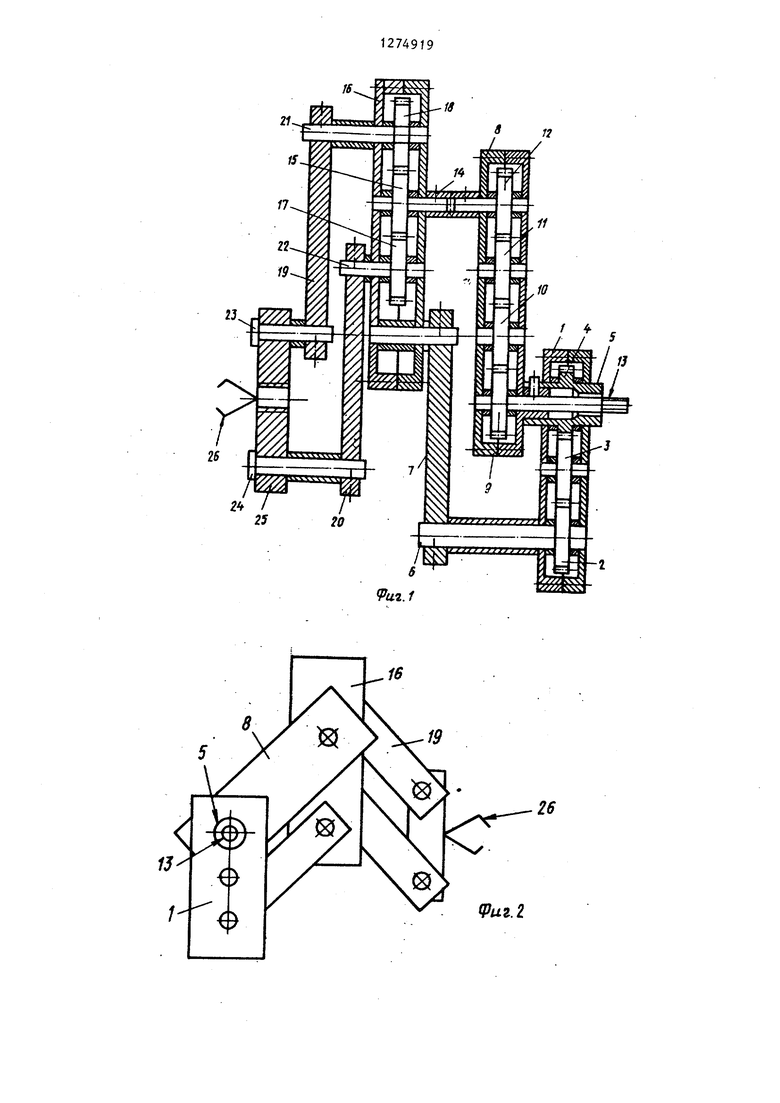
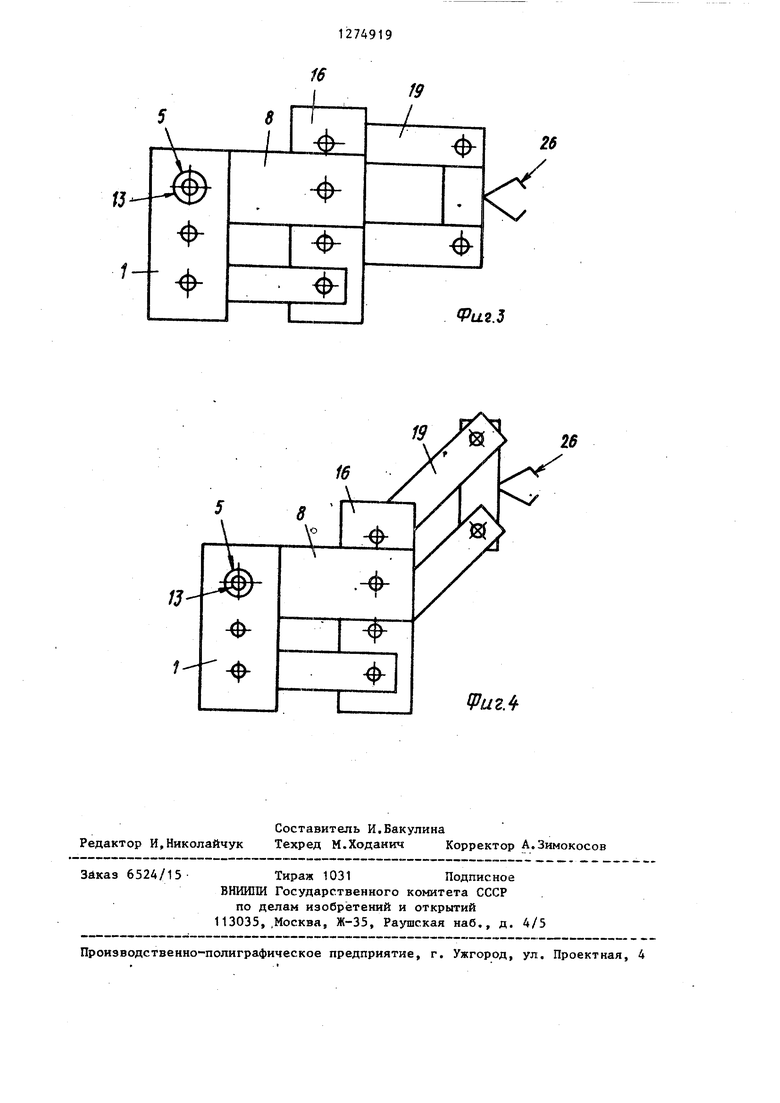
Изобретение относится к манипуляторам для механизации производственных процессов, содержащих подъемнотранспортные и другие технологические операции, а именно к исполнительным устройствам. Целью изобретения является расширение зоны обслуживания. На фиг. 1 показано исполнительное УС.ТРОЙСТВО манипулятора в разрезе,Bi сложенном состоянии; на фиг.2 - взатлм ное положение звеньев после поворота входной пары на 45 от основного привода; на фиг. 3 - то же, после поворота на на фиг. 4 - то же, после поворота на 45 от дополнительного привода. Исполнительное устройство манипулятора содержит основание 1, вьшолненное разъемным, в котором расположе ны три зубчатых колеса 2,3 и 4 с оди наковым числом зубьев, кинематически связывающих между собой валы 5 и 6, соединенные со звеньями 7 и 8 входной пары звеньев шарнирного параллелограмма. Звено 8 выполнено в виде разъемного корпуса, в котором расположено четное число (в данном случае - четыре) зубчатых колес 9 12 с одинаковым числом зубьев. Зубчатое колесо 9 скреплено с вало 13. в свою очередь связанным с основным приводным двигателем (не показан), а корпус звена 8 соединен с зубчатым колесом 4 и с валом 5, соединенным с дополнительным приводным двигателем (не показан). Вал зубчатого колеса 12 посредством втулки 14 соединен с зубчатым колесом 15 шарнира сочленений, выполненного в виде разъ емного корпуса 16, внутри которого расположены кинематически i связанные между собой зубчатые колеса 15i, 17 и 18. Звено 7 шарнирно связана с кор пусом 16. ВыходнаЯпара звеньев шарнирного параллелограмма образована звеньями 19 и 20, закрепленными на валах 21 и 22 зубчатых колес 18 и 17, а противоположные концы звеньев 19 и 20 посредством осей 23 и 24 шарнирно связаны с выходным звеном 23, к которому крепится захват 26 или ругой рабочий орган. Исполнительное устройство манипулятора работает следующим образом. При повороте вала 5 поворачивается корпус звена 8 и одновременно зубчатые колеса 3 и 2 основания 1. При этом зубчгПые колеса 4 и 2 вращаются в одну сторону, а вместе с ними звенья 7 и 8 выходной пары звеньев шарнирного параллелограмма. Зубчатое колесо 9 остановлено (вал 13 не вращается), поэтому зубчатое колесо 12 вращается в ту же сторону, что и корпус звена 8 (число колес в этом корпусе четное). Вал зубчатого колеса 12 связан с зубчатым колесом 15 шарнира сочленения, а с этим колесом кинематически связаны зубчатые колеса 17 и 18,на их валах 22 и 21 закреплены звенья 19 и 20 выходной пары. звеньев шарнирного параллелограмма, поэтому звенья 19 и 20 поворачиваются в ст /рону, противоположную направлению вращения звеньев 7 и 8. Угло-. вые скорости вращения всех звеньев одинаковы (передаточное число их равно 1). Ввиду равенства звеньев 7 и 8, 19 и 20 выходное звено 25 и захват 26 перемещаются по прямой линии (фиг. 2 и 3). При перемене направления вращения вала 5 захват 26 выдвигается в противоположную сторону. Вторую степень подвижности получают, поворачивая вал 13. При этом вращаются зубчатые колеса 9 - 12, в ту же сторону вращается зубчатое колесо 15 и в противоположную сторону звенья 19 и 20 выходного шарнирного параллелограмма. При этом выходное звено 25 совершает плоскопараллель- ное движение по окружности с радиусом, равным длине звена.
21
25
Г2
/
а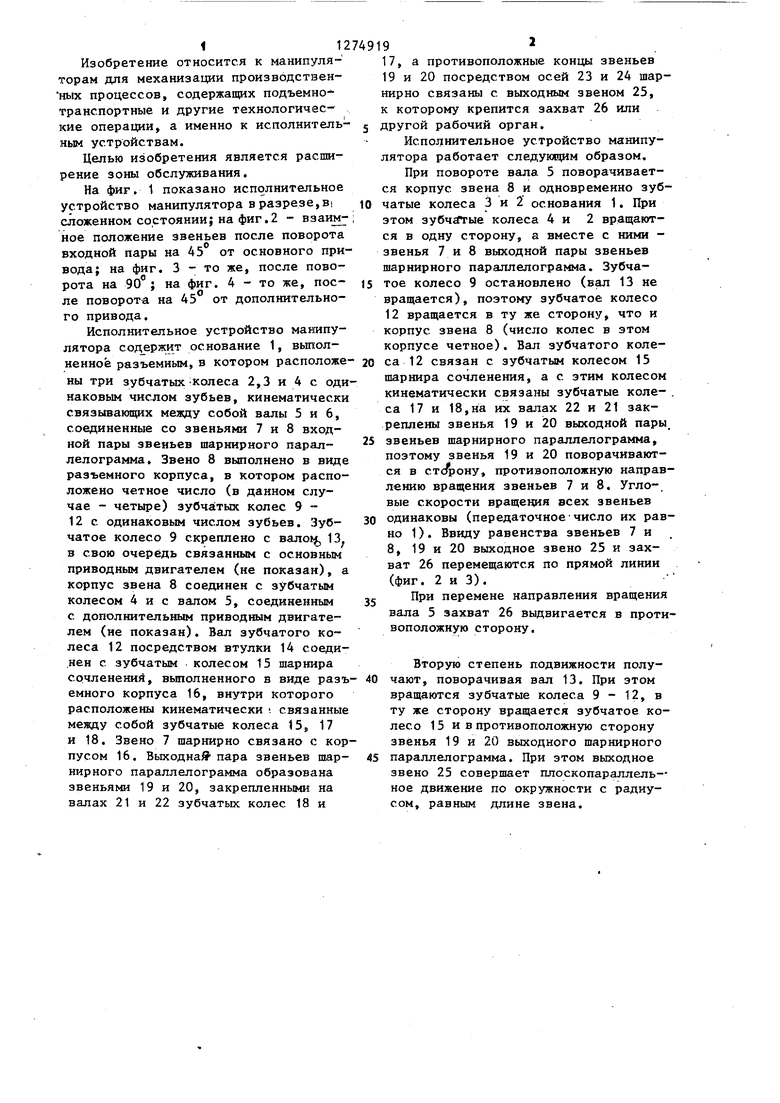
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1983 |
|
SU1115898A1 |
| Исполнительное устройство манипулятора | 1986 |
|
SU1366383A2 |
| Манипулятор | 1983 |
|
SU1151453A1 |
| Исполнительное устройство манипулятора | 1990 |
|
SU1756135A1 |
| Исполнительное устройство манипулятора | 1986 |
|
SU1414620A1 |
| Исполнительный орган манипулятора | 1987 |
|
SU1426777A1 |
| Манипулятор | 1979 |
|
SU770780A1 |
| Манипулятор | 1978 |
|
SU763080A2 |
| Рука манипулятора | 1984 |
|
SU1220781A1 |
| Манипулятор | 1977 |
|
SU659376A1 |
ИСПОЛНИТЕЛЬНОЕ УСТРОЙСТВО МАНИПУЛЯТОРА, содержащее звенья, соединенные в шарнирный параллелограмм, причем входная пара звеньев связана с основанием и с основным приводом, а выходная - с захватом, а между входной и выходной парами, звеньев расположен шарнир сочленения, содержащий кинематически связанные между собой аналогичные зубчатые колеса, из которых нечетные соединены с входной парой звеньев, а четные с выходной парой звеньев, о т л ичающееся тем, что, с целью расширения зоны обслуживания, оно снабжено дополнительный приводом, одно звено входной пары звеньев шарнирного параллелограмма выполнено в виде размещенных в общем корпусе четного числа кинематически связанных между собой зубчатых колес, при-этом входной вал зубчатого колеса этого звена соединен с основкьм приводом, а корпус этого звена - с дополнительным приводом, причем основание выполнено в виде кинематически связанных между собой нечетного числа зубчатых колес, нечетные зубчатые колеса которого связаны соответственно со звеньями входной пары шарнирного параллелограмма . to sj
16
fpuz.l
16
8
15
19
I
г
26
/
fPa2.3
13ЩигЛ
| Исполнительное устройство манипулятора | 1984 |
|
SU1202856A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
