t6
ff
А-А
tu IS
О)
ел
QO

| название | год | авторы | номер документа |
|---|---|---|---|
| Универсальная электропечь | 1981 |
|
SU1038370A1 |
| ЭЛЕКТРОПЕЧЬ ДЛЯ ТЕРМООБРАБОТКИ | 2000 |
|
RU2181865C2 |
| Электропечь для термообработкииздЕлий | 1978 |
|
SU800560A1 |
| УСТРОЙСТВО ФИКСАЦИИ ГРУЗОВОЙ ТЕЛЕЖКИ | 1998 |
|
RU2148547C1 |
| Механизм загрузки и выгрузки поддонов камерных печей | 1980 |
|
SU922474A1 |
| Универсальная электропечь | 1976 |
|
SU588248A1 |
| Агрегат для термообработки | 1980 |
|
SU983425A1 |
| Комплекс для проведения нормализации крупного вагонного литья и закалки с последующим отпуском среднего вагонного литья | 2022 |
|
RU2795305C1 |
| КОМПЛЕКС ДЛЯ СУШКИ И ОБЖИГА КИРПИЧА С ЕГО ТРАНСПОРТИРОВКОЙ В КАССЕТАХ, КАССЕТА ДЛЯ ТРАНСПОРТИРОВКИ КИРПИЧА, АВТОМАТ-САДЧИК, АВТОМАТ-УКЛАДЧИК, СУШИЛО И НАКОПИТЕЛЬ КАССЕТ | 2006 |
|
RU2333831C2 |
| Загрузочное устройство | 1980 |
|
SU944869A1 |

Изобретение относится к термообработке изделий. Целью изобретения является повьшение надежности работы и производительности за счет автоматизации процессов загрузки-выгрузки. Линия содержит камерные электропечи, закалочные ванны, загрузочную машину, ловители и механизмы контроля заня- . тости, выполненные в местах, загрузки- выгрузки. Загрузочная машина включает приводную тележку 9, грузовой стол 10 и загрузочное устройство 11. Дпя взаимодействия с ловителями загрузочная машина оснащена выдвижным упором, а каждый ловитель содержит встречно-поворотные рычаги. По обе стороны выдвижного упора установлены датчики. Механизм контроля жесткости содержит поворотный рычаг, жестко связанный с валом, дисковый тормоз, замыкающий кулачок, датчик, дополнительный датчик и механизм контроля занятости, выполненный в виде вала с подторможенным кулачком, взаимодействующим с датчиком, связанным с приводом 16 загрузочного устройства 11, при этом вал связан с поворотным подпружиненным рычагом, взаимодейст- вугацим с садкой 15. Повьш1ение надежности работы линии достигается также за счет выполнения ловителя в виде двух встречно-поворотных подпружиненных двуплечих рычагов, взаимодействующих с выдвижным упором и датчиками, и тягового элемента в виде цепного толкателя 18, соединенного с загрузочным устройством 11. 1 з.п. ф-лы, 11 ил. (Л
//// /////////// ///// /7/.
Изобретение относится к термообработке, а именно к установкам для термообработки изделий на поддонах и без поддонов с механизацией и автоматизацией загрузочно-выгрузочных операций .
Целью изобретения является повьппе- ние надежности и производительности за счет автоматизации процессов загрузки-выгрузки.
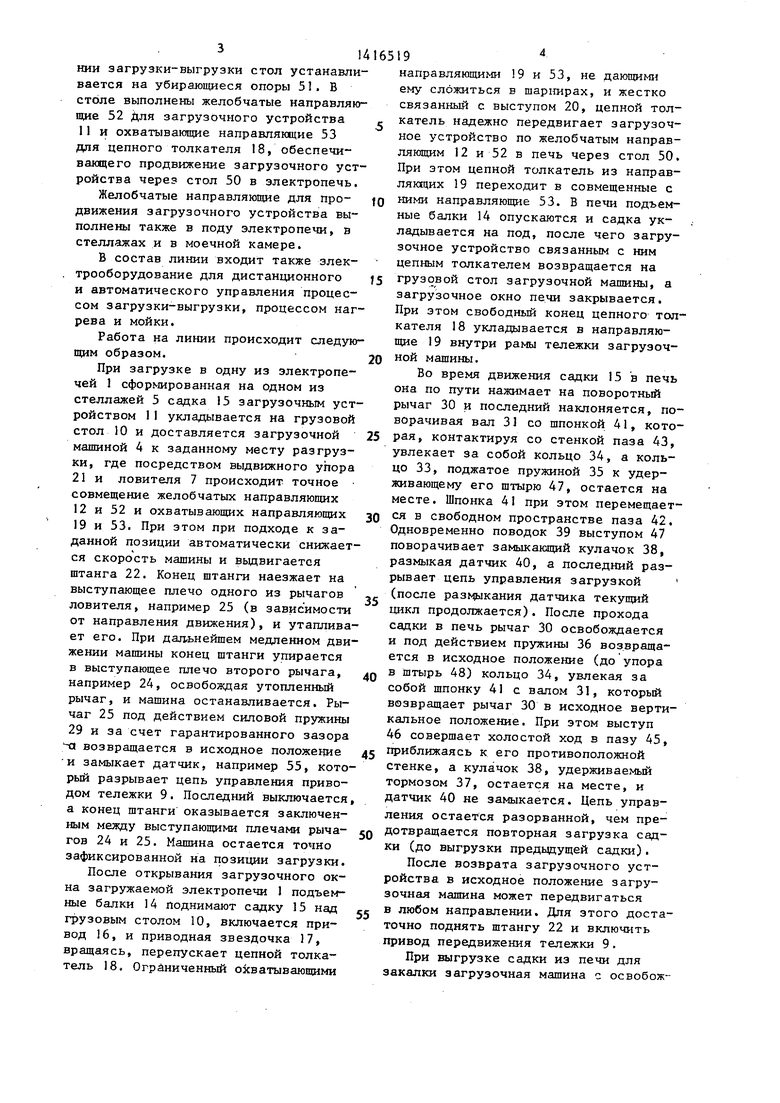
На фиг.I показана линия, общий вид, план; на фиг.2 - разрез А-А на фиг,1 с загрузочным устройством в положении Загрузка с поднятыми . подъемными бaлкa и) ; на фиг.З - разрез Б-Б на фиг.2 (с загрузочным устройством на приводной тележке с опущенными подъемными балками); на фиг.4 разрез В-В на фиг.1; на фиг.З - узел I на фиг.2; на фиг.6 - механизм контроля занятости, разрез;- на фиг. 7 - разрез Г-Г на фиг.6; на фиг,8 - разрез Д-Д на фиг.6; на фиг.9 - разрез Е-Е на фиг.6; на фиг.10 - разрез Ж-Ж на фиг.6; на фиг,11 - разрез И-И на фиг.6.
Линия содержит камерные электропечи 1 (фиг.1)5 соосно расположенные с ними закалочные ванны 2, моечную камеру 3, загрузочную машину 4 стеллажи 5. и рельсовый путь 6 для загрузочной машины, а также ловители 7 и механизм 8 контроля занятости, выполненные в местах загрузки-выгрузки.
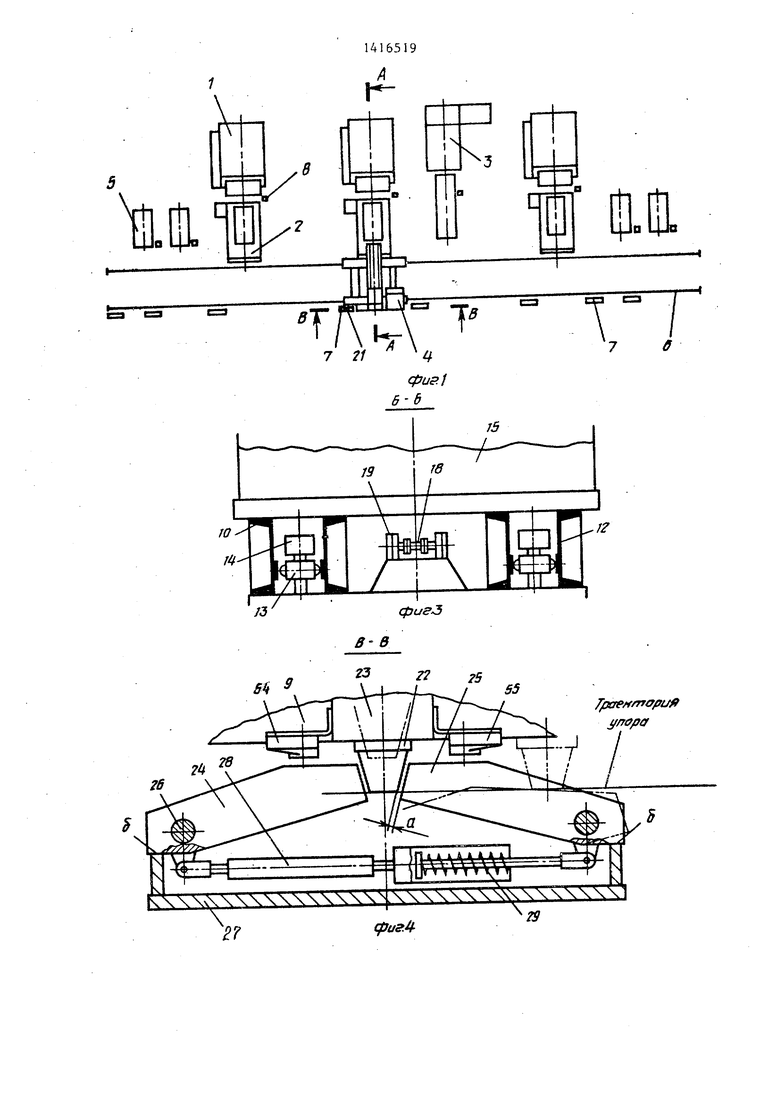
Загрузочная машина 4 включает приводную тележку 9 (фиг.2), грузовой стол 10 и загрузочное устройство 11, В грузовом столе 10 выполнены желобчатые направляющие 12. (фиг.З), а загрузочное устройство содержит опорные .балки 13, помещенные в направляющие 12, и подъемные балки 14, на которых при загрузке-выгрузке помещается садка 15, состоящая из одного или нескольких поддонов с деталями или деталей без поддонов. На.тележке 9 (фиг.2) выполнен привод 16 передвижения загрузочного устройства 11 с приводной звездочкой 17 и цепным толкателем 18 с охватывающих направляющих 19, размещенных в раме тележки 9 Один конец цепного толкателя свобод- но расположен в направляющих 19, а другой соединен с загрузочным устройством путем размещения в пазах выступа 20 (фиг.5). Для взаимодействия с ловителями 7 загрузочная машина 4 оснащена выдвижным упором 2
(фиг.1), включающим вертикально-подвижную штангу 22 (фиг.4), корпус 23, закрепленный на раме тележки 9, и
привод передвижения штанги (не показан) , а каждый ловитель содержит встречно-поворотные рычаги 24 и 25, установленные на осях 26 в корпусе 27 и связанные подпружиненной тягой
выступа в корпусе 27 для создания жесткого упора при остановке машины.
Расстояние между выступающими плечами рычагов 24 и 25 таково, что конец штанги 22 размещается между ними
с зазором а 1-2 мм, что позволяет точно зафиксировать загрузочную ма- . шину на заданной позиции загрузки- выгрузки.
По обе стороны выдвижного упора
установлены датчики 54 и 55, сигналы с которых при взаимодействии с рычагами соответственно 24 и 25 поступают в цепь управления приводом передвижения тележки для определения
положения машины и выключения привода после остановки на упоре.
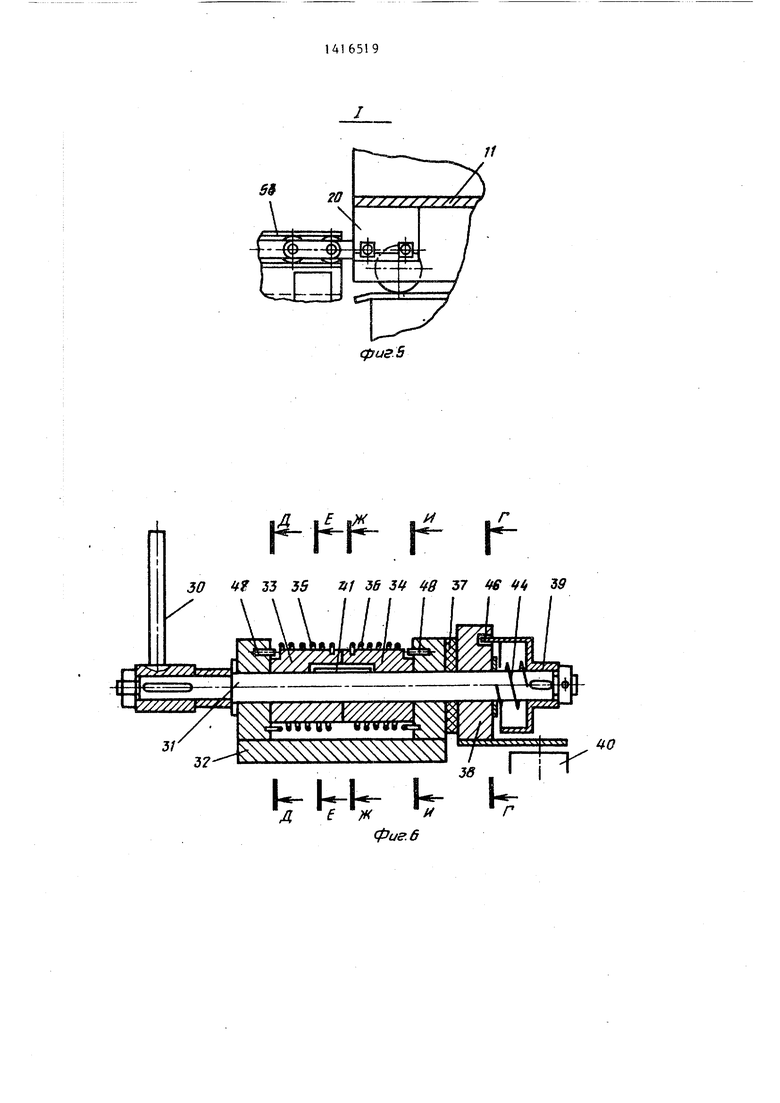
Механизм 8 контроля занятости (фиг.6) содержит поворотный рычаг 30,
жестко связанный с валом 31, установленным в подшипниковых гнездах корпуса 32, кольца 33 и 34, снабженные пружинами 35 и 36 кручения, дисковый тормоз 37, замыкающий кулачок 38,
поводок 39 и датчик 40. Бал 31 снабжен шпонкой 41, расположенной в секторных пазах 42 и 43 (фиг.8-11). Пружина 35 одним концом связана с кольцом 33, а другим - с одной из стоек
корпуса 32, а пружинй 36 связана одним концом с кольцом 34, а другим - с другой стойкой корпуса 32. По другую сторону зтой стойки на валу 31 расположен дисковый тормоз 37, к которому пружиной 44 поджат замыкающий кулачок 38, имеющий дугообразный паз
45(фиг.7), в котором помещен выступ
46поводка 39. Поворот колец 33 и 34 под действием пружин соответственно 35 и 36 ограничен штырями 47 и 48 соответственно в стойках корпуса 32.
Закалочная ванна 2 (фиг.2) включа7 ет бак 49 для закалочной среды и подъемно-опускной стол 50. В положе
14
НИИ загрузки-выгрузки стол устанавливается на убирающиеся опоры 51. В столе выполнены желобчатые направляющие 52 Для загрузочного устройства
11и охватывающие направляющие 53 для цепного толкателя 18, обеспечивающего продвижение загрузочного устройства через стол 50 в электропечьi
Желобчатые направляющие для про- движения загрузочного устройства выполнены также в поду электропечи, в стеллажах и в моечной камере.
В состав линии входит также электрооборудование для дистанционного и автоматического управления процессом загрузки-выгрузки, процессом нагрева и мойки.
Работа на линии происходит следующим образом.
При загрузке в одну из электропечей 1 сформированная на одном из стеллажей 5 садка 15 загрузочным устройством 1I укладывается на грузовой стол 10 и доставляется загрузочной мащиной 4 к заданному месту разгрузки, где посредством выдвижного упора 21 и ловителя 7 происходит точное совмещение желобчатых направляющих
12и 52 и охватывающих направляющих 19 и 53. При этом при подходе к заданной позиции автоматически снижается скорость мащины и вьщвигается штанга 22. Конец щтанги наезжает на выступающее плечо одного из рычагов ловителя, например 25 (в зависимости
от направления движения), и утапливает его. При дал-ьнейщем медленном движении мащины конец щтанги упирается в выступающее плечо второго рычага, например 24, освобождая утопленный рычаг, и мащина останавливается. Рычаг 25 под действием силовой пружины 29 и за счет гарантированного зазора -а возвращается в исходное положение и замыкает датчик, например 55, который разрывает цепь управления приводом тележки 9. Последний выключается а конец щтанги оказывается заключенным между выступающими плечами рыча- гов 24 и 25. Мащина остается точно зафиксированной на позиции загрузки. После открывания загрузочного окна загружаемой электропечи 1 подъемные балки 14 поднимают садку 15 над грузовым столом 10, включается привод 16, и приводная звездочка 17, вращаясь, перепускает цепной толкатель 18. Ограниченный охватывающими
19
направляющими 19 и 53, не дающими ему сложиться в щаргшрах, и жестко связанный с выступом 20, цепной толкатель надежно передвигает загрузочное устройство по желобчатым направляющим 12 и 52 в печь через стол 50. При этом цепной толкатель из направляющих 19 переходит в совмещенные с ними направляющие 53. В печи подъемные балки 14 опускаются и садка укладывается на под, после чего загрузочное устройство связанным с ним цепным толкателем возвращается на грузовой стол загрузочной машины, а загрузочное окно печи закрывается. При этом свободный конец цепного толкателя 18 укладывается в направляющие 19 внутри рамы тележки загрузочной мащины.
Во время движения садки 15 в печь она по пути нажимает на поворотный рычаг 30 и последний наклоняется, поворачивая вал 3 со щпонкой 41, которая, контактируя со стенкой паза 43, увлекает за собой кольцо 34, а кольцо 33, поджатое пружиной 35 к удерживающему его щтырю 47, остается на месте. Шпонка 41 при этом перемещается в свободном пространстве паза 42. Одновременно поводок 39 выступом 47 поворачивает замыкающий кулачок 38, размыкая датчик 40, а последний разрывает цепь управления загрузкой (после раз1 кания датчика текущий цикл продолжается). После прохода садки в печь рычаг 30 освобождается и под действием пружины 36 возвращается в исходное положение (до упора в Щтырь 48) кольцо 34, увлекая за собой щпонку 41 с валом 31, который возвращает рычаг 30 в исходное вертикальное положение. При этом выступ 46 соверщает холостой ход в пазу 45, приближаясь к его противоположной стенке, а кулачок 38, удерживаемый тормозом 37, остается на месте, и датчик 40 не замыкается. Цепь управления остается разорванной, чем предотвращается повторная загрузка садки (до выгрузки предыдущей садки).
После возврата загрузочного устройства в исходное положение загрузочная машина может передвигаться в любом направлении. Для этого достаточно поднять щтангу 22 и включить привод передвижения тележки 9,
При выгрузке садки из печи для закалки загрузочная машина с освобож51
денным грузовым столом устанавливается посредством упора 21 и соответствующего ловителя 7 в месте выгрузки. После открывания загрузочного окна печи загрузочное устройство передвигается в печь. В печи подъемные балки 1А переходят в верхнее положение и снимают садку 15 с пода, после чего привод 16 передвигает загрузочное устройство вместе с садкой на подъемно-опускной стол 50 ванны 2, соосной с разгружаемой печью.В момент остановки подъемнь)е балки опускаются, садка остается на столе, а загрузочное устройство движется внов в том же направлении и останавливается на грузовом столе 10. Вслед за этим опоры 51 убираются и стол вместе с садкой опускается в закалочную среду. По истечении времени закалки стол 50 вместе с садкой поднимается и устанавливается на выдвинутые опоры 51.
Во время движения садки 15 из печи она по пути нйжимает поворотный рычаг 30 и последний наклоняется, поворачивая вал 31 со шпонкой 41, которая, контактируя со стенкой паза 42, увлекает за собой кольцо 33, закручивающее пружину 35, Кольцо 34, поджатое пружиной 36 к штырю 48, в результате движения шпонки в свободном пространстве паза 43, остается на месте. Одновременно поводок 39 выступом 46 поворачивает замыкающий кулачок 38, который замыкает датчик 40. Цепь управления загрузкой восстанавливается, позволяя производить повторную загрузку.
После, прохода садки рычаг 30 освобождается и под действием пружины 35 кольцо 33 возвращается в исходное положение (до упора в штырь 47), увлекая за собой шпонку 41 с валом 31 и рычагом 30, который также становится в исходное положение. При этом выступ 46 снова совершает холостой ход, но уже Б другую сторону, приближаясь к первоначальной стенке паза 45. Заторможенный кулачок 38 остается на месте, оставляя замкнутым датчик 40.
После закалки в масло садка загружается в моечную камеру 3, а затем на свободный стеллаж 5. После закалки в воду садка сразу перегружается на свободный стеллаж.
Все загрузочно-выгрузочные операции на линии аналогичны и выполняютс
196
по командам от электросхемы управления ,
Изобретение позволяет обрабаты- вать мелкие и тонкостенные детали, исключить установку раскаленной садки на грузовой стол загрузочной машины, точно и быстро устанавливать загрузочную машину на рабочую позицию,
повысить надежность процесса загрузки-выгрузки. Это позволяет расширить технологические возможности термического производства, повысить выпуск продукции без увеличения количества
специального термического оборудования, снизить трудоемкость производст- веннЬго процесса.
Формула изобретения
1 Линия для термической обработки, содержащая камерные электропечи, закалочные ванны, загрузочную машину, имеющую возможность перемещения вдоль фронта линии с приводными тележкой и загрузочным устройством с тяговым элементом, механизм фикса- Ш1И тележки с упором и датчиками, связанными с тележкой, ловители, расположенные на позициях загрузкивыгрузки, отличающаяся тем, что, с целью повьш1ения надежности и производительности за счет автоматизации процессов загрузки- выгрузки, она снабжена дополнитель35
ным датчиком и механизмом контроля
занятости, выполненным в виде вала с подторможенным кулачком, имеющим возможность взаимодействия с дополнительным датчиком, связанным с загрузочным устройством, при зтом вал связан с подпружиненным рычагом, меющим возможность поворота, каждый овитель выполнен в виде подпружиненных рычагов, имеющих возможность поворота во встречном направлении и взаимодействия с упором и датчиками, установленными по обеим сторонам пора, а тяговый элемент выполнен в виде цепного толкателя, соединенного
с загрузочным устройством, при этом электропечь и закалочная ванна установлены попарно перпендикулярно перемещению загрузочной машины.
54 3
фиг
Tpae/fmoffuft j//70pa
(ригЛ
59
1
-Е
С
-
rt
Д а i /
rhr h h
f 35 55 / J Stf 8 37 4tf 4 3
J/
/Х/ХХХУХХ УУ/
5гЕ
фиг. 5
gsa 7
Л- Д
Е- Е
31 1 2 5
фиг. 8
фиг. 9
иг.7
Ж
ff-H
3
Фиг. ТО
Фиг //
| УСТРОЙСТВО для ЗАГРУЗКИ, ПЕРЕМЕЩЕНИЯ И ВЫГРУЗКИ ПОДДОНОВ в АГРЕГАТЕ ДЛЯ ТЕРМООБРАБОТКИ ИЗДЕЛИЙ | 0 |
|
SU307112A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Термический агрегат | 1982 |
|
SU1041588A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| I | |||
