Изобретение относится к подъемно транспортным механизмам и предназначено для установки, например, на штанге или подъемнике перегрузочной машины ядерной энергетической установки. Наиболее целесообразна установка такой системы в тех .случаях, когда подъемно-транспортный механизм работает в замкнутом помещении без присутствия наблюдаемого персонала с дистанционным или автоматическим управлением из обслуживаемого помещения о
Целью изобретения является расши- рение диапазона контроля измерения веса грузов при различной величине начального веса.
На чертеже изображена структурная схема устройства
Устройство содержит блок 1 измерения веса груза, подключенный к блоку 2 смещения начала отсчета. Последний состоит из сумматора 3, блока 4 согласования, интегратора 5 и блока 6 размножения сигнала. Выход блока 2 подключен к сумматору 7, который через блок 8 согласования соединен с выходным реле 9, контакты 9,1 кот оро- го введены в цепи управления электро- двигателя устройства перемещения груза (например, штанги перегрузочной машины), Задатчих. Ю допустимой величины изменения веса подключен на второй вход сумматора 7, выход йнтег- ратора 5 через блок 6 и блок 11 нели нейности подсоединен на третий вход сумматора 7« Блок 12 формирования условий переключения подключен к выходному реле 13, его нормально .отк- рытые контакты 13о1 введены в цепь между блоком 2 и сумматором 7, а нормально закрытые контакты 13«2 - в цепь между блоком 4 согласования и интегратором 5 блока
Блок 1 в общем случае может состоять из датчика веса, например тен- зорезисторного усилителя и нормирующего преобразователя Блоки 4 и 8 согласования в зависимости от конкретных условий могут быть реализованы в виде усилителя, нормирующего преобразователя, преобразователя напряжения в ток или наоборот и т«п. Блок 12 может быть реализован, например, в виде схемы, получающей сигналы о достижении элементов подьемно- транспортного механизма определенных положений (например, сигнал о дости
п 5
0
жении определенного угла поворота захвата штанги перегрузочной машины) и включающей реле 13
Устройство работает следующим образом
После установки груза (например, на штанге) блок 1 формирует сигнал, пропорциональный весу груза и подает его на блок 2. Сумматор 3 этого блока воспринимает сигнал и через блок 4 согласования, контакты 13,2 реле 13 подает его на интегратор 5« Последний вырабатьгоает сигнал, пропорциональный сигналу с блока I и подает его через блок 6 на второй вход сумматора 3 со знаком, обратным знаку сигнала с блока 1, балансируя та- КИМ образом блок 2 на установленный на штанге вес, После балансировки на выходе блока 4 сигнал равен нулю.
После выполнения некоторых технологических операций, например поворота штанги в определенное положение и захвата груза, блок 12 вырабатывает сигнал на включение реле 13, которое размыкает свой контаХт 13,2 и замыкает контакт , При этом на интеграторе 5 запоминается SHa чение установленного на штанге веса .ив дальнейшем он будет уже играть роль задатчика, сигнал которого пропорционален начальному значению веса Блок 2 подключается через контакт 13.1 к сумматору 7, в котором пpoизвoдиtcя сравнение сигнала с выхода блока 2 и сигнала от задатчика 10. Если вес груза во время его перемещения не меняется, то на выходе сумматора 7 остается сигнал,пропорциональный сигналу задатчика 10, Через блок 8 согласования сигнал проходит на реле 9« В этом состоянии контакты 9.1 замкнуты. Система автоматического управления перемещения груза или элемента механизма, на котором размещен груз, включает электродвигатель и начинает перемещать груз,
Если же вес груза во время перемещения изменился (например, груз зацепился за элементы оборудования), то на выходе блока I сигнал .изменится пропорционально изменению веса, а на выходе сумматора 3 появится , пропорциональный отклонению текуп1его значения веса от первоначального запомненного на интегра3,д
торе 5, Этот сигнал через блок 4 и контакты 13,1 поступает на сумматор 7, где и вычитается из сигнала от задатчика 10, Когда величина изменения веса достигнет допустимой величины, установленной задатчиком 10, сигнал на выходе блока 8 станет равным нулю, реле 9 обесточится, а его контакты 9.1 разомкнутся и остановится электродвигатель, а следовательно, и перемещение груза.
Блок 11 корректирует заданную величину изменения веса груза в зависимости от величины начального веса груза.
Формула изобретения
Устройство для защиты двигателя подъемно-транспортного механизма от перегрузки, содержащее блок измерения веса груза, связанный с блоком смещения начала отсчета, и выходную цепь с элементами отключения питания
6423
в цепи двигателя, отличающееся тем, что, с целью расширения диапазона контроля изменения ве- с са грузов при различной величине начального веса, оно снабжено суммато- . ром, задатч эсом допустимой величины изменения веса, подключенньм к одному из его входов, блоком нелинейносto ти, подключенным к другому входу сумматора, и блоком формирования условий: переключений с выходным реле, через замыкающий контакт которого первый выход блока смещения начала отсчета
15 связан с третьим входом сумматора, при этом блок смещения начала отсчета содержит на входе сумматор, связанный через размыкающий контакт выходного реле с его выходом интегра20 тор и блок размножения сигнала, при этом один из выходов блока размножения подключен к другому входу сумматора, а другой является другим выходом блока смещения начала отсчета и
25 соединен с входом блока нелинейности.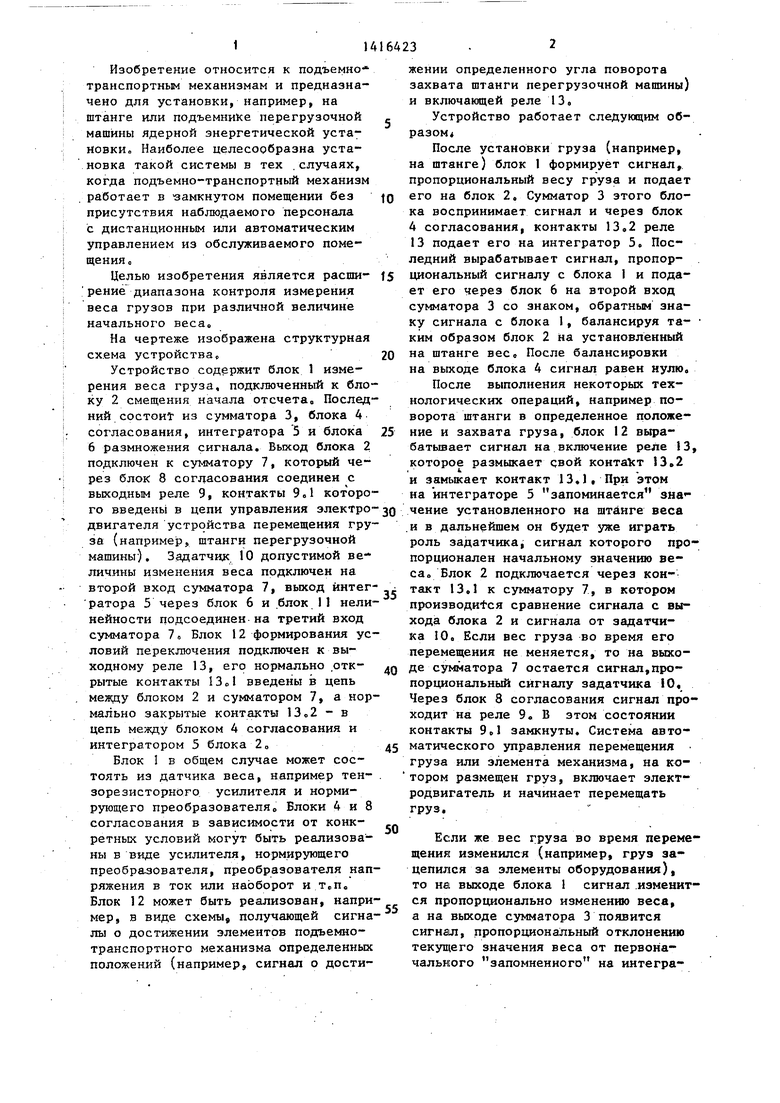
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управляющей электродвигателем буровой лебедки и устройство для его осуществления | 1989 |
|
SU1705994A1 |
| Устройство контроля содержания углерода в ванне конвертера | 1983 |
|
SU1097684A1 |
| Способ управления механизмом передвижения подвешенного на канате груза | 1987 |
|
SU1472417A1 |
| Устройство для автоматическойпОгРузКи СыпучиХ гРузОВ ВдВижущиЕСя ТРАНСпОРТНыЕ СРЕдСТВА | 1978 |
|
SU806579A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| Устройство для управления приводом механизма горизонтального перемещения груза на гибком подвесе | 1990 |
|
SU1803379A1 |
| Дозатор сыпучих материалов | 1985 |
|
SU1317286A1 |
| Многодвигательный частотно-регулируемый электропривод | 1988 |
|
SU1598256A1 |
| Устройство для тепловой защиты электродвигателя | 1985 |
|
SU1309158A2 |
| Устройство управления дуговой сваркой | 1987 |
|
SU1505705A1 |
Изрбретение относится к подъем- но-транспортньм механизмам, рабо- тающим в замкнутом помещении с дис- танщ{онным или автоматическим управ- лением. Целью изобретения является расширение диапазона контролируемых грузов при различной величине начального веса. Устройство содержит сумматор 7, на котором алгебраически суммируются сигналы с выхода задатчика 10 допустимой величины изменения веса и с выхода блока 1 измерения веса через блок 2 смещения начала отсчета. При достижейии изменения ве са вьше допустимого сигнал на выходе блока 8 согласования становится равным нулю, реле 9 обесточиваемя и его контакты 9.1 в цепи электродвигателя размыкаются, остановив двигатель, а следовательно, и перемещение груза. Блок 1 1 нелинейности ректирует заданную величину веса грУ за в зависимости от величины начвль ного веса груза, 1 ял Л С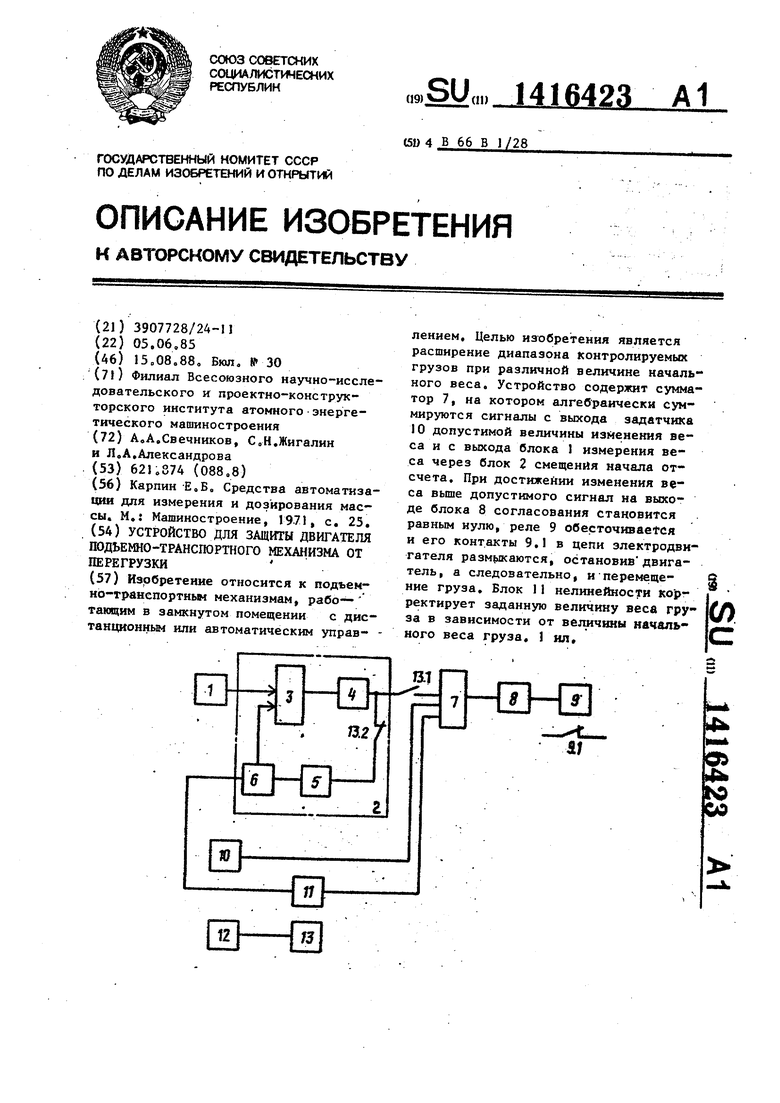
| Карпин Е.Б | |||
| Средства автоматизации для измерения и дозирования массы, М, Машиностроение, 1971, с, 25, |
