1
Изобретение относится к подъемнотранс- портным приводам, а именно к способам управления механизмами передвижения подвешенных на канатах грузов..
Цель изобретения - повышение надежности.
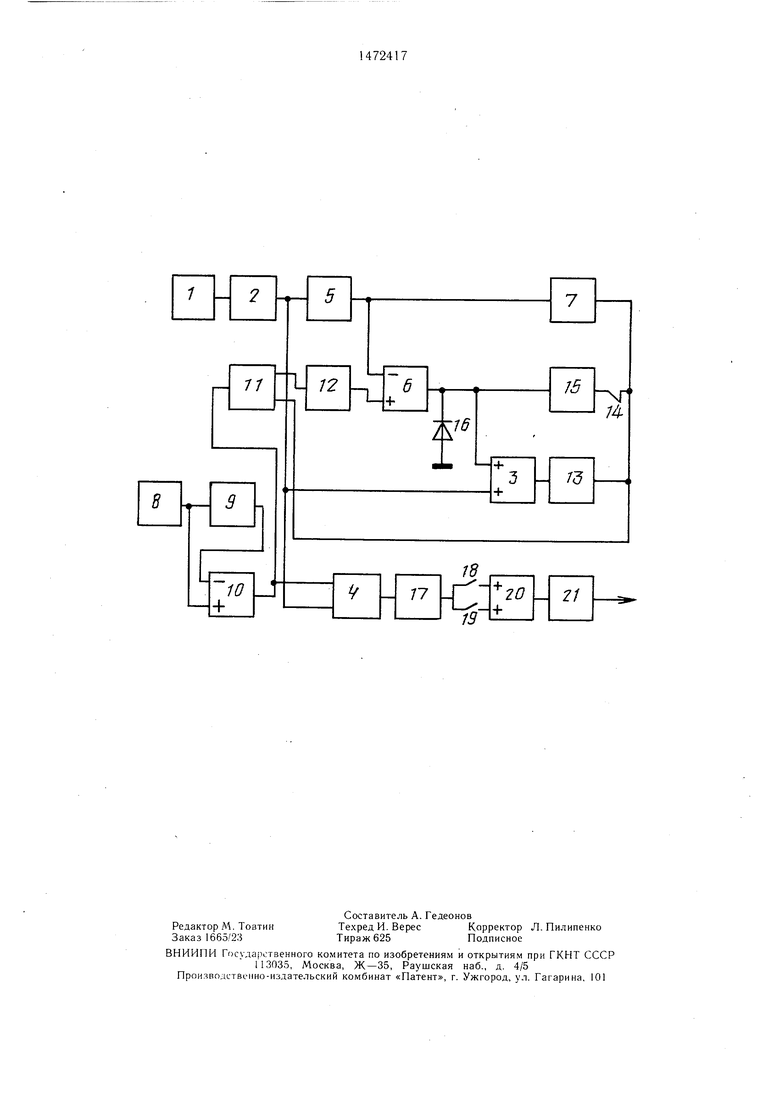
На чертеже изображена функциональная схема устройства, реализующего способ.
Согласно предложенному способу управления на первом временном интервале, равным полупериоду собственных колебаний груза, воздействуют на механизм передвижения силой, амплитуда которой равна
2Й
F a- m +а-т2-(-со5Г)+Гс, (I)
где а - заданное ускорение механизма;
mi - масса механизма передвижения;
mz - масса груза;
t - время;
Т - период собственных колебаний груза; .
FC - сила сопротивления движению.
Для повышения производительности значение ускорения на первом интервале определяют по расчетной формуле
a F-n-Fc 2(п1,
(Z)
(О
где Fm - наибольшее допустимое усилие;
т2н - номинальная масса груза.
На втором временном интервале уста- наливают амплитуду воздействующей на механизм силы, равной
(mt+m2)+Fc. (3)
Уг-у;
2а
Продолжительность второго временного интервале равна
Т
СЮ
где 1/1 - начальная скорость механизма
передвижения;
Vs - заданная конечная скорость механизма передвижения. Продолжительность третьего временного интервала и амплитуда воздействующей на нем силы вычисляются по соответствующим зависимостям первого временного интервала.
4:
to
Устройство для реализации способа содержит датчик 1 длины каната, выход которого подключен к входу нелинейного элемента 2. Сигнал с выхода элемента 2 подается на вход усилителя 3, на вход блока 4 деления и через пропорциональное звено 5 на вход сумматора 6 и задающий вход реле 7 времени. Командоаппарат 8 подключен к запоминающему блоку 9 и к сумматору 10. Выход блока 9 подключен к вычитаюсумматора 20 и начинает отсчитывать время, сигнал на выходе интегратора 21 измeняJ ется с интенсивностью, соответствующей ускорению.
Через время выдержки реле 15 последнее отключается и формируется третий этап с ускорением аь Затем реле 13 отключается и сигнал на выходе интегратора 21 становится неизменным, соответствующим новому заданному значению скорости. В момент
10 Выход блока 9 подключен к вычитаю- вому заданниму jHa4cnn,w,,xv..pv.v,.r,. ......
илему входу сумматора 10, выход которого 0 отключения реле 13 происходит также запо- } j .„ ., ,.,,,,,,riomjo Ljnnnrn няирния ГИГНЯ.ПЯ задания в
подсоединен к входу блока 4 деления и через выпрямитель 11 и пропорциональное звено 12 к входу сумматора 6. Логический выход выпрямителя .Ц подключен к разрешающим входам реле 7 времени и реле 13 времени и через контакт 14 реле 7 к разрещаю- щему входу реле 15 времени.
Выход сумматора 6 подсоединен к задающему входу реле 15, диоду 16 и сумматору 3. Выход сумматора 3 подключен к задающему
15
минание нового значения сигнала задания в блоке 9.
Формула изобретения
Способ управления механизмом передвижения подвешенного на .канате груза, согласно которому осуществляют последовательно разгон, механизма передвижения на трех временных интервалах от начальной
Выход сумматора л подключен к ладсииш.,л ,....,-г
входу оеле 13 Выход блока 4 деления через 20 до заданной конечной скорости путем воз- олхум к - «о in гчлплттойг тот а ия ри.гтпи И пппелеляют nojivD. j s iiiv-.Tj.- -..- f
схему 17 ограничения, контакты 18, 19 реле 15, 13 и сумматор 20 подсоединен к интегратору 21, выход которого подключается к управляющему входу электропривода механизма передвижения.
Устройство работает следующим образом.
Нелинейный элемент 2 преобразует сигнал датчика 1 длины в напряжен ие, пропорциональное периоду колебаний груза.
Выходные напряжения командоаппарата 8 и запоминающего блока 9 в исходном состоянии равны, реле 7, 13, 15 времени отключены, напряжение на выходе интегратора 21 не изменяется.
При переводе рукоятки командоаппарата 8 в новое положение на выходе пропорционального звена 12 сигнал соответствует минимальному времени переходного процесса.
действия на него силой и определяют полупериод собственных колебаний груза, амплитуду силы сопротивления движению и массу груза, отличающийся тем, что, с целью повы- 25 щения надежности, задают первый и третий временные интервалы равными полупериоду свободных колебаний груза, длительность второго временного интервала t определяют по формуле
. Т .
5
2а
рде vi - начальная скорость механизма; V2 - заданная конечная скорость меха низма;
25 а - заданное ускорение механизма на первом временном интервале;
7 период собственных колебаний
груза,
причем амплитуду воздействующей на механизм силы на первом и третьем интервалах
30
причем амплитуду воздействующей на низм силы на первом и третьем интер
На выходе блока 4 появляется сигнал,ниам (.;ило1 па п ip.iLJx,m .....х,,
который после элемента 17 соответствует 40 /7, определяют по расчетной формуле ускорению механизма передвижения.
С логического выхода выпрямителя 11 на разрешающие входы реле 7 и 13 поступает сигнал начала отсчета времени. Контакт 14 реле 7 размыкается, а контакт 19 реле 13 замыкается. На входе интегратора 21 появляется сигнал, что приводит к изменению сигнала на его выходе по линейному закону с интенсивностью, соответствующей ускорению а.
Через время Т/2 реле 7 отключается, реле 15 замыкает свой контакт 18 на входе
F1 ат 14-ат2 (1 -cos-) + Fc,
где mi - масса механизма передвиж ,с Ш2 - масса груза;
- F - амплитуда силы сопроти движению,
а амплитуду в оздействующей , на мех
силы на втором временном интерва
определяют по формуле
50
(mi-fm2)+/ c.
сумматора 20 и начинает отсчитывать время, сигнал на выходе интегратора 21 измeняJ ется с интенсивностью, соответствующей ускорению.
Через время выдержки реле 15 последнее отключается и формируется третий этап с ускорением аь Затем реле 13 отключается и сигнал на выходе интегратора 21 становится неизменным, соответствующим новому заданному значению скорости. В момент
вому заданниму jHa4cnn,w,,xv..pv.v,.r,. ......
отключения реле 13 происходит также запо- ,,,,riomjo Ljnnnrn няирния ГИГНЯ.ПЯ задания в
0 отключения реле 13 происходит также запо- ,,,,riomjo Ljnnnrn няирния ГИГНЯ.ПЯ задания в
15
минание нового значения сигнала задания в блоке 9.
Формула изобретения
Способ управления механизмом передвижения подвешенного на .канате груза, согласно которому осуществляют последовательно разгон, механизма передвижения на трех временных интервалах от начальной
цуч,л ,....,-г
20 до заданной конечной скорости путем воз- ттойг тот а ия ри.гтпи И пппелеляют nojiv0 до заданной конечной скорости путем воз- ттойг тот а ия ри.гтпи И пппелеляют nojivдействия на него силой и определяют полупериод собственных колебаний груза, амплитуду силы сопротивления движению и массу груза, отличающийся тем, что, с целью повы- 5 щения надежности, задают первый и третий временные интервалы равными полупериоду свободных колебаний груза, длительность второго временного интервала t определяют по формуле
. Т .
5
2а
рде vi - начальная скорость механизма; V2 - заданная конечная скорость меха низма;
25 а - заданное ускорение механизма на первом временном интервале;
7 период собственных колебаний
груза,
причем амплитуду воздействующей на механизм силы на первом и третьем интервалах
0
ниам (.;ило1 па п ip.iLJx,m .....х,,
40 /7, определяют по расчетной формуле
40 /7, определяют по расчетной формуле
F1 ат 14-ат2 (1 -cos-) + Fc,
где mi - масса механизма передвижения; ,с Ш2 - масса груза;
- F - амплитуда силы сопротивления движению,
а амплитуду в оздействующей , на механизм
силы на втором временном интервале Fz
определяют по формуле
50
(mi-fm2)+/ c.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления механизмом передвижения подвешенного на канате груза | 1989 |
|
SU1794865A1 |
| Способ успокоения колебаний подвешенного на гибкой связи грузозахватного органа механизма горизонтального передвижения подъемно-транспортного средства (его варианты) | 1981 |
|
SU965959A1 |
| Способ демпфирования колебаний подвешенного на гибкой связи грузозахватного органа механизма горизонтального передвижения подъемно-транспортного средства (его варианты) | 1979 |
|
SU1018899A1 |
| Способ управляющей электродвигателем буровой лебедки и устройство для его осуществления | 1989 |
|
SU1705994A1 |
| МАССОМЕТРИЧЕСКИЙ СПОСОБ АВТОМАТИЧЕСКОГО ОПРЕДЕЛЕНИЯ ВЕСА ГРУЗА И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2148800C1 |
| Устройство для управления амплитудой виброперемещений | 1980 |
|
SU922677A1 |
| ВОЗБУДИТЕЛЬ КОЛЕБАНИЙ | 1991 |
|
RU2025149C1 |
| Устройство для управления приводом механизма горизонтального перемещения груза на гибком подвесе | 1990 |
|
SU1803379A1 |
| Устройство для управления электроприводом горизонтального перемещения подвешенного на канате груза | 1986 |
|
SU1379238A1 |
| Устройство для управления электроприводом горизонтального перемещения груза на гибком подвесе | 1987 |
|
SU1528719A1 |
Изобретение касается подъемно-транспортных приводов, а именно способов управления механизмами передвижения подвешенных на канате грузов. Цель изобретения - повышение надежности. Способ заключается в разгоне механизма передвижения на трех временных интервалах, первый и третий из которых равны полупериоду свободных колебаний груза, а длительность второго интервала определяется в функции заданного перепада скоростей, ускорения и полупериода свободных колебаний груза. Воздействующая на механизм сила на первом и третьем интервалах определяется в функции заданного ускорения масс механизма и груза и носит косинусоидальный характер. Сила на втором интервале движения постоянна и определяется по удвоенному значению ускорения с учетом массы механизма и груза. 1 ил.
| Способ управления механизмом передвижения подвешенного на канате груза | 1981 |
|
SU1047102A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
