. . 3 7 в
: Изобретение относится к обработке металлов давлением и может быть использовано для механизации и автоматизации процессов отделения плоских : заготовок от стопы и их подачи к об- :рабатывающей машине, например к прессу.
Цель изобретения - повышение на- ;дежности,
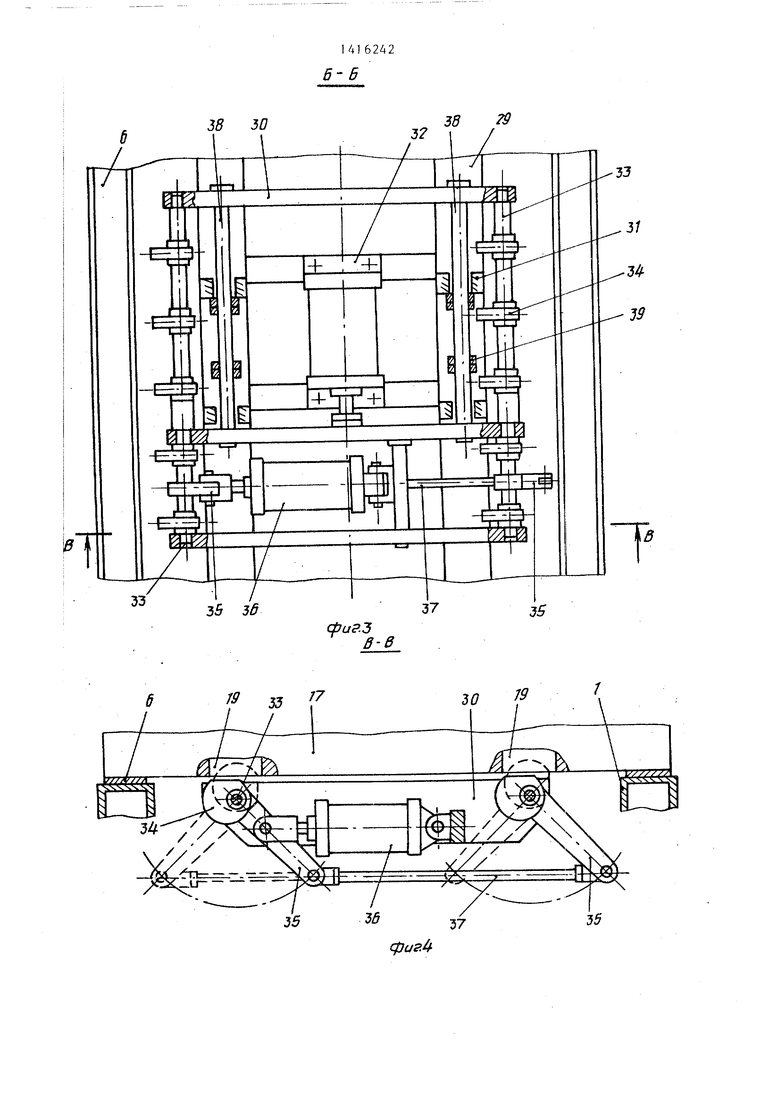
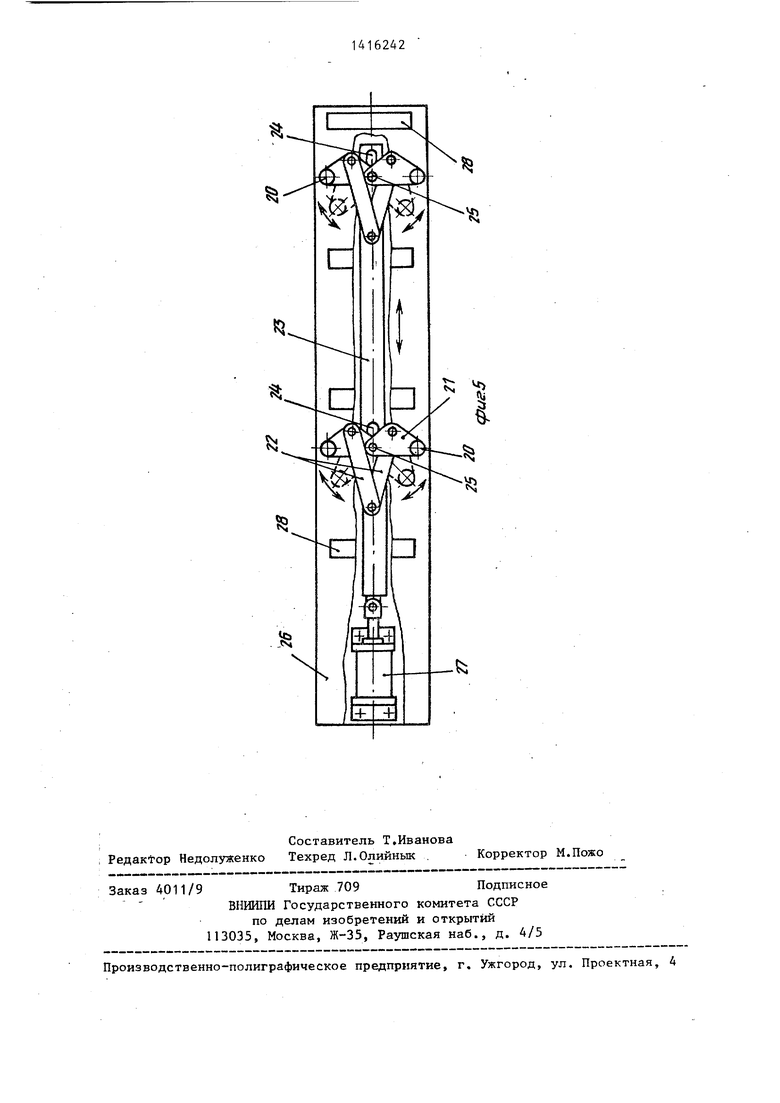
На фиг. 1 изображено устройство, общий вид; на-фиг. 2 - вид А на фиг. 1; на фиг. 3 - сечение Б-Б на фиг. 1; на фиг. 4 - сечение В-В на фиг.З; на фиг. 5 - поддерживающий рольганг, вид сверху.
Устройство содержит станину 1, на которой смонтированы механизм 2 перемещения стопы плоских заготовок, поддерживающий рольганг 3, механизм 4 перемещения отдельной заготовки к I .обрабатывающей мапшне 5, направляющие 6 и манипулятор, включающий основание 7, каретку 8, закрепленную ; на направляющих 9 с возможностью го- : ризонтального перемещения в корпусах 10 при помощи цилиндра 11, траверсу : 12, закрепленную на направ:ляющих 13 i с возможностью перемещения в корпуса I 14 при помощи цилиндра 15. Траверса I 12 имеет вакуумные захватные органы ; 16. На направляющих 6 устанавливаются кассеты 17 со стопами заготовок 18. Каждая кассета имеет в днище отверстия 19 для зах вата ее механизмом перемещения. Поддерживающий рольганг 3 состоит, из механизма ориентирования отдельной заготовки, включающего две пары роликов 20, установленных на рычагах 21, шарнирно соединенных планками 22 с продольной тягой 23. Рычаги 21 и продольная тяга 23, имеющая сквозные овальные пазы 24, установлены на осях 25, жестко закрепленных на корпусе 26. Продольная тяга 23 шарнирно соединена со штоком цилиндра 27, жестко закрепленного на корпусе 26. На корпусе 26 жестко установлены ложементы 28, на которые укладывается плоская заготовка перед подачей ее в обрабатывающую машину 5 Механизм перемещения 2 стопы плоских заготовок состоит из основания 29, жестко связанного со станиной 1, подвижной жесткой рамы 30, установленной с возможностью возвратно-поступательного перемещения в подшипниках 31 скольжения и силового цилиндра 32 закрепленных на основании 29, валов
5 О 5 Q
5
33, с жестко установленными на них кулачками 34 и рычагами 35, и цилиндра 36 поворота валов. Шток силового цилиндра 32 шарнирно соединен с рамой 30, шток цилиндра 36 шарнирно связан с одним из рычагов 35. Валы 33 взаимодействуют межр,у собой при помощи рь чагов 35 и шарнирно соединенной с ними тяги 37, На стержнях 38 рамы 30 установлены регулируемые упоры 39, ограничивающие ее перемещение.
Устройство работает следующим образом.
Кассету 17 со стопой заготовок 18 устанавливают- на направляющие 6 станины 1. По команде с пульта управления (не показан) включают механизм 2 перемещения стопы плоских заготовок. При этом цилиндр 36 с помощью рычагов 35 и тяги 37 поворачивает валы 33 с кулачками 34, которые заходят в отверстия 19 в днище кассеты 17, Затем силовой цилиндр 32 передвигает раму 30 до взаимодействия упоров 39 с корпусами подшипников 31 скольжения, жестко установленными на основании 29, После этого кулачки 34 выводятся из зацепления с кассетой 17 посредством рычагов 35 и тяги 37, соединенной с цилиндром 36. Силовой цилиндр 32 возвращает раму 30 в исходное положение . На направляющие 6 устанавливается следующая кассета и цикл перемещения повторяется, причем предьщу- щую кассету перемещает следующая пара кулачков 34, установленных на валах 33, Всего на направляющие 6 устанавливается 4 кассеты, заполненные плоскими заготовками. Ориентация кассеты 17 относительно вакуумных захватных органов 16 осуществляется соответствующей установкой регулируемых упоров 39, Далее по команде с пульта управления (не показан) траверса 12 под действием цилиндра 15 опускается до контакта вакуумных захватных органов 16 с поверхностью плоской заготовки. После захвата заготовки вакуумными захватными органами 16 траверса 12 движется вверх, а затем под действием цмлиндра 11 - в горизонтальном направлении, укладывая плоскую заготовку на ложементы 28 между роликами 20 поддерживающего рольганга 3, После этого траверса возвращается в исходное положение (над кассетой с плоскими заготовками), Цилиндр
27 перемещает продольную тягу 23, которая в свою очередь через планки 22 поворачивает рычаги 21.. Ролики 20, установленные на рычагах 21, дни- гаясь по дуге окружности, сближаются между собой и тем самым точно ориентируют плоскую заготовку различной ширины относительно продольной оси поддерживающего рольганга 3. Затем механизм 4 перемещения отдельной заготовки подает ее в обрабатывающую машину 5, а в это время траверса 12 при помощи вакуумных захватных органов 16 захватывает следующую заготов- ку. Как только плоская заготовка из поддерживающего рольганга 3 уходит в обрабатывающую машину 5, ролики 20 под действием цилиндра 27 возвращаются в исходное положение, а траверса 12 укладывает на ложементы 28 следу- ющую заготовку. Когда в кассете не останется заготовок, механизм 2 перемещения стопы заготовок подает следующую полную кассету в зону деист- ВИЯ траверсы 12, продвигая пустую кассету по направляющим 6 на выход из устройства. Пустая кассета удаляется из устройства грузоподъемными средствами. Все операции по транс
g ю 1520, 2516242
товок и перемещению отдельной заго- товки совершаются в автоматическом цикле,
Формула изобретения
Устройство для отделения плоской заготовки от стопы и подачи ее к обрабатывающей машине, содержащее станину, на которой смонтирована подвижная траверса с захватными ор-/ ганами, привод перемещения траверсы, механизм перемещения кассеты для стопы заготовок,механизм ориентации отдельных заготовок с поддерживающим рольгангом, имеющим поворотные ролики, о т л и- чающееся тем, что, с целью повьшгения надежности, механизм перемещения кассеты для стопы заготовок выполнен Б виде нескольких пар кулачков, расположенных на подвижной раме, и входящих в отверстия в днище кассеты при ее захвате, причем на подвижной раме з становлены регулируемые упоры для ориентации кассеты с заготовками относительно траверсы с захватными органами, механизм ориентации отдельных заготовок снабжен индивидуальным приводом, кинемати- чески связанным с поворотными роли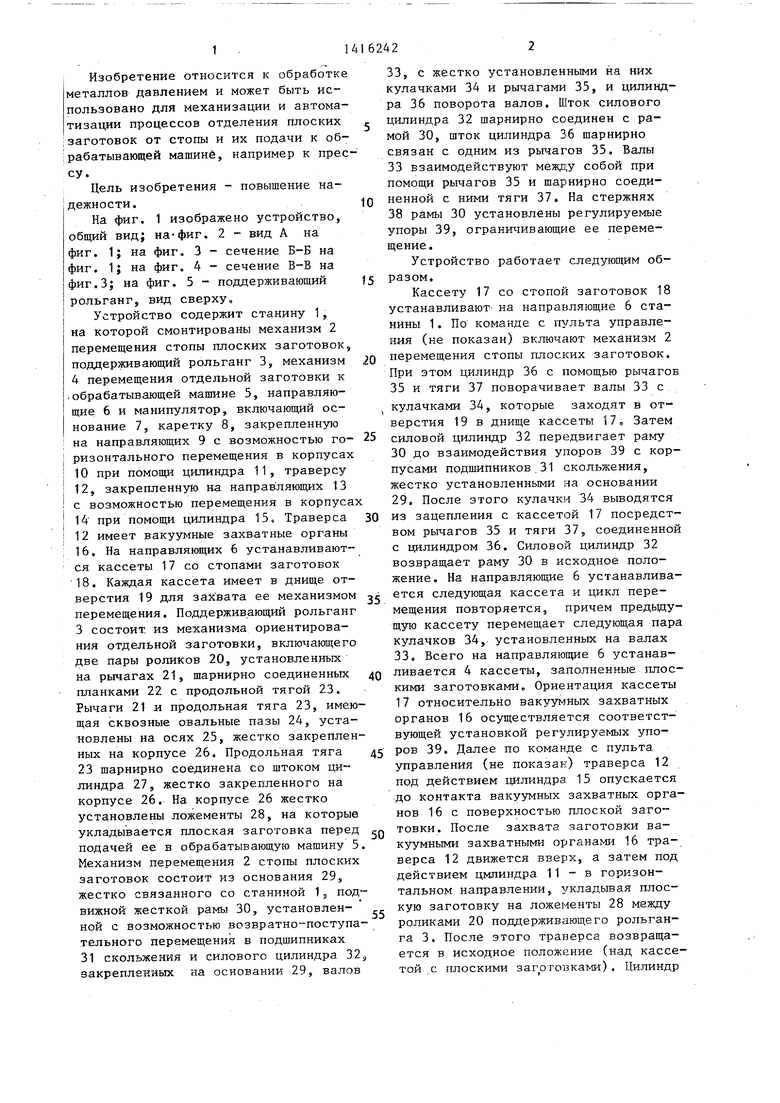

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для отделения плоской заготовки от стопы и подачи ее к обрабатывающей машине | 1983 |
|
SU1098623A1 |
| Устройство для отделения плоской заготовки от стопы | 1986 |
|
SU1324727A1 |
| Устройство для отделения листовой заготовки от стопы и подачи ее к обрабатывающей машине | 1987 |
|
SU1397128A1 |
| Устройство для отделения листовых заготовок от стопы и подачи их в пресс | 1985 |
|
SU1268257A1 |
| Устройство для определения листовых заготовок от стопы и подачи их в пресс | 1984 |
|
SU1183254A1 |
| Устройство для отделения листовой заготовки от стопы и подачи ее в зону обработки | 1988 |
|
SU1611524A1 |
| Устройство для отделения листовых заготовок от стопы и подачи их в пресс | 1982 |
|
SU1013044A1 |
| Устройство для отделения верхнего листа от стопы и подачи его к обрабатывающей машине | 1981 |
|
SU967630A1 |
| РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ МНОГОПЕРЕХОДНОЙ ШТАМПОВКИ | 1993 |
|
RU2082527C1 |
| Стройство для отделения листа от стопы и подачи его к обрабатывающей машине | 1975 |
|
SU572320A1 |
Изобретение относится к обра ботке металлов давлением и м.б. использовано для механизации и автоматизации процессов отделения плоских заготовок от стопы и их подачи к обрабатывающей машине. Цель - повьше- ние надежности. Устройство содержит станину 1, на которой смонтирован механизм перемещения 2 стопы плоских заготовок, .находящейся в кассете 17. Механизм перемещения 2 состоит из основания, на котором закреплены подвижная рама с жестко установленными на валах кулачками, посредством которых перемещаются кассеты 17. В днище кассеты 17 находятся отверстия под кулачки. Механизм перемещения 2 включается сразу после того, как кассету 17 устанавливают на направляющие, закрепленные на станине 1. Кассеты 17 на раме ограничиваются регулируемыми упорами. Это обеспечивает их точную ориентацию относительно захватных органов 16. После захвата загото вки вакуумньп га захватнь1ичи органами она укладывается на ложементы между роликами рольганга 3. Ролики установлены на рычагах, кинематически связанных с силовым цилиндром. Сближаясь мелщу собой, они точно ориентир тот плоскую заготовку различной ширины продольной оси рольганга 3. Затем механизм перемещения 4 подает ее в обрабатывающую машину, 5 ил. ф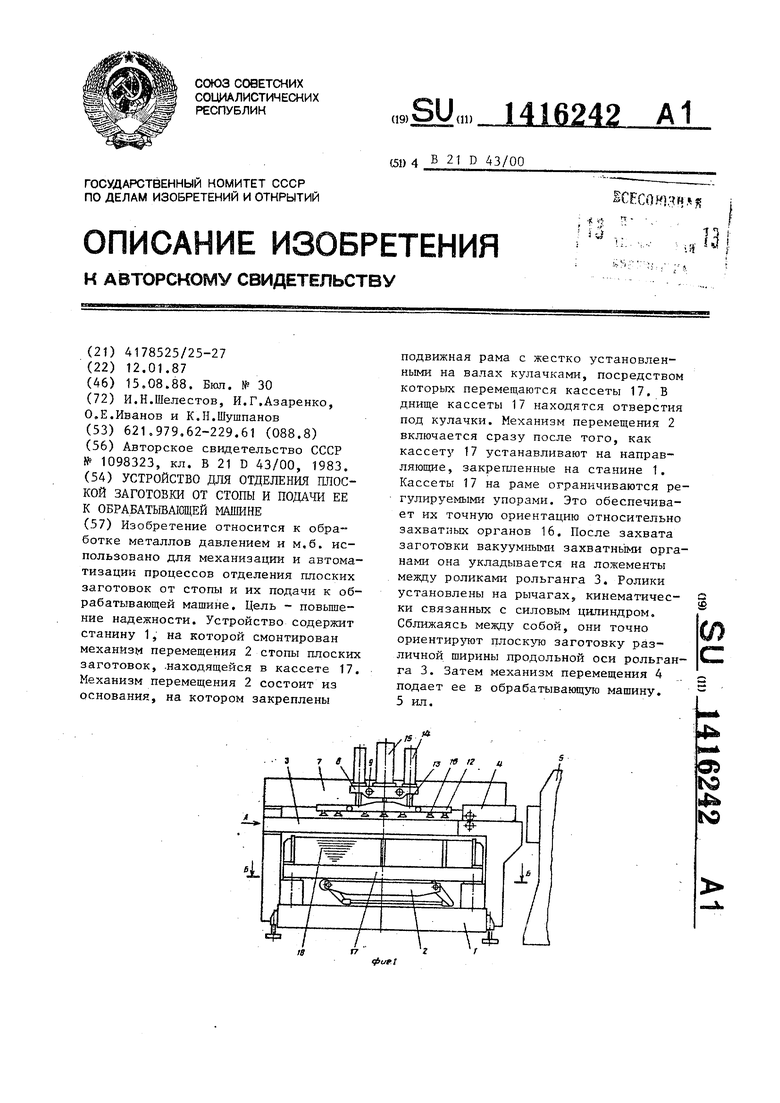
портированию кассет со стопой заго-я зл ками рольганга.
lAl6242 6-6
38 30
33
ciii.U
38 29
33
фигЛ
| Авторское свидетельство СССР № 1098323, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
