4
00
О5 О)
Изобретение относится к швейному оборудованию, в частности к устройствам управления закрепочными или пуговичными полуавтоматами.
Цель изобретения - повышение надежности работы.
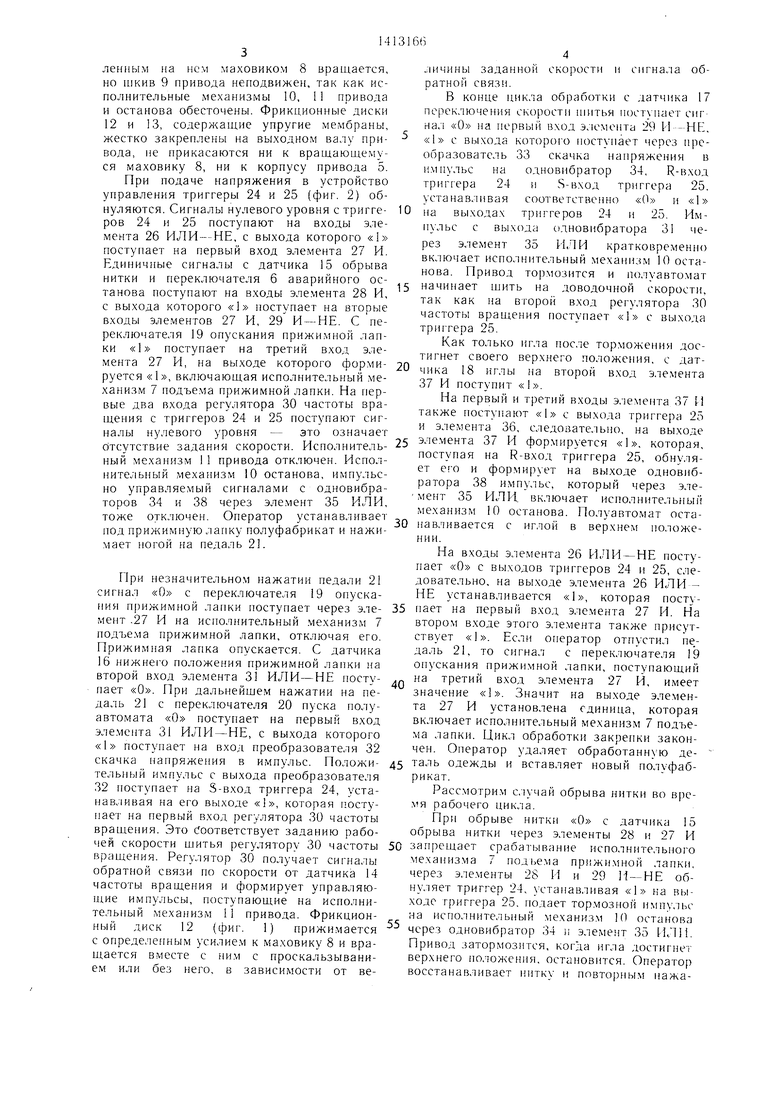
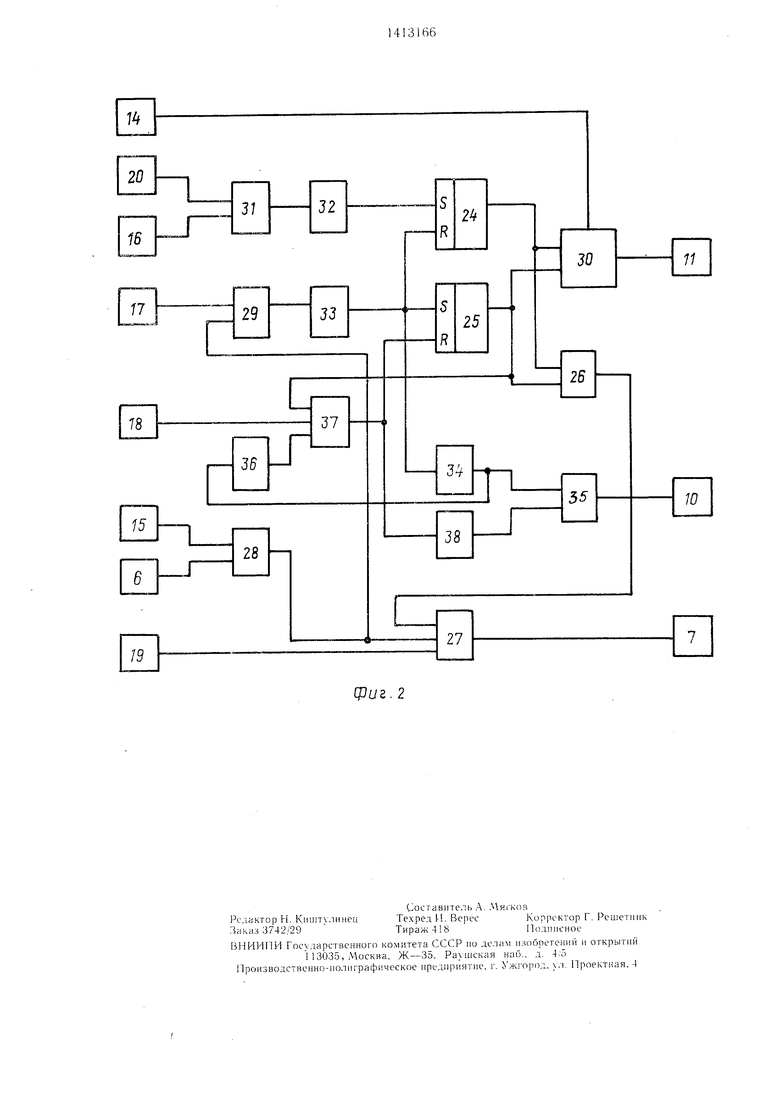
На фиг. 1 представлен полуавто.мат с устройством управления и электроприводом, общий вид; на фиг. 2 - функциональная схема устройства управления швейны.м полуавтоматом.
Закрепочный полуавто.мат, в состав которого входит блок управления, содержит (фиг. 1) блок 1 управления с автоматическим выключателем 2 на передней панели, головку 3 полуавтомата, электродвигатель 4 привода 5, переключатель 6 аварийного останова, э;1ектромаг нит 7 подъе- .ма прижимной лапки, маховик 8, установленный на валу электродвигателя, шкив 9 на выходном валу привода.
В качестве исполнительных .механизмов привода и останова используются электромагнитные муфты, состоящие из тороидальных обмоток 10 и 11, фрикционных дисков 12 и 13. Последние жестко закреплены на выходном валу, на котором установлен датчик 14 частоты вращения.
Маховик 8 предназначен для вращения с постоянной угловой скоростью, так как он установлен на валу асинхронного электродвигателя 4, а выходной шкив 9 - для вращения с угловой скоростью, равной или меньшей, чем маховик 8, в зависимости от величины проскальзывания между маховиком 8 и фрикционным диском 12. Величина проскальзывания определяется величиной тока, п|)отекаю1цего через обмотку 1 электромагнитной муфты вращения. Для торможения с.лужит об.мотка 10 электромагнитной .муфты тор.можения.
На головке 3 гюлуавто.мата смонтирован датчик 5 обрыва нитки, датчик 16 положения прижимной лапки, переключатель 17 скоростей, датчик 18 верхнего положения иглы. Под столешницей с.монтированы переключатель 19 опускания лапки и переключатель 20 пуска полуавто.мата, которые связаны с педалью 21 управления. Переключатели 19 и 20 размещены таким образом, что при нажатии на педаль 21 сначала срабатывает переключатель 19 опуска- НИН лапки, а при дальнейшем нажатии срабатывает переключатель 20 пуска полуавтомата.
Закрепочный полуавтомат содержит механизмы иглы, нитепротягивателя, челнока, перемещения материала вдоль и поперек платформы, привода и автоостанова (не показаны) .
Полуавтомат содержит также копирный диск 22, на котором выполнены пазы, определяющие форму строчки, изготовляемой на полуавтомате. Ня едящиеся в пазах ролики (не показаны) закреплены на
рычагах для передачи при вращении ко- пирного диска 22 движения механизму перемещения материала (не показан). На ко- пирном диске 22 установлен кулачок 23 для воздействия на переключатель 17 скорости в момент, когда нужно перейти с рабочей скорости на доводочную.
Устройство управления содержит (фиг. 2) триггеры 24 и 25, прямые выходы которых соединены с входами эле.мента 26 ИЛИ-НЕ,
Q выход которого соединен с первым входом элемента 27 И. Выход датчика 15 обрыва нитки соединен с первым входом элемента 28 И, второй вход которого подключен к переключателю 6 аварийного останова, а выход - к вторым входам эле5 ментов 29 И-НЕ и 27 И. Переключатель 19 опускания лапки подключен к третьему входу элемента 27 И, вЕ:,гход которого соединен с электромагнитом 7 подъема лапки. Датчик 14 частоты вращения подключен к третьему входу регулятора 30 ско0 рости, выход которого соединен с обмоткой 11 электромагнитной муфты.
Выходы датчика 16 положения лапки и переключателя 20 пуска полуавтомата соединены с соответствующими входами эле5 мента 31 ИЛИ - НЕ, выход которого подключен к входу формирователя 32 импульсов по фронту, выход которого соединен с S-входом триггера 24.
Переключатель 17 скорости соединен с Q первым входом элемента 29 И - НЕ, выход которого соединен с входом формирователя 33 импульсов по фронту, выход которого подключен к R-входу триггера 24, S-BXO- ду триггера 25 и входу одновибратора 34. Выход одновибратора 34 соединен с первым 5 входом э.лемента 35 ИЛИ и инвертором 36, выход которого подключен к третьему входу элемента 37 И, первый вход которого соединен с выходом триггера 25, вторым входом регулятора 30 скорости шитья и вторым входом элемента 26 ИЛИ. Датчик 18
0
верхнего положения и.глы подключен к второму входу элемента 37 И, выход которого соединен с R-входо.м трип ера 25 i-i входо.м одновибратора 38. Выход одновибратора 38 подключен к второму входу элемента 35 ИЛИ, 5 выход которого соединен с обмоткой 10 электромагнитной муфты тормоза.
Устройство работает следующим образом. После включения автоматического выключателя 2 (фиг. 1) подается напряже0 ние питания в блок 1 управления швейным полуавтоматом и на электродвигатель 4 привода 5. Переключатель 6 аварийного останова переводят из положения «Стоп в положение «Пуск. Если игла полуавтомата находится в верхнем положении (в ко5 тором она остановилась в конце предыдущего цикла), срабатывает исполнительный механизм 7 подъема лапки. Лапка поднимается. Ротор электродвигателя 4 с закрепленным на нем маховиком 8 вращается, но uiKHB 9 привода неподвижен, так как исполнительные механизмы 10, 1 привода и останова обесточены. Фрикционные диски 12 и 13, содержащие упругие мембраны, жестко закреплены на выходном валу привода, не прикасаются ни к вращающемуся маховику 8, ни к корпусу привода 5. При подаче напряжения в устройство управления триггеры 24 и 25 (фиг. 2) обнуляются. Сигналы нулевого уровня с триггеров 24 и 25 поступают на входы элемента 26 ИЛИ--НЕ, с выхода которого «1 поступает на первый вход элемента 27 И. Единичные сигналы с датчика 15 обрыва нитки и переключателя 6 аварийного останова поступают на входы элемента 28 И, с выхода которого «1 поступает на вторые входы элементов 27 И, 29 И - НЕ. С переключателя 19 опускания прижимной лапки «1 поступает на третий вход элемента 27 И, на выходе которого формируется «1, включающая исполнительный механизм 7 подъе.ма прижимной лапки. На первые два входа регулятора 30 частоты вращения с триггеров 24 и 25 поступают сигналы нулевого уровня - это означает отсутствие задания скорости. Исполнительный механизм I1 привода отключен. Исполнительный механизм 10 останова, импульс- но управляемый сигналами с одновибра- торов 34 и 38 через элемент 35 ИЛИ, тоже отключен. Оператор устанавливает под прижимную лапку полуфабрикат и нажимает ногой на педаль 21.
При незначительном нажатии педали 21 сигнал «О с переключателя 19 опускания прижимной лапки поступает через элемент .27 И на исполнительный .механизм 7 подъе.ма прижимной лапки, отключая его. Прижимная лапка опускается. С датчика 16 нижнего положения прижимной лапки на второй вход элемента 31 ИЛИ-НЕ поступает «О. При дальнейщем нажатии на педаль 21 с переключателя 20 пуска полуавтомата «О поступает на первый вход элемента 31 ИЛИ-НЕ, с выхода которого «1 поступает на вход преобразователя 32 скачка напряжения в импульс. Положительный импульс с выхода преобразователя 32 поступает на S-вход триггера 24, устанавливая на его выходе «1, которая посту- нает на нервый вход регулятора 30 частоты вращения. Это Соответствует заданию рабочей скорости щитья регулятору 30 частоты вращения. Регулятор 30 получает сигналы обратной связи по скорости от датчика 14 частоты вращения и фор.мирует управляющие импульсы, поступающие на исполнительный механизм 11 привода. Фрикционный диск 12 (фиг. 1) прижимается с определенным усилием к маховику 8 и вра- пхается вместе с ни.м с проскальзыванием или без него, в зависимости от величины заданной скорости н сигнала обратной связи.
В конце цикла обработки с датчика 17 переключении скорости Н1итья ноступает сиг нал «О на нервый вход элемента 29 И -НЕ, 5 «1 с Б1,1хода KOTopoi o ноступает через преобразователь 33 скачка напряжения в импульс на одновибратор 34, R-в.ход триггера 24 н S-вход триггера 25, устанавливая соответственно «( и «1 0 на вьгхода.х триггеров 24 н 25. Им- нульс с выхода с)л.новнбратора 31 через элемент 35 ИЛИ кратковременно включает исполннте,1ьный механизм 10 останова. Привод тормозится и полуавтомат 5 начинает щить на доводочной скорости, так как на вгорой вход регулятора 30 частоты вращения поступает «1 с выхода триггера 25.
Как только игла после торможения достигнет своего верхнего положения, с дат- 0 чнка 18 иглы на второй вход элемента 37 И поступит «1.
На первый и третий входы элемента 37 И также поступают «I с выхода триггера 25 и элемента 36, следовательно, на выходе 5 элемента 37 И формируется «1, которая, поступая на R-вход триггера 25, обну,пя- ет его и формирует на выходе одновнб- ратора 38 импульс, который через эле- мент 35 ИЛИ. включает исполнитель(1ый .механизм 10 останова. Полуавтомат оста- 0 нав,чивается с иг,пой в верхнем положении.
На входы элемента 26 ИЛИ - НЕ ноступает «О с выходов триггеров 24 и 25, следовательно, на выходе элемента 26 ИЛИ - НЕ устанавливается «1, которая посту- 5 пает на первый вход элемента 27 И. На втором входе этого элемента также присутствует «1. Если оператор отпустил пе.- даль 21, то сигна, с переключателя 19 опускания прижимной лапки, поступающий Q на третий вход элемента 27 И, имеет значение «1. Значит на выходе элемента 27 И установлена единица, которая включает исполнительный механизм 7 подъема лапки. Цикл обработки закрепки закончен. Оператор удаляет обработанную де- 5 таль одежды и вставляет новый полуфабрикат.
Рассмотрим случай обрыва нитки во время рабочего цикла.
При обрыве нитки «О с датчика 15 обрыва нитки через элементы 28 н 27 И 0 запрещает срабатывание исполнительного механизма 7 подьема прижимной лапки, через элементы 28 И и 29 И- НЕ обнуляет триггер 24, устанавливая «1 на выходе триггера 25, подает тор.мозной нмпу,ьс на исполнительный механизм 10 останова через одновибратор 34 и элемент 35 ИЛИ. Привод затормозится, когда игла достигнет верхнего ноложення, остановнтся. Оператор восстанавливает })итку и повторным нажатием на педаль 21 запускает полуавтомат на доработку цикла. Действие переклю- ;чателя 6 аварийного останова на полуавтомат такое же, как датчика 15 обрыва нитки.
вала, а блок управления содержит триггеры, элементы , ИЛИ, И -НЕ, И, инвертор, одновибраторы и формирователи, причем переключатель пуска и датчик нижнего положения лапки подключены к соответствующим входам первого элемента ИЛИ-НЕ, соединенного выходами через первый формирователь к S-входу первого триггера, переключатель скорости шитья связан с первым входом эле.мепта И-НЕ, подПредлагаемое устройство управления позволяет значительно упростить конструкцию полуавтомата благодаря устранению механического автоостанова и механического
редуцирования частоты вращения электро- Q ключенного выходом через второй формиро- двигателя; повысить надежность работы по-ватель к R-входу первого триггера, S-входу
луавтомата и увеличить срок его службывторого триггера и входу первого одновибраза счет устранения ударных динамических тора, датчик верхнего положения иглы соеди- нагрузок при механическом останове и при-нен с первым входом первого элемента И,
менения бесконтактных датчиков, переклю-выход которого связан с R-входом второго
чателей и высокопомехоустойчивой серии ми- 15 триггера и через второй одновибратор - с кросхем; расширить область применения по-первым входом элемента ИЛИ, датчик обрыва нити и переключатель останова подключены к соответствующим входам второго элемента И, соединенного выходом с втоти шитья; облегчить наладку и ремонт Q рым входом элемента И-НЕ и первым полуавтомата за счет упрощения конструк-входом третьего элемента И, связанного
вторым входом с переключателем опускания лапки, выходом - с исполнительным механизмом подъема прижимной лапки, а третьим входом с выходом второго 25 элемента ИЛИ - НЕ, первый вход которого подключен к выходу первого триггера и перлуавтомата за счет увеличения ассортимента применяемых ниток и материалов благодаря электронному регулированию скоросции и возможности регулировать скорость пJИTья в широких пределах.
Формула изобретения
Устройство для управления закрепочным полуавтоматом, содержащее переключатели пуска и останова полуавтомата, опускания лапки, скорости шитья, датчики положения лапки, обрыва нити и верхнего положения иглы, блок управления, регулятор частоты вращения, подключенный выходом к исполнительному механизму привода главного вала, и исполнительные механизмы останова главного вала и подъема прижим30
вому входу регулятора частоты вращения, а второй вход - к выходу второго триггера, второму входу регулятора частоты вращения и второму входу первого элемента И, при этом третий вход первого элемента И соединен через инвертор с выходом первого одновибратора и вторым входом элемента ИЛИ, связанного выходом с исполнительным механизмом останова
вала, а блок управления содержит триггеры, элементы , ИЛИ, И -НЕ, И, инвертор, одновибраторы и формирователи, причем переключатель пуска и датчик нижнего положения лапки подключены к соответствующим входам первого элемента ИЛИ-НЕ, соединенного выходами через первый формирователь к S-входу первого триггера, переключатель скорости шитья связан с первым входом эле.мепта И-НЕ, подключенного выходом через второй формиро- ватель к R-входу первого триггера, S-входу
0
вому входу регулятора частоты вращения, а второй вход - к выходу второго триггера, второму входу регулятора частоты вращения и второму входу первого элемента И, при этом третий вход первого элемента И соединен через инвертор с выходом первого одновибратора и вторым входом элемента ИЛИ, связанного выходом с исполнительным механизмом останова

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления петельным полуавтоматом | 1987 |
|
SU1420088A1 |
| Устройство управления автоматической закрепкой строчки | 1985 |
|
SU1306996A1 |
| Швейная машина с программным управлением | 1986 |
|
SU1641913A1 |
| Автоматизированный прядильный модуль | 1988 |
|
SU1684360A1 |
| КРАЕОБМЕТОЧНАЯ ШВЕЙНАЯ МАШИНА | 2011 |
|
RU2493302C2 |
| Швейный полуавтомат для выполнения коротких строчек | 1976 |
|
SU616351A1 |
| Устройство для стабилизации скорости подачи проволоки в механизме подачи проволоки электродуговой установки | 2023 |
|
RU2832031C1 |
| Устройство управления сматыванием нитей основы со шпулярника на шлихтовальной машине | 1988 |
|
SU1666591A1 |
| РЕГУЛЯТОР ПРЯДЕНИЯ | 1973 |
|
SU370290A1 |
| Устройство для защиты электропривода | 1981 |
|
SU991569A1 |
Изобретение относится к швейному оборудованию, конкретнее к устройствам управления для закрепочных, пуговичных и петельных полуавтоматов. Цель изобретения - повышение надежности работы. Устройство содержит датчики и переключатели, исполнительные механизмы привода и останова, подъема прижимной лапки, регулятор частоты вращения, логические элементы, преобразователи скачка напряжения в импульс, триггеры, одновибраторы. Элементы устройства управления соединены таким образом, что выполняются циклограммы работы швейных полуавтоматов классов 820. 2 ил. (Q
ной лапки, огугычаюи ееся тем, что, с цельюглавного вала, а датчик частоты вращеповышения надежности работы, оно снаб-пия главного вала подключен к третьему
жено датчиком-частоты вращения главно1-о
15;с :
I
-
входу регулятора частоты вращения.
фиг.2
| Ручной насос для двух жидкостей | 1923 |
|
SU820A1 |
| Листок-каталог, М.: ЦНИИТЭИлегпище- маш, 1983. | |||
