| название | год | авторы | номер документа |
|---|---|---|---|
| Трелевочная каретка | 1985 |
|
SU1271781A1 |
| Трелевочная каретка канатной дороги | 1985 |
|
SU1257007A2 |
| Трелевочная каретка | 1981 |
|
SU998187A1 |
| Трелевочная каретка подвесной канатной дороги | 1986 |
|
SU1355527A1 |
| Трелевочная каретка канатной дороги | 1983 |
|
SU1115950A1 |
| Трелевочная установка | 1973 |
|
SU467876A1 |
| Трелевочная каретка | 1982 |
|
SU1044512A2 |
| Трелевочная каретка канатной дороги | 1985 |
|
SU1306778A1 |
| Трелевочная каретка | 1977 |
|
SU617310A1 |
| КАНАТНАЯ УСТАНОВКА ДЛЯ ПОЛУПОДВЕСНОЙ БЕСЧОКЕРНОЙ | 1968 |
|
SU211561A1 |
Изобретение относится к подъемно-транспортному оборудованию, а именно к устройствам для трелевки леса с помощью канатных установок. Цель изобретения - повышение надеж.ности захвата и удержания дерева. Трелевочная каретка содержит ходовую тележку 1 и кронштейн 2, навешенные соответственно на несущую и возвратную ветви тягово-несущего каната и соединенные посредством соединительных рычагов 10 с грузозахватным органом, включающим в себя челюсти 6 с приводными рычагами 7, установленные на оси 8. Соединительные рычаги 10 установлены с возможностью взаимодействия с приводными рычагами 7 на оси 8. Между соединительными рычагами 10 установлен фиксатор их горизонтального положения, при котором челюсти 6 раскрыты. Для захвата дерева на него опускают грузозахватный орган, ослабляя натяжение тягово- несущего каната и расцепляют фиксатор При поднятии грузозахватного органа соединительные рычаги 10 поворачиваются и смыкают чел1ости 6. 4 ил. (С (Л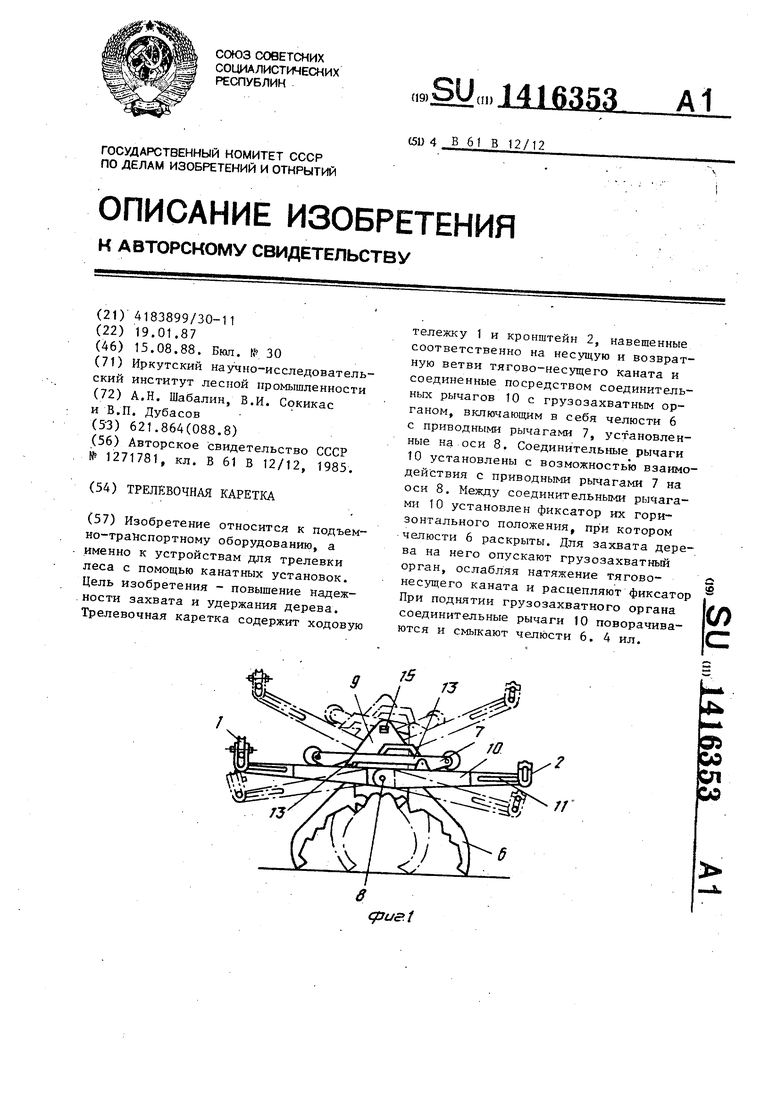
дзиг.1
Изобретение относится к подъемно- :транспортному оборудованию, а именно I к устройствам для трелевки леса с по iмощью канатных установок. : Цель изобретения - повышение на- ; дежности захвата и удержания дерева.
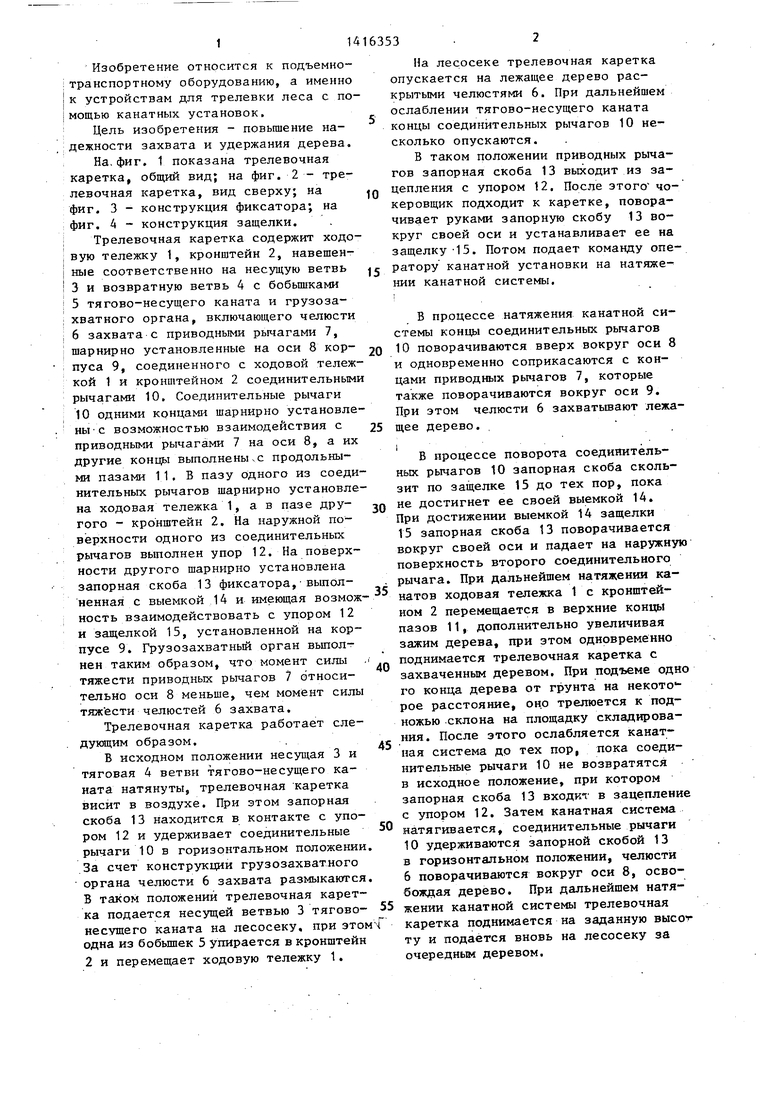
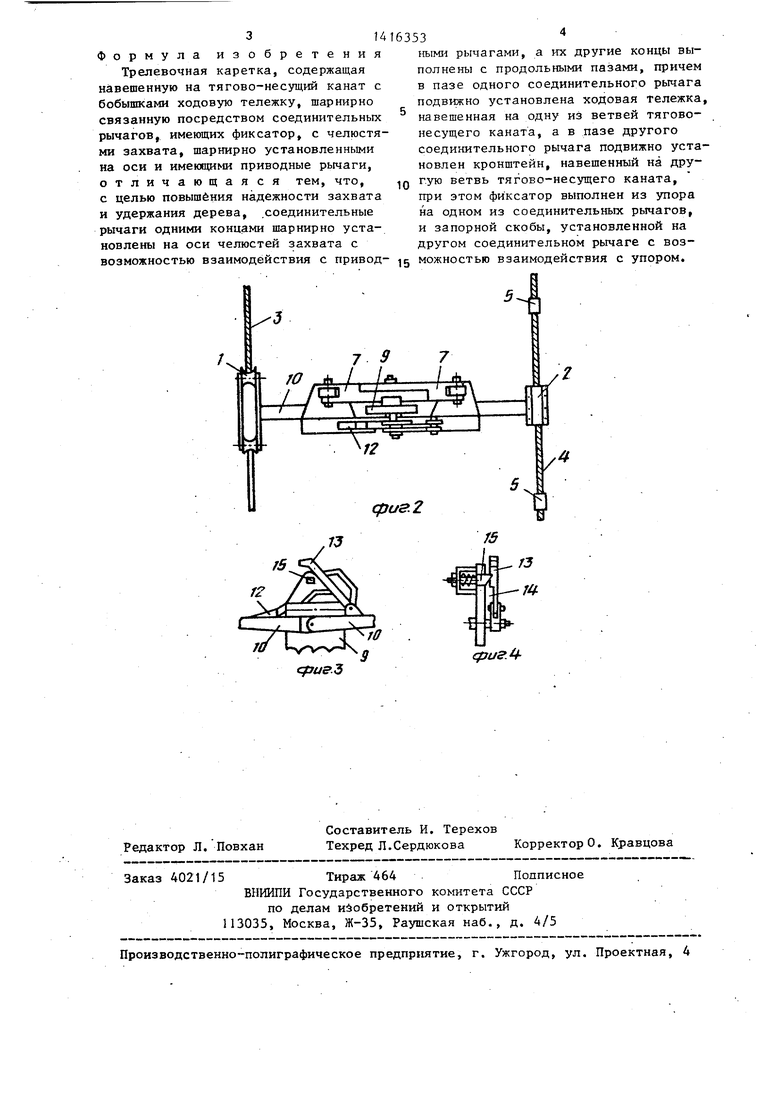
На, фиг, 1 показана трелевочная каретка, общий вид; на фиг. 2 - трелевочная каретка, вид сверху; на фиг. 3 - конструкция фиксатора; на фиг. А - конструкция защелки.
Трелевочная каретка содержит ходовую тележку 1, кронштейн 2, навещенные соответственно на несущую ветвь 3 и возвратную ветвь 4 с бобьщ|ками
5тягово-несущего каната и грузозахватного органа, включающего челюсти
6захвата с приводными рычагами 7, шарнирно установленные на оси 8 корпуса 9, соединенного с ходовой тележкой 1 и кронштейном 2 соединительньп рычагами 10. Соединительные рычаги
10 одними концами щарнирно установлены -с возможностью взаимодействия с приводными рычага1ми 7 на оси 8, а их другие концы выполнены ч с продольными пазами 11. В пазу одного из соединительных рычагов щарнирно установлена ходовая тележка 1, а в пазе дру- того - кронштейн 2. На наружной поверхности одного из соединительных рычагов выполнен упор 12. На поверхности другого щарнирно установлена запорная скоба 13 фиксатора,-выполненная с выемкой 14 и имеющая возможность взаимодействовать с упором 12 и защелкой 15, установленной на корпусе 9. Грузозахватньш орган вьшол- нен таким образом, что момент силы тяжести приводных рычагов 7 относительно оси 8 меньше, чем момент силы тяж ести челюстей 6 захвата.
Трелевочная каретка работает следующим образом.
В исходном положении несущая 3 и тяговая 4 ветви тягово-несущего каната натянуты, трелевочная каретка висит в воздухе. При этом запорная скоба 13 находится в контакте с упором 12 и удерживает соединительные рычаги 10 в горизонтальном положении За счет конструкции грузозахватного органа челюсти 6 захвата размыкаются В таком положений трелевочная каретка подается несущей ветвью 3 тягово- несущего каната на лесосеку, при этом одна из бобьшек 5 упирается в кронштейн 2 и перемещает ходовую тележку 1.
0
5
л
с
Q
5
5
0
5
0
На лес-осеке трелевочная каретка опускается на лежащее дерево раскрытыми челюстями 6. При дальнейшем ослаблении тягово-несущего каната концы соединительных рычагов 10 несколько опускаются.
В таком положении приводных рычагов запорная скоба 13 выходит из зацепления с упором 12. После зтого чо- керовщик подходит к каретке, поворачивает руками запорную скобу 13 вокруг своей оси и устанавливает ее на защелку-15. Потом подает команду оператору канатной установки на натяже- НИИ канатной системы.
В процессе натяжения канатной системы концы соединительных рычагов 10 поворачиваются вверх вокруг оси 8 и одновременно соприкасаются с концами приводных рычагов 7, которые также поворачиваются вокруг оси 9. При этом челюсти 6 захватьшают лежащее дерево.
I
В процессе поворота соединительных рычагов 10 запорная скоба скользит по защелке 15 до тех пор, пока не достигнет ее своей выемкой 14. При достижении выемкой 14 защелки 15 запорная скоба 13 поворачивается вокруг своей оси и падает на наружную поверхность второго соединительного рычага. При дальнейшем натяжении канатов ходовая тележка 1 с кронштейном 2 перемещается в верхние концы пазов 11, дополнительно увеличивая зажим дерева, при зтом одновременно поднимается трелевочная каретка с захваченным деревом. При подъеме одно го конца дерева от грунта на некото - рое расстояние, оно трелюется к подножью склона на площадку складирования. После зтого ослабляется канатная система до тех пор, пока соединительные рычаги 10 не возвратятся в исходное положение, при котором запорная скоба 13 входит в зацепление с упором 12. Затем канатная система натягивается, соединительные рычаги 10 удерживаются запорной скобой 13 в горизонтальном положении, челюсти 6 поворачиваются вокруг оси 8, освобождая дерево. При дальнейшем натяжении канатной системы трелевочная каретка поднимается на заданную высог ту и подаётся вновь на лесосеку за очередным деревом.
/5
/-
CfJUS.Z
| Трелевочная каретка | 1985 |
|
SU1271781A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
