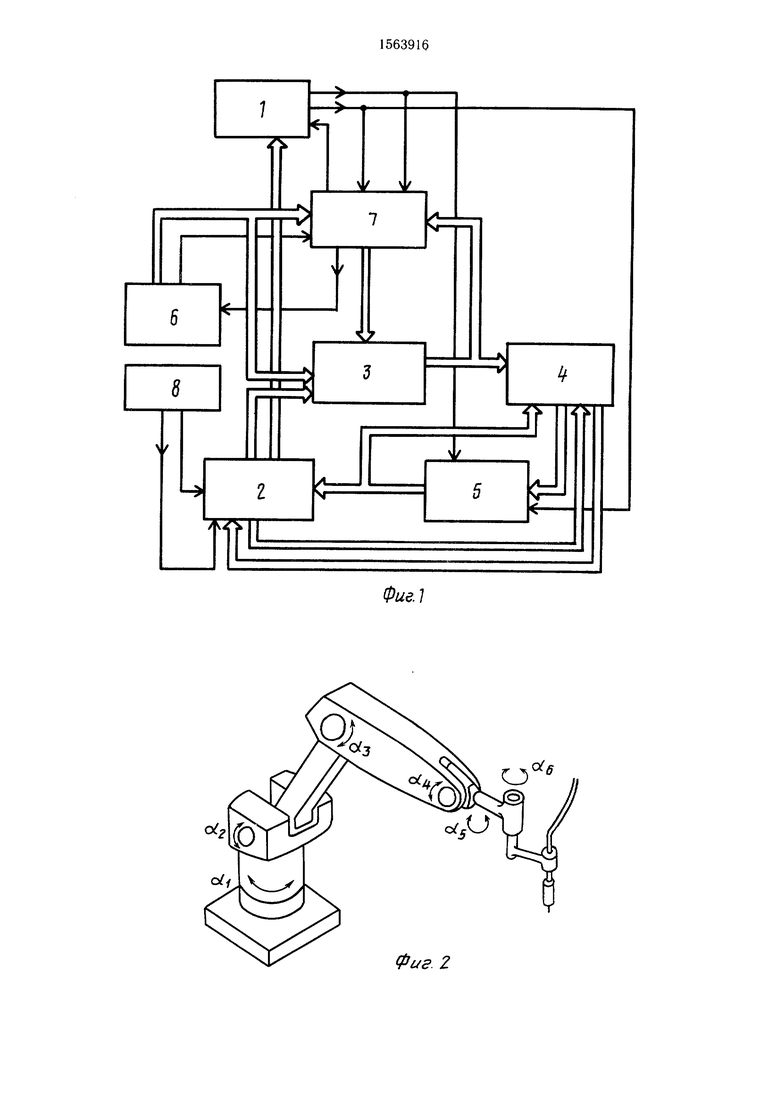
На фиг. 1 дана блок-схема устройства; на фиг. 2 - общий вид робота с ангуляр- ной системой координат (кинематическая схема устройства); на фиг. 3 - вариант кинематической схемы устройства с ортого- нально-ангулярной системой координат; на фиг. 4 - схема определения углового положения головки в ортогональной системе координат; на фиг. 5 - схема определения координат конца электрода по координатам точки D; на фиг. 6 - блок-схема второго интерполятора системы контурного управления; на фиг. 7 - схема расположения головки относительно оси я|э; на фиг. 8 -
блок-схема формирователя сигнала кромок, на фиг. 9 - пример выполнения датчика близости; на фиг. 10 - схема блока управления; на фиг. 11 - схема первого блока памяти; на фиг. 12 - вариант выполнения элемента задержки; на фиг. 13 - схема второго блока памяти; на фиг. 14 - вариант выполнения распределителя импульсов; на фиг. 15 - схема системы контурного управления; на фиг. 16 - схема вычислительного блока; на фиг. 17 - траектория движения электрода по разделке.
Устройство для осуществления способа содержит формирователь 1 сигнала кромок стыка, систему 2 контурного управления, первый -блок 3 памяти, вычислительный блок 4, второй блок 5 памяти, привод 6 вращения, блок 7 управления и связанный с ним датчик 8. Первый выход формирователя 1 сигнала кромок связан с третьим входом блока 5 памяти и с первым входом блока 7 управления, второй выход - со вторыми входами этих блоков, первый выход
сд
ОЭ
со со
о
системы 2 контурного управления связан с первым входом первого блока 3 памяти, второй выход - с третьим входом вычислительного блока 4. Выход первого блока 3 памяти связан с первым входом вычислительного блока 4 и с пятым входом блока 7 управления. Первый выход вычислительного блока 4 связан с первым входом второго блока 5 памяти, второй выход - с третьим входом системы 2 контурного управления, третий выход - со вторым входом формирователя 1 сигнала кромок. Выход второго блока 5 памяти связан с четвертым входом системы 2 контурного управления и со вторым входом вычислительного блока 4. Первый и второй выходы привода вращения 6 связаны соответственно с третьим и с четвертым входами блока 7 управления. Первый выход блока 7 управления связан с первым входом формирователя 1 сигнала кромок, второй вход - со входом привода 6 вращения, третий выход - с третьим входом первого блока 3 памяти. Два выхода датчика 8 расстояния связаны с первыми и вторым входами системы 2 контурного управления. Формирователь 1 сигнала кромок содержит экстрематор 9,задатчик 10, последовательно соединенные элемент задержки 11 и одновиб- ратор 12, последовательно соединенные блок 13 памяти, вычитатель 14 и блок 15 сравнения. Первые входы экстрематора 9 и блока 13 памяти и второй вход вычита- геля 14 связаны с третьим входом системы 2 контурного управления. Выход экстрематора 9 связан со вторым входом блока 13 памяти, а вход - с первым выходом блока 7 управления. Выход блока 15 сравнения связан со вторыми входами блока управления и второго блока 5 памяти и с входом элемента 11 задержки. Выход задат- чика 10 связан со вторым входом блока 15 сравнения, выход одновибратора 12 связан с первым входом блока 7 управления и с третьим входом второго блока 5 памяти. Блок 7 управления содержит блок 16 сравнения, первый и второй элементы ИСКЛЮЧАЮЩЕЕ ИЛИ 17, 18, распределитель 19 импульсов, мультиплексор 20, последовательно соединенные счетчик 21, блок 22 памяти и элемент 23 задержки. Выход блока 16 сравнения связан с первым входом первого элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 17, выход которого связан со вторым входом элемента 23 задержки. Выход второго элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 18 связан с четвертым входом блока 7 управления. Выход элемента 23 задержки связан с первым входом формирователя 1 сигнала кромок и с первым входом второго элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 18. Выход распределителя 19 импульсов связан с третьим входом блока 7 управ20
элементов ИСКЛЮЧАЮЩЕЕ ИЛИ 17 и 18 и первые входы мультиплексора 20 и распределителя 19 импульсов связаны со вторым выходом привода 6 вращения, второй вход распределителя 19 импульсов связан с пер5 вым выходом формирователя 1 сигнала кромок, второй и третий входы мультиплексора 20 связаны с выходом первого блока 3 памяти, второй вход счетчика 21 связан со вторым выходом формирователя 1 сигна10 л а кромок.
Второй блок 5 памяти содержит блоки 24-28 регистров и распределитель 29 импульсов, первый вход распределителя 29 импульсов связан с выходом блока 15 сравне15 ния (со вторым выходом формирователя 1 сигнала кромок), второй вход распределителя 29 импульсов связан с первым выходом формирователя 1 сигнала кромок (с выходом одновибратора 12), выход распределителя 29 импульсов связан со входами управления записью блоков регистров 24-28, входы блоков 24-28 регистров связаны с первым выходом вычислительного блока 4, выходы блоков 24-28 регистров связаны с первым входом системы 2 контурного управления и
25 со вторым входом вычислительного блока 4. Система 2 контурного управления содержит формирователь 30 сигнала скорости, первый линейный интерполятор 31, последовательно соединенные коммутатор 32, второй интерполятор 33, блок 34 суммирования и приводы 35; выход коммутатора 32 подключен ко входу формирователя 30 сигнала скорости, выход которого связан со вторым входом второго линейного интерполятора 33, выход первого линейного интерполятора 31 связан со вторым входом блока 34, суммирования и со вторым входом формирователя 1 сигнала кромок (со входом экстрематора 9), второй выход второго интерполятора 33 связан с адресным входом коммутатора 32 и с третьим входом вычислительного блока 4,
40 выход приводов 35 связан с первым входом первого блока 3 памяти, первый вход первого интерполятора 31 связан со вторым выходом вычислительного блока 4, второй и третий входы первого интерполятора 31 связаны с выходами датчика 8 расстояния.
Вычислительный блок 4 содержит последовательно соединенные коммутатор 36, первый вычислитель 37 тангенциального вектора, второй вычислитель 38 нормального вектора, последовательно соединенные третий вычислитель 39 и четвертый вычислитель 40, вход третьего вычислителя 39 связан с выходом приводов 35 (с первым выходом системы 2 контурного управления), адресный вход коммутатора 36 связан с выходом интерполятора 33 (со вторым выходом системы 2
45
50
ления. Выход мультиплексора 20 связан с пер- 55контурного управления), второй вход коммувым входом блока 16 сравнения. Второйтатора 36 связан с выходами регистров 24- вход блока 16 сравнения связан с первым выходом привода 6 вращения, вторые входы
28, второго блока 5 памяти, выход четвертого вычислителя связан со вторым входом
0
элементов ИСКЛЮЧАЮЩЕЕ ИЛИ 17 и 18 и первые входы мультиплексора 20 и распределителя 19 импульсов связаны со вторым выходом привода 6 вращения, второй вход распределителя 19 импульсов связан с первым выходом формирователя 1 сигнала кромок, второй и третий входы мультиплексора 20 связаны с выходом первого блока 3 памяти, второй вход счетчика 21 связан со вторым выходом формирователя 1 сигна0 л а кромок.
Второй блок 5 памяти содержит блоки 24-28 регистров и распределитель 29 импульсов, первый вход распределителя 29 импульсов связан с выходом блока 15 сравнения (со вторым выходом формирователя 1 сигнала кромок), второй вход распределителя 29 импульсов связан с первым выходом формирователя 1 сигнала кромок (с выходом одновибратора 12), выход распределителя 29 импульсов связан со входами управления записью блоков регистров 24-28, входы блоков 24-28 регистров связаны с первым выходом вычислительного блока 4, выходы блоков 24-28 регистров связаны с первым входом системы 2 контурного управления и
5 со вторым входом вычислительного блока 4. Система 2 контурного управления содержит формирователь 30 сигнала скорости, первый линейный интерполятор 31, последовательно соединенные коммутатор 32, второй интерполятор 33, блок 34 суммирования и приводы 35; выход коммутатора 32 подключен ко входу формирователя 30 сигнала скорости, выход которого связан со вторым входом второго линейного интерполятора 33, выход первого линейного интерполятора 31 связан со вторым входом блока 34, суммирования и со вторым входом формирователя 1 сигнала кромок (со входом экстрематора 9), второй выход второго интерполятора 33 связан с адресным входом коммутатора 32 и с третьим входом вычислительного блока 4,
0 выход приводов 35 связан с первым входом первого блока 3 памяти, первый вход первого интерполятора 31 связан со вторым выходом вычислительного блока 4, второй и третий входы первого интерполятора 31 связаны с выходами датчика 8 расстояния.
Вычислительный блок 4 содержит последовательно соединенные коммутатор 36, первый вычислитель 37 тангенциального вектора, второй вычислитель 38 нормального вектора, последовательно соединенные третий вычислитель 39 и четвертый вычислитель 40, вход третьего вычислителя 39 связан с выходом приводов 35 (с первым выходом системы 2 контурного управления), адресный вход коммутатора 36 связан с выходом интерполятора 33 (со вторым выходом системы 2
5
0
татора 36 связан с выходами регистров 24-
28, второго блока 5 памяти, выход четвертого вычислителя связан со вторым входом
второго вычислителя 38 и с первым входом второго блока 5 памяти (со входами регистров 24-28), выход второго вычислителя 38 связан с первым входом второго блока 5 памяти и с третьим входом системы 2 контурного управления (с первым входом первого интерполятора 31).
Датчик 8 расстояния содержит датчик 41 расстояния и задатчик 42, подключенные ко входам вычислителя 43, выход которого связан с преобразователем 44 код-частота; выход преобразователя 44 код-частота и выход знакового разряда вычислителя 43 связаны соответственно со вторым и с четвертым входами системы 2 контурного управления (со
вторым и третьим входами интерполято- 15 пульс, по которому в блок 13 памяти про- ра 31).изводится запись текущего расстояния S,, с
Элемент задержки 23 содержит последо- выхода интерполятора 31.
вательно соединенные задатчик 45, мульти-Задатчик 10 выполнен в виде регистра.
плексор 46, элемент И 47, счетчик 48, эле-Элемент 11 задержки выполнен аналогичмент ИЛИ 49, элемент НЕ 50; второй вход но элементу 23 задержки. Блок 13 памяти элемента И 47 связан с выходом элемента 20 представляет собой регистр. Вычитатель 14 ИЛИ 49, второй вход расширения предуста- выполнен в виде комбинационной схемы новки счетчика 48 связан с выходом элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 17, третий вход счетчика 48 связан с выходом блока 22 памяти, выход элемента НЕ 50 связан со вхо- 25 дом экстрематора 9 и с первым входом второго элемента ИСКЛЮЧАЮЩЕЕ ИЛИ
18, вход мультиплексора 46 связан с выходом блока синхронизации интерполяторов 31 и 33 (генератора частоты с п-выходами разБлок 15 формирует сигнал «1 при превышении выходного кода вычитателя 14 значения кода задатчика 10.
Блок 16 формирует сигнал «1 при превышении текущего угла т|), граничного значения ij5i или ф2- Распределитель 19 импульсов распределяет импульс с одновиб- ратора 12 по двум каналам - левому или правому в зависимости от направления враличной частоты). Распределитель 29 импуль- 30 щения электрода, в результате чего запись
Привод 6 вращения имеет кодовый датчик положения и схему определения направления вращения.
Блок 7 управления по первому выходу формирует импульс, по фронту которого стробируется выход экстрематора 9, повторному выходу формирует сигнал управления направлением вращения привода 6, по третьему выходу - импульсный сигнал разрешения записи в регистры блока 3 памяти.
Датчик 8 расстояния формирует сигнал ошибки расстояния от кончика электрода до поверхности разделки стыка.
Экстрематор 9 формирует в момент максимального заглубления в разделку им
но элементу 23 задержки. Блок 13 памяти представляет собой регистр. Вычитатель 14 выполнен в виде комбинационной схемы
Блок 15 формирует сигнал «1 при превышении выходного кода вычитателя 14 значения кода задатчика 10.
Блок 16 формирует сигнал «1 при превышении текущего угла т|), граничного значения ij5i или ф2- Распределитель 19 импульсов распределяет импульс с одновиб- ратора 12 по двум каналам - левому или правому в зависимости от направления вращения электрода, в результате чего запись



| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для сварки | 1987 |
|
SU1558598A1 |
| Устройство для сварки | 1987 |
|
SU1555078A1 |
| Устройство для адаптивного управления движением сварочной головки по стыку | 1985 |
|
SU1311885A1 |
| Устройство для адаптивного управления движением сварочной головки по стыку | 1985 |
|
SU1348108A1 |
| Устройство слежения за стыком | 1987 |
|
SU1445880A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НАГРУЖЕНИЕМ ПРИ ПРОГРАММНЫХ ИСПЫТАНИЯХ МЕХАНИЧЕСКИХ КОНСТРУКЦИЙ НА УСТАЛОСТНУЮ ПРОЧНОСТЬ | 2007 |
|
RU2365963C2 |
| Способ сварки и устройство для его осуществления | 1987 |
|
SU1555080A1 |
| Способ сварки и устройство для его осуществления | 1987 |
|
SU1493408A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НАГРУЖЕНИЕМ ПРИ ПРОГРАММНЫХ ИСПЫТАНИЯХ МЕХАНИЧЕСКИХ КОНСТРУКЦИЙ НА УСТАЛОСТНУЮ ПРОЧНОСТЬ | 2007 |
|
RU2365965C2 |
| Программное задающее устройство | 1981 |
|
SU991376A1 |







Изобретение относится к автоматизации сварочных процессов и может быть использовано при автоматическом направлении сварочной головки по стыку свариваемых изделий. Цель изобретения - расширение функциональных возможностей устройства за счет формирования траектории перемещения сварочной головки по шести координатам. Устройство для сварки содержит привод вращения, датчик расстояния, систему контурного управления, блоки памяти, вычислительный блок. В устройство введены блок управления и формирователь сигнала кромки стыка. В устройстве осуществляется сканирование головки по дуге окружности. В моменты пересечения головкой стыка записываются текущие координаты сварочной головки, по которым вычисляют последующую опорную точку, в соответствии с которой производят перемещение сварочной головки вдоль стыка. При неточном исходном расположении оси (т.е. не по нормали, а с некоторым отклонением от нее) через некоторое число она выходит в нормальное положение, что обеспечивается временной задержкой подъема электрода со дна разделки. 2 з.п. ф-лы, 17 ил.
сов содержит последовательно соединенные счетчик 51 и демультиплексор 52.
Формирователь 1 сигнала кромок по первому выходу формирует (с выхода бло ка 15 сравнения) импульсный сигнал в мо
мент поднятия электрода из разделки на за- 35 торому формируется сигнал реверса враще- данную в задатчике 10 высоту, по которой про- ния. Счетчик 21 служит для изменения адизводится установка в нулевое состояние счетчика 21 блока 7 и изменение состояния счетчика 51 распределителя 29 блока 5 памяти, по второму выходу - формирует посредством одновибратора 12 импульс, по фронту которого производится запись во второй блок 5 памяти вычисленных координат точек траектории из координат в первый блок 3 памяти.
Система 2 контурного управления осу-
ществляет управление приводами робота по векторам координат, записанным в блоке 5 памяти, с одновременным следящим управлением положения головки в направлении оси электрода (до нормали к стыку). Блок 3 памяти выполнен в виде 12 регистров координат. Вычислительный блок 4 выполняет функции преобразования координат из ан- гулярной системы координат в ортогональную, вычисления векторов координат опорных точек траектории и вычисления вектора нормального к стыку направления.
Блок 5 памяти служит для записи вектора координат опорных точек траектории, вычисленных в блоке 4.
кодов текущего положения производится либо в левые регистры блока 3 памяти с индексом 2, либо в правые, с индексом .
Мультиплексор 20 выбирает одно из двух граничных значений регистров v|5i, г|ч. по ко5 регистров 24-28.
реса блока 22 памяти, который выполнен в виде ОЗУ. Счетчик 21 изменяет состоянии по фронту сигнала с элемента 23 задержки и устанавливается в нулевое состояние при единичном сигнале с выхода блока 15 сравнения.
Распределитель 29 импульсов ос} ществля- ет последовательное по кольцу распределение импульсов с одновибратора по блокам
Формирователь 30 скорости формирует код скорости контурного перемещения (скорости сварки) по сигналу В ширины разделки и может быть выполнен в виде ПЗУ с преобразователем кода. 0
Линейный интерполятор 31 формирует корректирующий код нормального перемещения относительно сформированной траектории.
Линейный интерполятор 31 выполнен в 5 виде формирователя 53 линейно изменяюще гося кода на реверсивном счетчике, выход которого подключен к первым входам блоков 54-56 умножения, вторые входы которых связаны со вторым выходом вычислительного блока 4.
Коммутатор 32 осуществляет выбор двух векторов координат опорных точек с блока 5 памяти по адресному сигналу со второго выхода интерполятора 33. Интерполятор 33 осуществляет интерполяцию в ортогональной системе координат по опорным точкам блока 5 памяти и формирует адресный код по сигналу окончания интервала интерполяции. Блок 34 суммирования содержит сумматоры по трем ортогональным координатам и вычислитель-преобразователь координат из ортогональной системы в ангулярную.
Приводы 35-следящие с датчиками положения по всем координатам. Коммутатор 36 выполнен аналогично коммутатору 32.
Вычислитель 38 осуществляет вычисление вектора тангенциального направления (вектора, совпадающего по направлению с вектором контурного перемещения).
Вычислитель 38 осуществляет вычисление вектора Л нормального направления. Вычислитель 39 осуществляет преобразование координат из ангулярной системы в ортогональную. Вычислитель 40 осуществляет вычисление опорных точек траектории, ширины разделки стыка и вектора разности векторов левой и правой точек траектории.
Датчик 41 расстояния выполнен в виде датчика напряжения (дугового промежутка), Вычитатель 43 выполнен с аналого цифровым преобразователем. Преобразователь 44 код-частота формирует последовательность импульсов с частотой, линейно зависящей от выходного кода вычитателя 43. Задатчик 45 выполнен в виде регистра.
Мультиплексор 46 выбирает выход с необходимой частотой, определяющей время задержки, с выхода блока синхронизации.
Счетчик 48-вычитающий, с предустановкой. Предустановка производится при нулевом сигнале на входе разрешения предустановки с выхода элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 17. Счетчик 52 изменяет состояние по фронту сигнала с выхода блока 15 сравнения, формирует адресный сигнал де- мультиплексора 52.
Устройство работает следующим образом.
Перед сваркой в блоки 3 и 5 памяти записывают исходные векторы координат, определяющие начальную точку и направление сварки. В формирователе 30 задают закон формирования контурной скорости в зависимости от ширины разделки стыка, программируют блок 22 памяти, формируя закон изменения амплитуды колебаний головки. При включении устройства все счетчики устанавливаются в исходное нулевое состояние. При этом счетчик 21 обеспечивает при нулевом адресном сигнале минимальное время задержки и минимальную амплитуду поиска стыка. Сварочный ток выключен
(возможно горение дежурной дуги или протекание тока от дополнительного источника тока с увеличенной частотой), привод ty включен и головка при движении к исход- ной точке совершает угловые колебания относительно оси ij). При вращении головки против часовой стрелки (если смотреть по направлению к концу электрода), схема определения направления вращения привода 6 формирует нулевой логический сигнал, при
° вращении против часовой стрелки - единичный сигнал, что вызывает подключение ко второму входу блока 16 сравнения посредством мультиплексора 20 выхода соответственно регистра или я|)2- В моменты вы5 хода кода текущего положения ц за установленные границы, на выходе элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 17 формируется единичный сигнал, который через время задержки элемента 23 вызывает посредством второго элемента ИСКЛЮЧАЮЩЕЕ ИЛИ
0 18 изменение кода направления и последующий реверс привода 6. С каждым моментом реверса состояние счетчика 21 увеличивается на единицу, что вызывает изменение адреса блока 22 памяти и соответ5 ствующее увеличение времени задержки. При этом амплитуда колебаний головки растет до максимальной. Если формирователь 1 сигнала кромок не находит стык при максимальной амплитуде, то в единичном состоянии счетчика 21 производится отклю0 чение сварочного тока (например, посредством элемента И и триггера). Если формирователь 1 находит кромку стыка, то по сигналу с выхода блока 15 счетчик сравнения 21 устанавливается в нулевое состояние, при котором амплитуда колебаний
5 минимальна.
Формирование задержки на заданное время обеспечивается счетчиком 48 посредством элементов 47, 49, 50. При нулевом сигнале с выхода элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 17, счетчик 48 находится в предустановленном состоянии, при единичном сигнале с выхода элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 17 счетчик работает в режиме вычитания и после прихода в нулевое состояние формирует сигнал на выходе инвертора 50. При
5 приближении головки к исходной точке и пересечении электродом стыка, формирователь 1 формирует на левой и правой поверхностях от кромок стыка в точках F, Рч импульсные сигналы, по которым в регистры i|3i и |)2 записываются новые значения,
0 определяющие границы колебаний. Кроме того, посредством интерполятора 31 в эти же моменты времени формируется сигнал расстояния Si, S-2- В момент минимального расстояния при заглублении электрода в разделку код расстояния записывается в блок 13
памяти по импульсу с экстрематора 9. При вращении электрода код расстояния увеличивается на кромках и на выходе вычитателя 14 появляется возрастающий код разности. В
момент превышения заданной величины в за-По первому импульсу с одновибратора 12
датчике 10 блок 15 сравнения формирует производится перезапись в регистр 24 первой единичный сигнал, посредством которого вычисленной точки, затем состояние счетчи- сбрасывается счетчик 21. Фронт сигнала с ка 51 изменяется на единицу по фронту выхода блока 15 сравнения задерживается 5 импульса с выхода блока 15 сравнения и с элементом 11 задержки, так как в этом слу-приходом нового импульса с одновибратора 12 , вновь вычисленная точка записывается в столбец регистра 25 и далее запись по импульсам с одновибратора 12 производится по кольцу в столбцы 26, 27, 28, 24,
чае расстояние Si, 82 характеризует угловое положение электрода относительно продольной плоскости стыка.
10
25, ... . Таким образом, приблизительно за время одного полуколебания головки поперек стыка производится вычисление последующего вектора опорной точки.
Сигнал текущего положения |з|, а также текущие координаты точки D а, записываются в регистры с индексом 1 или регистр с индексом 2 в зависимости от направления вращения головки обеспечивается рас10
25, ... . Таким образом, приблизительно за время одного полуколебания головки поперек стыка производится вычисление последующего вектора опорной точки.
Вычисление координат X, Y, Z, в, if, В
пределителем 19 импульсов с одновибра- 15 производится по следующим формулам: тора 12. «г
HD (Х0, Y0, Z0,0D,tpD) Хв (XBi +XeJ Ye (Y81 +Y6l ) Z6 (Z6| +ZBJ2
гдеМ1-матрица преобразования коорди- 0 нат из ангуляторной в ортогональную систему координат;
хв. X0i + дХсс (sinV, cosy, sin©, cos®, , cosv, R) Yoi + uYcf (simp, cosy, sin©, cos®, sine/, cosv, R)
ZBI ZD; + (sin, cosf, sin©, cos®, sinV, cosv, R)
определяются из выражений: R Ra-RD
зл
RB Xri + Y.J + ZBk, RD ХД + Y0 j + Zck, R DB R Rcos4 P + Rsiny-r , r kxin, P rxn, m + где |j - угол, измеряемый против часовой (в системе координат головки фиг. 3, фиг. 4).
35
стрелки от вектора п к вектору г
f
tg ay/ax
- - - (, -X«)i+( -Y«)J + ( -Z)k
U -Ч - ---------.------ -- ------
-XJ2+(Y, -Y,)2 + ()2
.)(Ys,urYa1).(ZBz.IZ,L) V()2 + (Y6z-Ys1)2 + (ZB2-Z61):
где п - вектор нормали, т - вектор касательной к траектории В; D - индексы координат точек E,D,i - индекс текущих координат; t - тангенциальное направление; п - нормальное направление; 1 - координаты правой кромки; 2 - координаты левой кромки.
Таким образом, для вычисления углов 6,Y положения головки требуется две вычисленные опорные точки (два вектора-столбца регистров блока 5 памяти). По мере отработки записанных в блоке 5 вектора опорных точек коммутатором 36 производится послера 12 , вновь вычисленная точка записывается в столбец регистра 25 и далее запись по импульсам с одновибратора 12 производится по кольцу в столбцы 26, 27, 28, 24,
25, ... . Таким образом, приблизительно за время одного полуколебания головки поперек стыка производится вычисление последующего вектора опорной точки.
Вычисление координат X, Y, Z, в, if, В
итс «г
Ds - вектор координат точки D; Но - вектор координат точки D в ортогональной системе координат,
+ xin
35
, cos
а г па i + ayj + azk
довательно по кольцу подключение попарно выходов регистров к вычислительному блоку 4. Аналогично, после каждого изменения адресного сигнала с выхода интерполятора 33 в момент окончания отработки интервала между опорными точками, коммутатор 32 подключает выходы двух последующих регистров блока 5 памяти.
Интерполятор 33 формирует код перемещения точки D узла головки. Одновременно интерполятор 31 формирует линейно изменяющийся код по сигналу датчика 8 расстояния, который определяет перемещение
головки по направлению оси |), параллельной оси электрода и нормальной к стыку.
Блок 34 производит суммирование сигналов по ортогональным координатам и последующее преобразование вектора текущего перемещения головки в ангулярную систему координат робота, который отрабатывается следящими приводами 35 робота. Таким образом, головка, перемещается по программной траектории, которая формируется в процессе движения головки.
Особенностью устройства является непрерывное формирование не только ортогональных, но и угловых координат г|з, причем формирование опорных точек производится без дополнительных датчиков стыка.
Другой особенностью предлагаемого устройства является возможность сварки с прихватками, так как в отличие от известного ввиду наличия границ г|л и головка не теряет стык.
Устройство позволяет осуществлять адаптивное перемещение сварочной головки в пространстве без использования дополнительных датчиков стыка. Устройство может быть также использовано для автоматического формирования и последующей записи в блок памяти робота программы перемещения сварочной головки, что расширяет функциональные возможности существующих сварочных роботов.
Формула изобретения
привода вращения, первый выход которого связан с третьим входом блока управления и вторым входом первого блока памяти, второй выход привода вращения связан с
- четвертым входом блока управления, третий выход которого подключен к третьему входу первого блока памяти, при этом выход первого блока памяти связан с пятым входом блока управления, а выход второго блока памяти связан с третьим входом вычислительного блока.
одновибратор, последовательно соединенные блок памяти, вычитатель и блок сравнения, при этом первые входы экстрема- тора и блока памяти и второй входвычита- теля связаны с третьим выходом системы контурного управления, выход экстрематора
0 связан с вторым входом блока памяти, а вход - с первым выходом блока управления, выход блока сравнения связан с вторыми входами блока управления и второго блока памяти и с входом элемента
g задержки, выход задатчика связан с вторым входом блока сравнения, выход одновибра- тора связан с первым входом блока управления и с третьим входом второго блока памяти.
0 3. Устройство по п. 1, отличающееся тем, что блок управления содержит блок сравнения, первый и второй элементы ИСКЛЮЧАЮЩЕЕ ИЛИ, распределитель импульсов, мультиплексор, последовательно соединенные счетчик, блок памяти и эле5 мент задержки, при этом выход блока сравнения связан с первым входом первого элемента ИСКЛЮЧАЮЩЕЕ ИЛИ, выход которого связан с вторым входом элемента задержки, выход второго элемента ИСКЛЮЧАЮЩЕЕ ИЛИ связан с четвертым входом
0 блока управления, выход элемента задержки связан с первым входом формирователя сигнала кромок и с первым входом второго элемента ИСКЛЮЧАЮЩЕЕ ИЛИ, выход распределителя импульсов связан с третьим
5 входом блока управления, выход мультиплексора связан с первым входом блока сравнения, второй вход блока сравнения связан с первым выходом привода вращения, вторые входы элементов ИСКЛЮЧАЮЩЕЕ ИЛИ и первые входы мультиплек0 сора и распределителя импульсов связаны с вторым выходом привода вращения, второй вход распределителя импульсов связан с первым выходом формирователя сигнала кромок, второй и третий входы мультиплексора связаны с выходом первого блока
5 памяти, второй вход счетчика - с вторым выходом формирователя сигнала кромок.
of
Фие.1
Фиг. 2
О
A()
фие.З
фиг. 5
и
s
to
ет со со ю
Фие.8
Фие-9
Фие.11
фиг. 13
Фиг. 12
в
Ж
30
ЛХ,ЦА2
Si
Зл. 9 Vfl,.7
Фие. Щ
Иг
$л.5
Адр.
Зл.36 бл.Ь
э
||х,//2Д
м
35
-Ч
V.J
Фае. 75
| Устройство для адаптивного управления движением сварочной головки по стыку | 1985 |
|
SU1348108A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
