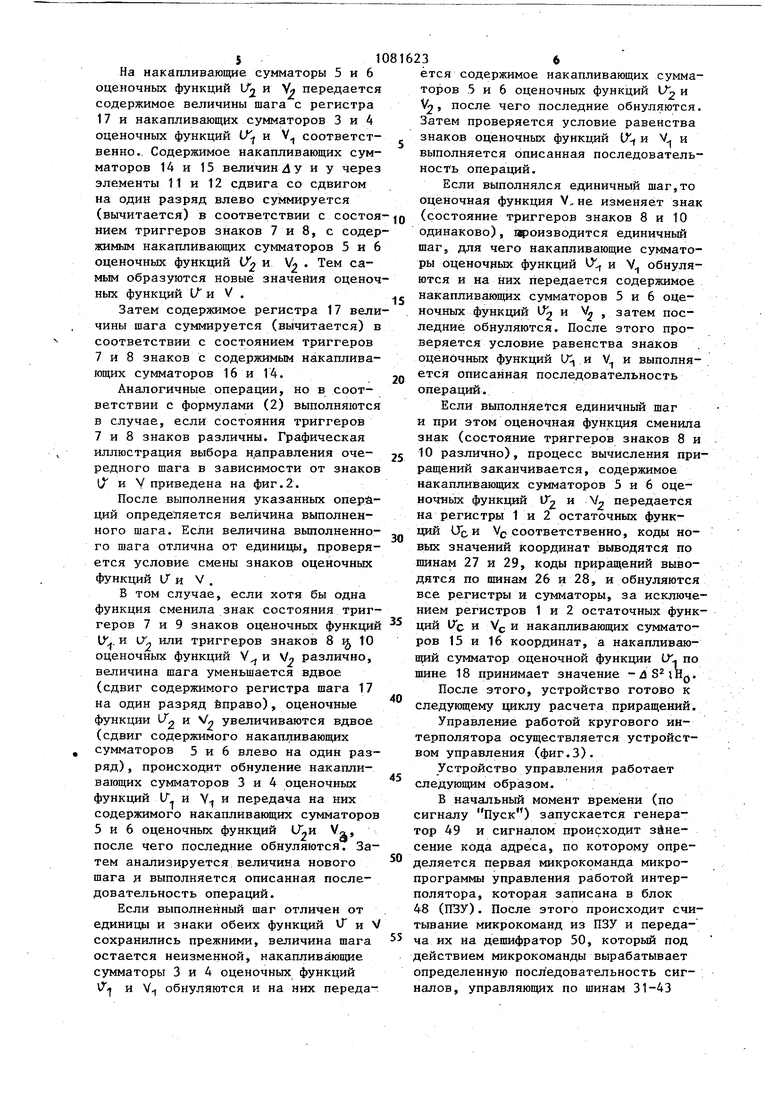
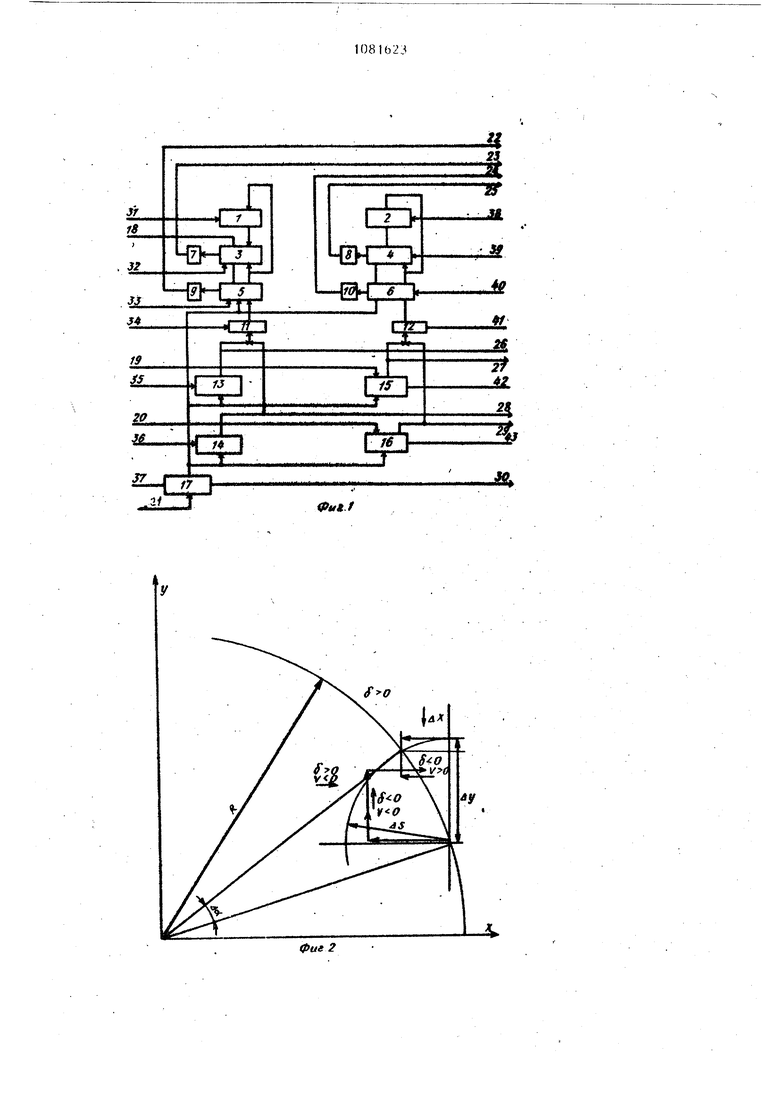
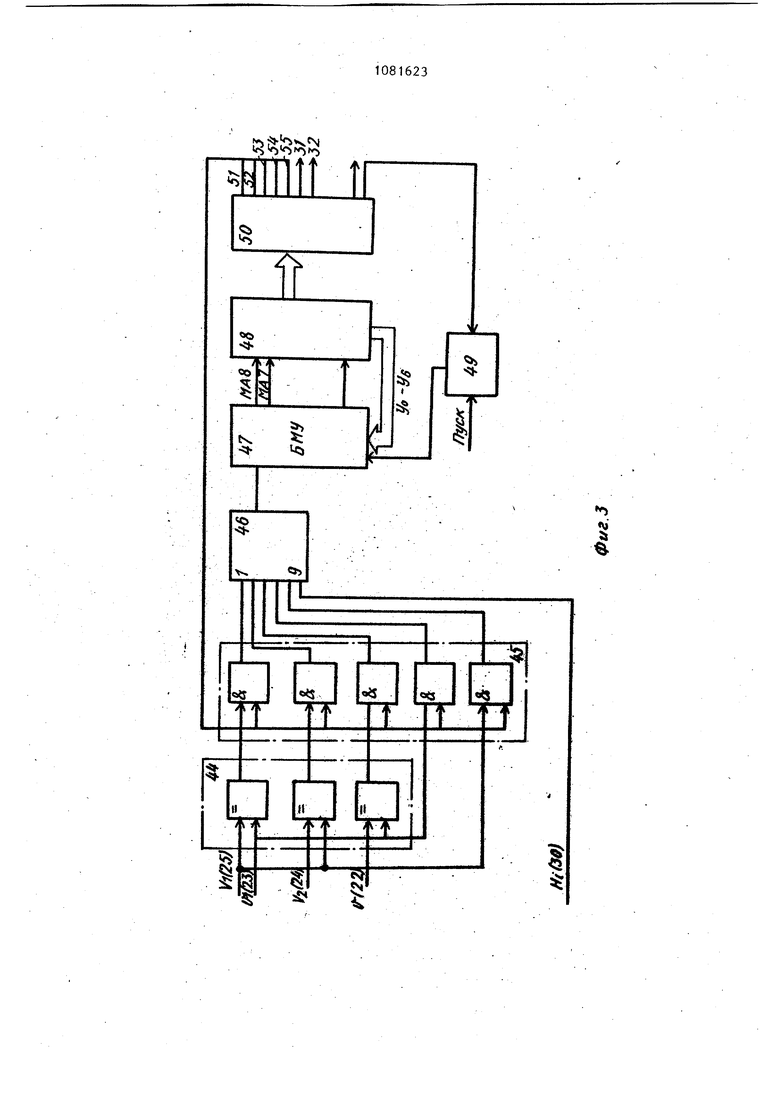
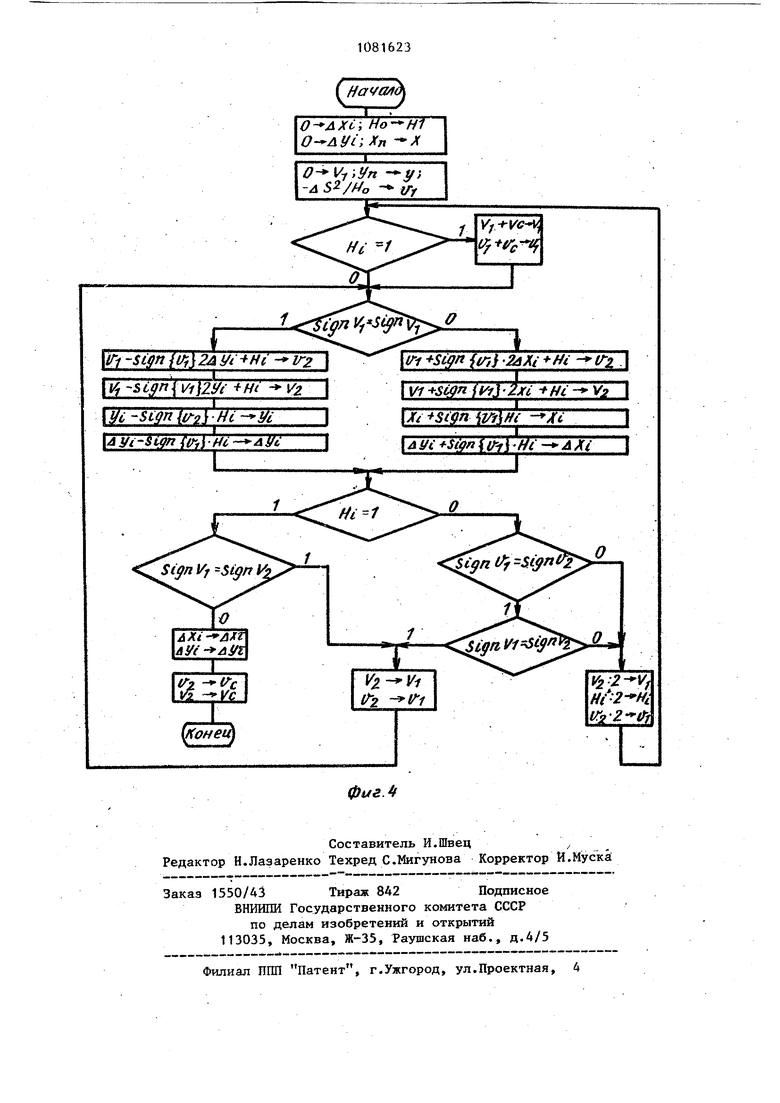
Изобретение относится к автоматике и вычислительной технике и предназначено для использования, например, в системах числового программно го управления станками и другим технологическим оборудованием. Известно устройство для круговой интерполяции, содержащее устройство для деления координат на коэффициент .К и устройство для суммирования результата деления и образования сумм (2(х-)к, 1(у./k) СП. Недостатками этого устройства являются необходимость выполнения двух операций давления и наличие накапливающейся погрешности. Наиболее близким по технической сущности к изобретению является круговой интерполятор, содержащий сумма торы оценочной функции и приращений, блок управления, регистры, установоч ные и управляющие триггеры 2. Однако известное устройство имеет недостаточную точность за счет накоп ления погрешностей, возрастающих с увеличением радиуса обрабатываемой окружности и скорости подачи. Цель изобретения - повышение точности обработки окружности. Поставленная цель достигается тем, что круговой интерполятор, содержащий накапливающие сумматоры оце ночной функции и два накапливающих сумматора приращений, первыми входами соединенные с выходами блока управ-i ления, вторыми входами - с первыми входами накапливающих сумматоров оце ночных функций, а выходами - через элемент сдвига с вторыми входами накапливающих сумматоров оценочных функций, первый выход которых через первый триггер знака подключен к соответствующему входу блока управлени содержит регистр .шага, регистр оста-. точной функции и второй триггер знака I сумматора, вход которого подключен : знаковому выходу накапливаницего сумматора оценочной функций, а выход - к соответствующему входу 6StoKa управления, выход регистра шага сое- 50 динен с.вторыми входами накапливающи сумматоров прира щений, третьи входы накапливающих сумматоров оценочных функций подключены к соответствующим выходам блока управления, а вьпсод через регистр остаточной функции с четвертым входом соответственно, выход младшего разряда регистра шага соединен с соответствующим входом блока управления. На фиг.1 схематически показано предлагаемое устройство; на фиг.2 график выбора направления очередного шага; на фиг.З - блок-схема блока управления; на фиг.4 - алгоритм работы блока управления. Устройство включает регистры 1 и .2 остаточных функций V-.V, накапливающие сумматоры 3 и 4 оценочных функций Т и V, накапливающие сумматоры 5 и 6 оценочных функций и V, триггеры 7-10 знаков сумматоров оценочньк функций V,U,U2, V,, элементы 11 и 12сдвига, накапливающие сумматоры 13и 14 величинах, Л У, накапливающие сумматоры 15 и 16 величин х и у, регистр 17 величины шана Н, шину 18 ввода величины , шину 19 и 20 ввода величин х и у шину 21 ввода величины начального шага Н, выходные шины 22-25 триггеров знаков оценочных функций, выходные шины 26, 27 и 28,29 величины лх,4у их; у соответственно, выходную шину 30 младшего разряда регистра шага Н, шины 31-43 управления. .. Блок управления (фИ1.3) блок 44 элементов совпадения, блок 45 элементов И, элемент ЙЖ 46, блок 47 микропрограммного управления (например, БМУ БИСК 589 ИК01), постоянный запоминаю1дай блок 48, генератор 49 тактовых импульсов, дешифратор 50, имеющий выходные шины 51-55. Синхронизация работы блока управления осуществляется генератором тактовых импульсов. Устройство кругового интерполятора содержит сдвигающий регистр 17 величины Н, вход которого соединен с шиной ввода величины начального шага Н, а его младший разряд по шине 30 соединяется с соответствующим входом устройства управления, соответствующие входы которого соединены с выходами 22-25 триггеров знаков накапливающих сумматоров 7-10 оценочных функций V и V, а соответствующие выходы устройства управления по шинам 31-43 управляют работой устройства, выход регистра величины шага 17 подключен к входам накапливающих сумматоров 5 и 6 Ьценочных функций V и Vj , не2 9 13 и 14 капливающих сумматоров величин приращений /ах и ду, накапливающих сумматоров 15 и 16 координат х и у, к соответствующим входам двух последних сумматоров подключены шины ввода 19 и 20 величин X и у соответствен-но, а вьпсоды - к выходным шинам 27 и 29 величин х и у и входам второго элемента 12 сдвига,выходы накапливаюпщх сумматоров 13 и .14 величин дх и ду подключены к выходным шинам 26 и 28 величин Дх и /jy и входам первого элемента 11 сдвига, выходы которого и выходы второго элемента 12 сдвига соединены с входами накапливающих сумматоров 5 и 6 оценочной функции l2 и у соответственно, причем знаковые разряды последних соединены с входами накапливающего сумматора 3 оценочной функции ,регистра 1 остаточной функции VQ , и накапливающего сумматора 4 оценочной функции V, и регистра 2 остаточной функции VQ соответственно, выходы регистров 1 и 2 остаточных функций V и V подключены к соответствующим входам сумматоров 3 и 4 оценочных функций и Ул знаковые разряды последних соединены с входами триггеров 7 и 8 знаков соответственно, а выходы этих сумматоров - с входами накапливающих сумматоров 5 и 6 оценочных функций V2 и v причем к входу накапливающего сумматора 3 подключена шина 18 ввода величины - дЗ -H(j.
Величина д5 является длиной хорды, соединяющей в обрабатываемом контуре две соседние точки, Н - начальная величина шага интерполяции.Значе- кия лЗ, HQ определяются требуемой точностью обработки, рассчитываются на этапе технологической подготовки всего один раз, так как являются постоянной величиной для обрабатываемой детали.
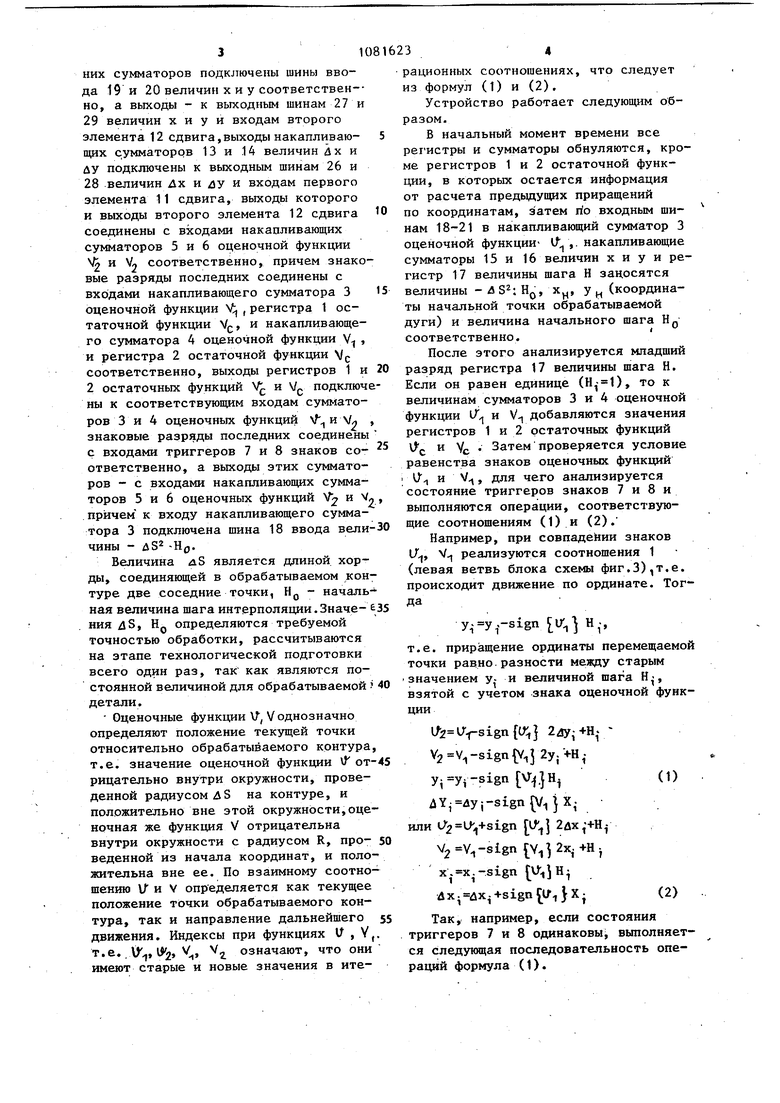
Оценочные функции Xf, V однозначно определяют положение текущей точки относительно обрабатываемого контура, т.е. значение оценочной функции V отрицательно внутри окружности, проведенной радиусом Д8 на контуре, и положительно вне этой окружности,оценочная же функция V отрицательна внутри окружности с радиусом R, проведенной из начала координат, и положительна вне ее. По взаимному соотношению IT и V определяется как текущее положение точки обрабатываемого контура, так и направление дальнейшего движения. Индексы при функциях U , Y, т.е. .ЛУ, Ч,, г означают, что они имеют старые и новые значения в итерационных соотношениях, что следует из формул (1) и (2).
Устройство работает следующим образом.
В начальный момент времени все регистры и сумматоры обнуляются, кроме регистров 1 и 2 остаточной функции, в которых остается информация от расчета предьщущих приращений по координатам, затем по входным шинам 18-21 в накапливающий сумматор 3 оценочной функции- If ,. накапливающие сумматоры 15 и 16 величин х и у и регистр 17 величины шага Н заносятся величины - Л HQ, х, у (координаты начальной точки обрабатываемой дуги) и величина начального шага HQ Соответственно.
После этого анализируется младший разряд регистра 17 величины шага Н. Если он равен единице (Н,- 1), то к величинам сумматоров 3 и 4 оценочной функции 1/ и V добавляются значения регистров 1 и 2 остаточных функций и Vj, . Затем проверяется условие равенства знаков оценочных функций
Ц и V, для чего анализируется состояние триггеров знаков 7 и 8 и выполняются операции, соответствующие соотношениям (1) и (2).
Например, при совпадении знаков 1Л,, V реализуются соотношения 1 (левая ветвь блока схемы фиг.3),т.е. происходит движение по ординате. Тогда
y.y,-sign 1/ Н-,
т.е. приращение ординаты перемещаемой точки равно.разности между старым значением у- и величиной шага Н, взятой с учетом знака оценочной функции
l z krt-sign{U:i 2ЛУ-+Н./ V2 V -sign{V,j2yjVH. y.yV-sign r.(1)
4Y.uyi-sign{V jX или U2 U +sign 1Л, 2дх,-+Н,,-sign Yi 2x.-bHj
x.x.-sign
4x.ux +sign Ui}X- (2)
Так, например, если состояния триггеров 7 и В одинаковы выполняется следующая последовательность операций формула (1). 51 На накапливающие сумматоры 5 и 6 оценочных функций L и передается содержимое величины шага с регистра 17 и накапливающих сумматоров 3 и 4 оценочных функций 1/ и V соответственно.. Содержимое накапливающих сумматоров 14 и 15 величин 4 У и у через элементы 11 и 12 сдвига со сдвигом на один разряд влево суммируется (вычитается) в соответствии с состоя нием триггеров знаков 7 и 8, с содер жимым накапливающих сумматоров 5 и 6 оценочных функций U и /2 . Тем самым образуются новые значейия оценоч ных функций (/ и V . Затем содержимое регистра 17 вели чины шага суммируется (вычитается) в соответствии с состоянием триггеров 7 и 8 знаков с содержимым накапливающих сумматоров 16 и 14. Аналогичные операции, но в соответствии с формулами (2) выполняются в случае, если состояния триггеров 7 и 8 знаков различны. Графическая иллюстрация выбора направления очередного шага в зависимости от знаков U и V приведена на фиг.2. После выполнения указанных операций определяется величина выполненного шага. Если величина вьщолнеяного шага отлична от единицы, проверяется условие смены знаков оценочных функций и и V. В том случае, если хотя бы одна функция сменила знак состояния триггеров 7 и 9 знаков оценочных функций LX,. и Uj или триггеров знаков В ТО оценочных функций V и Vo различно, величина шага уменьшается вдво.е (сдвиг содержимого регистра шага 17 на один разряд бправо), оценочные функции 1/2 и V увеличиваются вдвое (сдвиг содержимого накапливающих сумматоров 5 и 6 влево на один разряд) , происходит обнуление накапливающих сум1 1аторов 3 и 4 оценочных функций LT и Y и передача на них содержимого накапливающих сумматоров 5 и 6 оценочных функций V,,, после чего последние обнуляются. Затем анализируется величина нового шага и выполняется описанная последовательность операций. Если выполненный шаг отличен от единищ) и знаки обеих функций iT и V сохранились прежними, величина шага остается неизменной, накапливающие сумматоры 3 и 4 оценочных функций - и V обнуляются и на них переда36ется содержимое накапливающих сумматоров 5 и 6 оценочных функций 1/ и V, после чего последние обнуляются. Затем проверяется условие равенства знаков оценочных функций IX, и -i и выполняется описанная последовательность операций. Если выполнялся единичный шаг,то оценочная функция V,. не изменяет знак (состояние триггеров знаков 8 и 10 одинаково), Производится единичный шаг, для чего накапливающие сумматоры оценочных функций и V обнуля ются и на них передается содержимое накапливаницих сумматоров 5 и 6 оценочных функций и V , затем последние обнуляются. После этого проверяется условие равенства знаков оценочных функций 1 и V и выполняется описанная последовательность операций. Если выполняется единичный шаг и при этом оценочная функция сменила знак (состояние триггеров знаков 8 и различно), процесс вычисления приращений заканчивается, содержимое накапливающих сумматоров 5 и 6 оценочных функций 1/2 и VT передается на регистры 1 и 2 остаточных функций tJc, и V(j соответственно, коды новых значений координат вьшодятся по шинам 27 и 29, коды приращений выводятся по шинам 26 и 28, и обнуляются все регистры и сумматоры, за исключением регистров 1 и 2 остаточных функций УС и V и накапливающих сумматоров 15 и 16 координат, а накапливающий сзтматор оценочной функции tX. по шине 18 принимает значение . После этого, устройство готово к следующему циклу расчета приращений. Управление работой кругового интерполятора осуществляется устройством управления (фиг.З). Устройство управления работает следующим образом. В начальный момент времени (по сигналу Пуск) запускается генератор 49 и сигналом происходит зАнесение кода адреса, по которому определяется первая микрокоманда микропрограммы управления работой интерполятора, которая записана в блок 48 (ПЗУ). После этого происходит считывание микрокоманд из ПЗУ и передача их на дешифратор 50, который под действием микрокоманды вырабатывает определенную последовательность сигналов, управляюш их по шинам 31-43
работой предлагаемого интерполятора, причем для формирования следующего адреса микрокоманды используются семиразрядная шина, соединяющая выходы блока 48 (ПЗУ) с соответствующими входами управления регистром адреса микрокоманд.
Работа предлагаемого интерполятора и устройства управления тесно взаимосвязана, что отражено в описании и в иллюстрациях структуры интерполя тора, устройства управления и микропрограммы работы предлагаемого устройства. В качестве примера рассмотрим работу блоков 11 и 12, управляемых по шинам 34 и 41, и работу осведомительной шины 30 блока 17 (регист величины шага Н). В соответствии с выражениями 1 и 2 необходимо выполнять умножение на 2, которое заменяется сдвигом на один разряд влево, вьшолняемым блоках 11 и 12. Инструкция о необходимости выполнения сдвига поступает от дешифратора 50 (блок 3 устройства управления) по шинам 34 и 41 в момент времени, который соответствует микроопераций сдвига, микропрограммы работы устройства,записанной в блоке 48 (фиг.З). Переход от одной микрооперации к другой в микропрограмме осуществляется через равные промежутки времени, определяемые периодом следования тактовых импульсов от генератора 49 тактовых импульсов.Для выработки сигналов условных переходов используются дополнительные микросхемы, которые работают следующим образом. Для анализа на равенство знаков (У- и V , 72И V,
(/2 и O-j триггеров используется блок 44 элементов совпадения, для а1нализа состояния триггеров знаков
itj и V применяется блок 5 элементов И. Эти элементы являются клапанами и срабатывают под действием управляющих сигналов 44-48, которые разрешают прохождение того или иного сигнала через элемент ИЛИ к входу признаков блока 47. В зависимости от полученного сигнала происходит условный переход в микропрограмме. Сигнал с выхода младшего разряда регистра шага Hj по ходу выполнения микропрограммы по шине 30 через элемент ШШ 46 попадает на вход признаков блока 47.
Реализацию разветвления в микропрограмме рассмотрим на примере анализа младшего разряда регистра шага Н (равенство единице). Необходимая информа1 ия по шине 30 снимается с регистра шага Н (17) и передается в элемент ИЛИ 46 блока управления (фиг.З), из которого она поступает н вход признаков.блока 47, полученнаЙ информация определяет код адреса либо следующей по порядку микрооперации, либо осуществляется скачок на несколько микроопераций.
Сигналом окончания работы является сигнал, поступающий из дешифратора и отключающий генератор 49 тактовых импульсов.
Таким образом, повьш1енная точность обработки окружности достигается за счет того, что точность обработки окружности не превышает величины единичного шага (дискретности).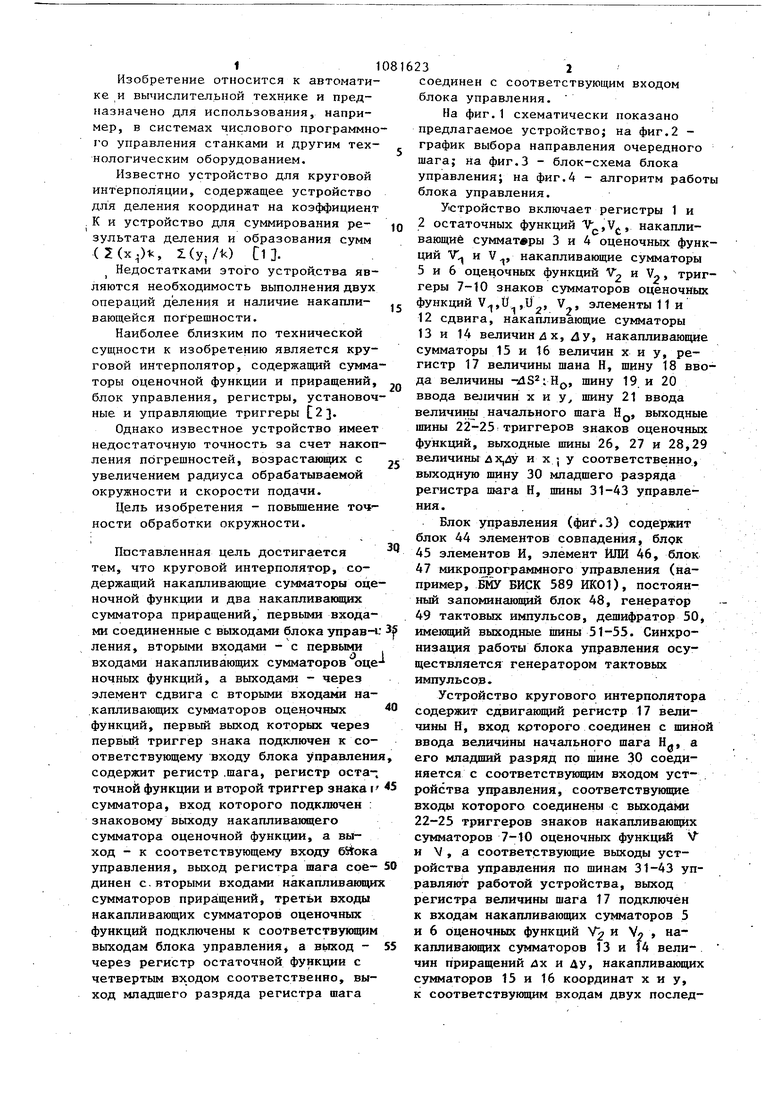
| название | год | авторы | номер документа |
|---|---|---|---|
| Интерполятор | 1987 |
|
SU1413602A1 |
| Интерполятор | 1988 |
|
SU1541557A1 |
| Линейный интерполятор | 1989 |
|
SU1674064A1 |
| Цифровой линейный интерполятор | 1989 |
|
SU1693592A1 |
| Линейный интерполятор | 1986 |
|
SU1413603A1 |
| Линейный интерполятор | 1988 |
|
SU1522157A1 |
| Линейный интерполятор | 1987 |
|
SU1439532A1 |
| Линейный интерполятор | 1986 |
|
SU1383302A1 |
| Цифровой линейный интерполятор | 1991 |
|
SU1807450A1 |
| Линейный интерполятор | 1991 |
|
SU1809421A1 |
КРУГОВОЙ ИНТЕРПОЛЯТОР, содержапщй накапливающие сумматоры оценочной функции и два накапливающих сумматора приращений, первыми входами соединенные с выходами блока управления, вторыми входами - с первыми входами накаплившощих сумматоров оценЬчнык функций, а выходами - . через элемент сдвига с вторыми входами накапливающих сумматоров оценочных функций, первый выход которых через первый триггер знака подключен к соответствующему входу блока управления, отличающи:йся тем, что, с целью повьшения точности обработки окружности, интерполятор содержит регистр шага, регистр остаточной функции и второй триггер знака сумматора, вход которого подключен к знаковому выходу накапливающего сумматора оценочной функции, а выход - к соответствукицему. входу блока управления, выход регистра шага соединен с вторыми входами -накапливаюпщх сумматоров приращений, третьи входа накапливающих сзшматоров оценочных (Л функций подключены к соответствующим выходам блока управления, а выход через регистр остаточной функции с четвертым входом соответственно, выход младшего разряда регистра шага соединен с соответствующим входом блока управления. эо 35 чЭ :А9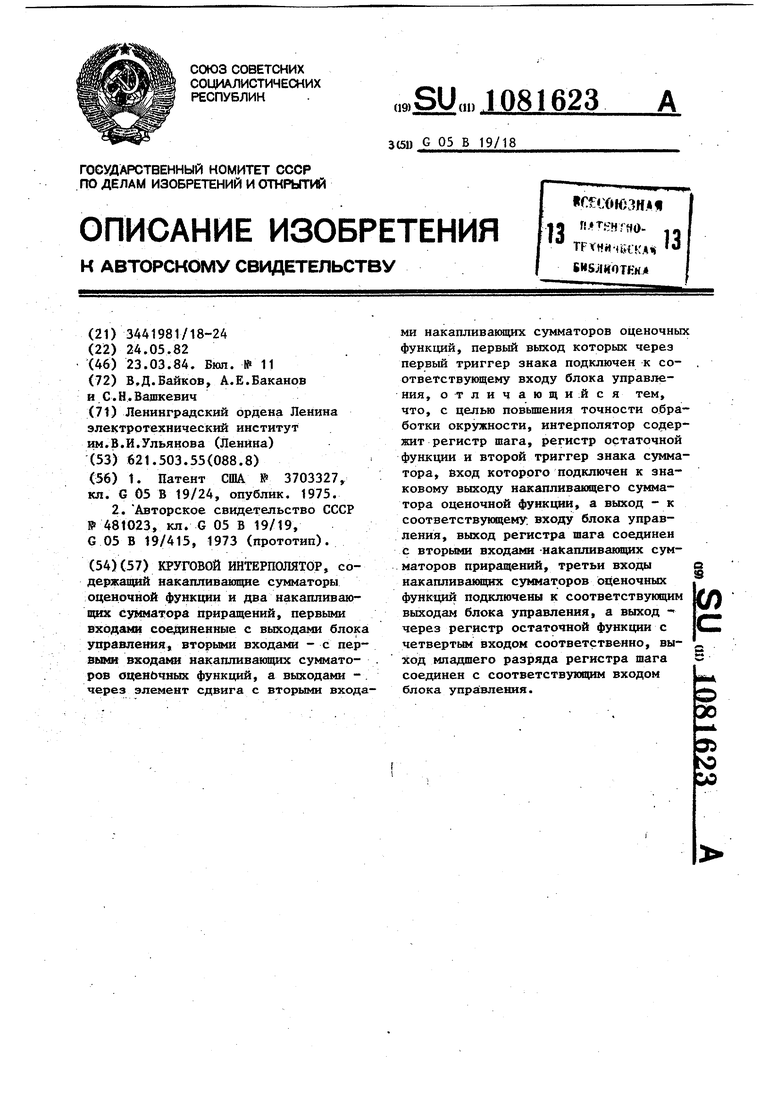
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США 3703327, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Сплав для отливки колец для сальниковых набивок | 1922 |
|
SU1975A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Интерполятор кривых второго порядка | 1973 |
|
SU481023A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
