00
о
Изобретение относится к области программируемых устройств для вычерчивания циклоидных крИБых, используемых при разметке.
Целью изобретения является повышение удобства пользования.
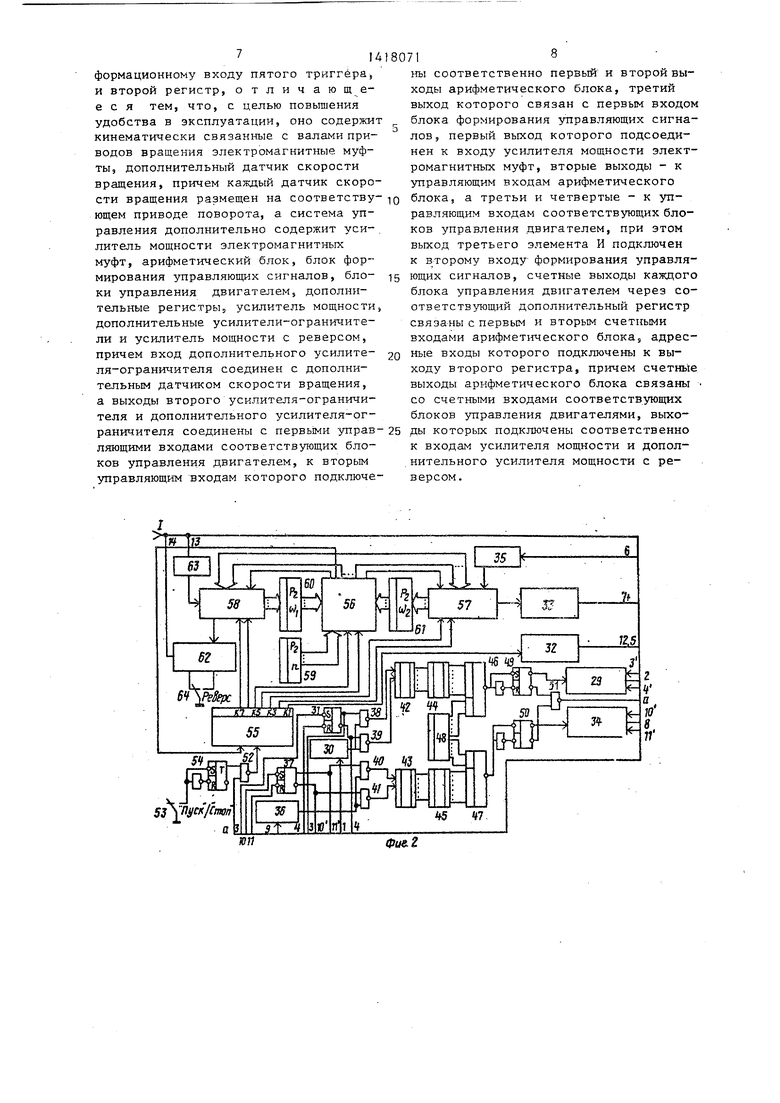
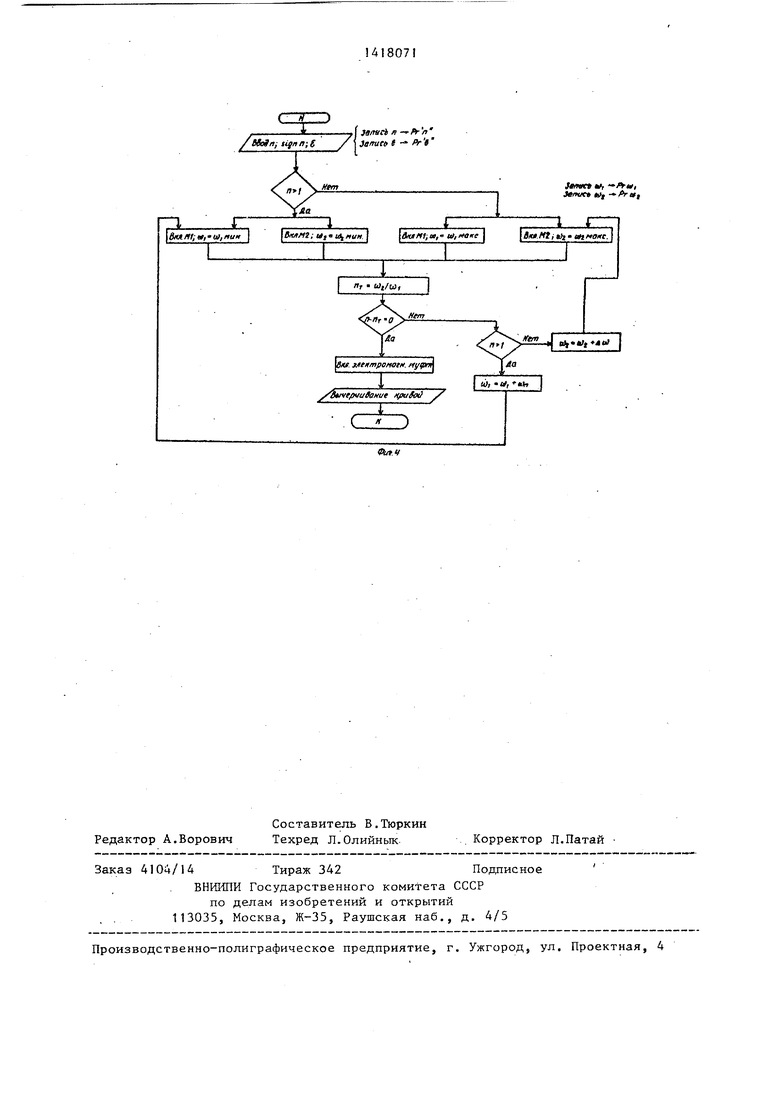
На фиг.1 показана кинематическая схема механической части; на фиг.2 - блок-схема систе -Пз1 управления;. на фиг. 3 таблица кодов п нафиг. 4-- апгоритм работы манипулятора.
Устройство для вычерчивания циклических кривых содержит стаканы и 2, в которьш на подшипниках 3 и 4 уста- новлень валы 5 и 6 с токосъемниками 7 и 8j валы 5 и 6 связаны с приводами 9 и 10 поворота через электромагнитные муфты 11 и 2, здесь же установлены датчики 3 и 14 скорости вращения, валы 5 и 6 также связаны и с корпусами 15 и 16, в последних С возможностью их перемещения в продольном направлении проходят штанги 17 и 18, приводимые в движение приводами 19 и
20перемещенияг при этом привод 19 первого звена установлен на основании
21вместе со стаканом 1 . На конце штанги 17 первого звена установлен стакан 2 с приводом 1Q поворота, на конце штанги 18 второго звана установлен пишущий узел 22, На корпусах 15 и 16 установлены приводы 19 и 20 перемеще-1 НИН соответственно, здесь же крепятся датчики 23 перемещения на корпусе
15и датчик 24 перемещения на корпусе
16и концевые выключатели 25, 26 и 27,, 28. Привод 19 и датчик 23 перемещения, концевые выключатели 25 и 26
и электромагнитная муфта 1 через токосъемник 7, а приводы 10 и 20, датчик 4 скорости вращения, электромагнитная муфта 12, датчик 24 перемещения и концевые выключатели 27 и 28 через токосъемник В соединяются соответственно с выходом усилит еля мощности с реверсом 29, с входом усилителя-ограничителя 30, с входами R и S первого триггера 31, с выходом усилителя 32 мощности электромагнитных муфт, с выходами усилителя 33 мощное- ти и усилителя мощности с реверсом 34., с входом усилителя ограничителя 35s выходом усилителя 32 электромагнитных муфт, с входом уси- ,пргчителя ограничителя 36 и. со входами iR и S Ёторого триггера 37. Выходы триггеров 31 и 37 соединяются с од- .Hima из двух входов схем типа 2И 38,
180712
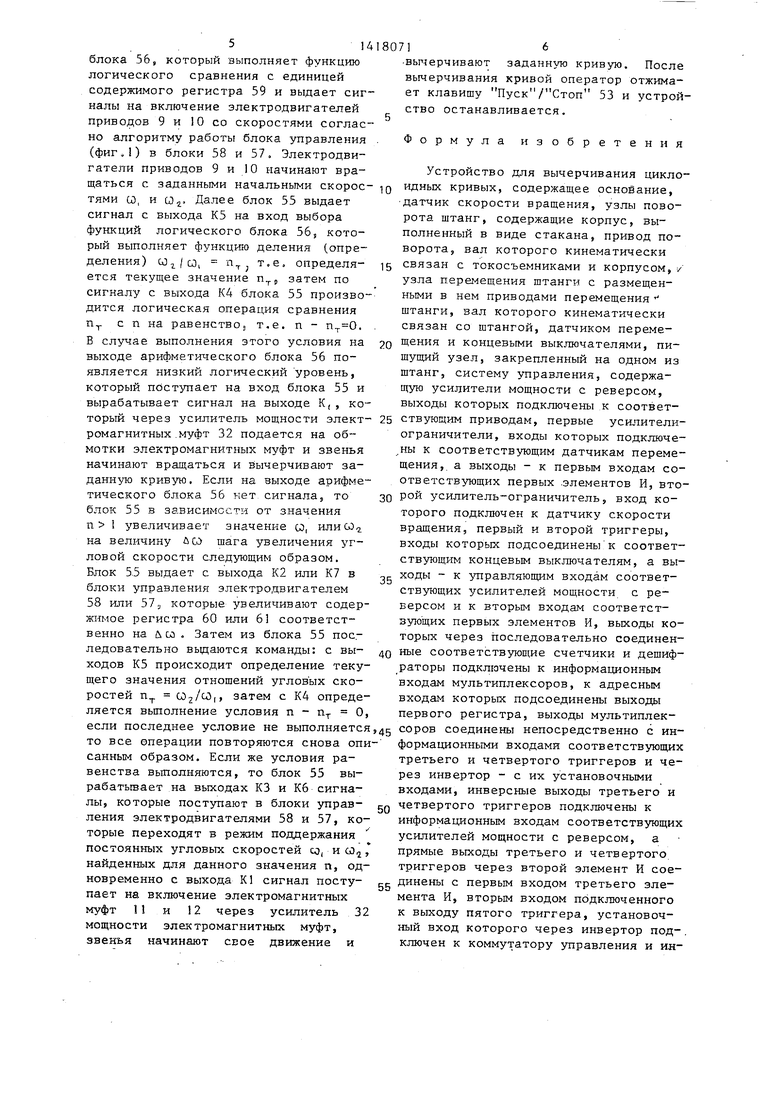
39 и 40, 41, а :гакже входами реверса усилителей мощности с реверсом 29 и 34 соответственно. ВыхЬды усилителей- ограничителей 30 и 36 соединяются с вторыми входами схем типа 2И 38, 39 и 40j, 41, Выходы схем типа 2И 38, 39 и 40s .соединены со счетными входами счетчиков 42 и 43, выходы коIQ торых соединень с входами дешифраторов 44 и 45. Выходы дешифраторов 44 и 45 соединены с информационными входами мультиплексоров 46 и 47, а их адресные входы соединяются с регист15 ром 6 48. Выходы мультиплексоров 46 и 47 поступают на входы триггеров 49 и 50, прямые выходы которых соединены со схемой типа 2И 51, а инверсные - с входами усилителей мощности с ре20 версом 39 и 34. Выход схемы типа 2И 51 поступает на один из входов схемы типа 2И 52, другой вход которой соединен с клавишей 53 через триггер 54. Выход схемы типа И 52 со25 единяется с блоком 55 формирования управляющих сигналов, который представляет собой классическую схему автомата управленияS который реализует алгоритм работы блока, управления про30 граммного манипулятора и содержащего генератор тактовых импульсов, счетный дешифратор и схему синхронизации. Один из входов синхронизации вычислителя 55 соединяется с выходом схемы типа И 52, а другой его вход соединяется с выходом арифметического блока 56. Блок 55 имеет семь выходов дешифраторов, которые соединяются следующим образом: К1 - с входом усили Q теля 32 мощности электромагнитных
муфт, выходы К2, КЗ и Кб, К7 - с входами блоков управления электродвигателями 57 и 58 соответственно; выходы К4, К5 - с входами арифметического блока 56. Логический блок 56 представляет собой микросхему (например, К 155 ИП 3 или другой серии), которая информационными входами соединена,с выходами регистра 59 и регистров 60 и 61, а его информационные выходы соединяются с параллельными входами блока управления электродвигателями 57 и 58, которые содержат счетчики текущего значения, угловых скоростей (О, и «2 S комбинационную часть и схемы стабилизации скорости вращения электродвигателями. Выходы блоков управления электродвигателями 57 и 58 соединены с входами регистров 60 и - .
35
45
50
55
314
61 соответственно, а их выходы схем стабилизации скорости вращения (не показаны) соединены с входами усили теля мощности с реверсом 62 и усилителя 33 мощности. Счетные входы счетчиков блока управления электродвигателями 57 и 58 соединены с усилителями-ограничителями 63 и 35. Выход усилителя мощности с реверсом 62 соединен с приводом 9, а его входы реверса соединены с тумблером 64.
Уравнение движения манипулятора может быть задано в параметрической форме вида:
X cosq, +. COS (п+ )ср,1
у sinq) + sin(n+ )ц), г
где X х/1, ; у y/l, ;
1( , IT, длины звеньев; СО, , cOj угловые скорости звень
- ев; Y./l- отнощение длин плеч
звеньев;
h cOг/O| -отношение угловых скоростей звеньев.
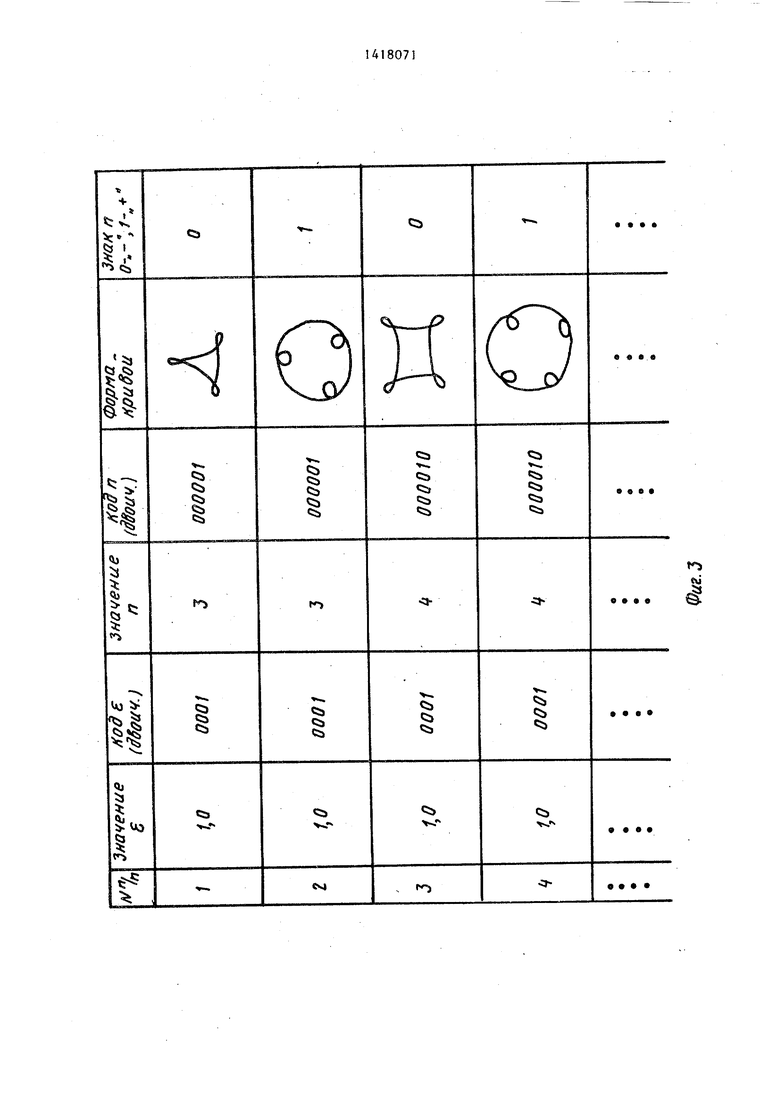
Для п const и Е const, т.е. их фиксированных значений, изменяя эти значения в фиксированном диапазоне, можно получить семейство стационарных кривых, имеющих при гипоциклоиды, а при п О эпициклоиды. Данное семейство кривых можно закодировать, определенным образом, в зависимости от их конфигурации, т.е. значений п и . В качестве примера приводится таблица кодов п и .
Устройство для вычерчивания циклических кривых работает следующим образом.
Оператор набирает коды п и , которые заносятся в соответствзпощие ре ,. гистры п и 59 и 48. После появлени кода в регистре 6 сразу начинают работать п мультиплексор з1 46 и 47 j которые выбирают канал и подключают Л его к своему выходу. Так как первоначально на выходах дешифраторов 44 и 45 выставлены низкие логические уровни, кроме нулевых выходов, то на выходах мультиплексоров 46 и 47 устанавливаются высокие логические уровни, которые по входу S триггеров 49 и 50 устанавливают на их инверсных выходах высокие логические уровни, являющиеся разрещением для усилителей мощности с реверсов 29 и 34, т.е на их выходах появляются напряжения, которые через токосъемники 7 и 8
водятся к приводам 19 .и 20$ и электродвигатели начинают вращаться и приводят в движение штанги 17 и 18. Зубцы штанг 17 и 18 проходят возле дат
чиков 23 и 24 перемещения и в них наводятся ЭДС, которые через токосъемники 7 и 8 пост -пают на входы усилителей-ограничителей 30 и 36, где они
преобразуются в прямоугольные импульсы положительной полярности, которые поступают на входы микросхемы типа И 38 - 41. Уровни разрешения прохождения импульсов на выходе этих микросхем типа И 38 - 4 поступают с выходов R и S-триггеров 31 и 37, которые устанавливаются по входам R и S в зависимоетк от состояния контактов концевых выключателей 25-28, которые
в свою очередь замыкаются в зависимости от положения штанг 17 и 18. . Первоначально замыкаются контакты 25 и 26, т.е. штанги 17 и 18 полностью выдвинуты и поэтому низким логичесК1-ш уровнем через токосъемники 7 и 8 устанавливают триггеры 37 и 31 в единичное состояниеS т.е. высокий логический уровень появляется на входах микросхем типа И 38 и 40, что вызьшает появление на их выходах импульсов, которые постт,Т1ают на.прямые счетные входы счетчиков 42 и 43, где они суммируются в виде переменных кодов. Эти имеющиеся коды пост -шают на входы дешифраторов 44 и 45 и производят последовательный перебор его выходов. При совпадении кодов на выходах счетчиков 42 и 43 с кодами на адресных входах мультиплексоров 46 и 47 на
входах последних появляются низкие логические уровни, которые изменяют состояние триггеров 49 и 50, блокируют усилители мощности с реверсом 29 и 34 и электродвигатели приводов 19
и 20 останавливаются. Прямые выходы триггеров 49 и 50 через микросхему типа И 51 дают разрешение для прохождения сигнала Пуск с клавиши 53 че-i чез триггер 54 и в виде высокого
логического уровня с выхода микросхемы типа И 52, который поступает на вход блока 55, реализующего алгоритм работы манипулятором, как сигнал разрешения работы управляющего автомата
по п. После прихода этого сигнала
блок 55 формирования управляющих сигналов с выхода К4 выдает сигнал на вход выбора функции арифметического
514
блока 56s который выполняет функцию логического сравнения с единицей содержимого регистра 59 и выдает сигналы на включение электродвигателей приводов 9 и 10 со скоростями согласно алгоритму работы блока управления (фиг.1) в блоки 58 и 57, Электродвигатели приводов 9 и 10 начинают вращаться с заданными начальными скоростями со, и Q,. Далее блок 55 выдает сигнал с выхода К5 на вход выбора функций логического блока 56, который выполняет функцию деления (определения) , п т.е. определяется текущее значение затем по сигналу с выхода К4 блока 55 производится логическая операция сравнения п с п на равенство, т.е. п - , В случае выполнения этого условия на выходе арифметического блока 56 появляется низкий логический уровень, который поступает на вход блока 55 и вырабатывает сигнал на выходе К,, который через усилитель мощности электромагнитных .муфт 32 подается на обмотки электромагнитных муфт и звенья начинают вращаться и вычерчивают заданную кривую. Если на выходе арифметического блока 56 нет сигнала, то блок 55 в зависимости от значения п увеличивает значение о, илисо на величину и о шага увеличения угловой скорости следующим образом. Блок 5.5 выдает с выхода К2 или К7 в блоки управления электродвигателем 58 или 57 которые увеличивают содержимое регистра 60 или 61 соответственно на л со , Затем из блока 55 последовательно вьщаются команды: с выходов К5 происходит определение текущего значения отношений угловых скоростей п с02/ 1 затем с К4 определяется вьшолнение условия п - п,- О если последнее условие не выполняется то все операции повторяются снова опи санным образом. Если же условия равенства вьшолняются, то блок 55 вырабатывает на выходах КЗ и Кб сигналы, которые поступают в блоки управления электродвигателями 58 и 57, которые переходят в режим поддержания постоянных угловых скоростей со, иоз найденных для данного значения п, одновременно с выхода К1 сигнал поступает на включение электромагнитных муфт 1 и 12 через усилитель 3 мощности электромагнитных муфт, звенья начинают свое движение и
16
вьмерчивают заданную кривую. После вычерчивания кривой оператор отжимает клавищу 53 и устройство останавливается.
Формула изобретения
Устройство для вычерчивания циклоидных кривых, содержащее основание, датчик скорости вращения, узлы поворота штанг, содержащие корпус, выполненный в виде стакана, привод поворота, вал которого кинематически
связан с токосъемниками и корпусом, / узла перемещения щтанги с размещенными в нем приводами перемещения штанги, вал которого кинематически связан со штангой, датчиком перемещения и концевыми выключателями, пи- щущий узел, закрепленный на одном из штанг, систему управления, содержащую усилители мощности с реверсом, выходы которых подключены к соответствующим приводам, первые усилители- ограничители, входы которых подключе- .ны к соответствующим датчикам перемещения, а выходы - к первым входам соответствующих первых .элементов И, второй усилитель-ограничитель, вход которого подключен к датчику скорости вращения, первый и второй триггеры, входы которых подсоединены к соответствующим концевым выключателям, а вы35
ходы - к управляющим входам соответствующих усилителей мощности, с реверсом и к вторым входам соответствующих первых элементов И, выходы которых через последовательно соединен0 ные соответствующие счетчики и дещиф- раторы подключены к информационным входам мультиплексоров, к адресным входам которых подсоединены выходы первого регистра, выходы мультиплек- 5 соров соединены непосредственно с информационными входами соответствующих третьего и четвертого триггеров и через инвертор - с их установочными входами, инверсные выходы третьего и
Q четвертого триггеров подключены к
информационным входам соответствующих усилителей мощности с реверсом, а прямые вькоды третьего и четвертого, триггеров через второй элемент И соединены с первым входом третьего элемента И, вторым входом подключенного к выходу пятого триггера, установочный вход которого через инвертор под-, ключен к коммутатору управления и ин55
714
формационному входу пятого триггера и второй регистр, отличаю щ е- е с я тем, что, с целью повышения удобства в эксплуатации, оно содержит кинематически связанные с валами приводов вращения электромагнитные муфты, дополнительный датчик скорости вращения, причем каждый датчик скорости вращения размещен на соответствующем приводе поворота, а система управления дополнительно содержит усилитель мощности электромагнитных муфт, арифметический блок, блок формирования управляющих сигналов, блоки управления двигателем, дополнительные регистры, усилитель мощности, дополнительные усилители-ограничители и усилитель мощности с реверсом, причем вход дополнительного усилителя-ограничителя соединен с дополнительным датчиком скорости вращения, а выходы второго усилителя-ограничителя и дополнительного усилителя-ограничителя соединены с первыми -управляющими входами соответствующих блоков управления двигателем, к вторым управляющим входам которого подключе1
ны соответственно первый и второй выходы арифметического блока, третий выход которого связан с первым входом блока формирования управляющих сигналов, первый выход которого подсоединен к входу усилителя мощности электромагнитных муфт, вторые выходы - к управляющим входам арифметического
блока, а третьи и четвертые - к управляющим входам соответствующих бло ков управления двигателем, при этом выход третьего элемента И подключен к второму входу формирования управляющих сигналов, счетные выходы каждого блока управления двигателем через соответствующий дополнительный регистр связаны с первым и вторым счетными входами арифметического блока, адреснь е входы которого подключены к выходу второго регистра, причем счетнь ш выходы арифметического блока связаны со счетными входами соответствующих блоков управления двигателями, вьгхо.ды которых подключены соответственно к входам усилителя мощности и дополнительного усилителя мощности с реверсом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для вычерчивания циклоидных кривых | 1983 |
|
SU1108022A1 |
| Устройство для перемещения магнитной ленты | 1990 |
|
SU1697113A1 |
| Устройство для перемещения магнитной ленты | 1990 |
|
SU1705865A1 |
| МАНИПУЛЯТОР ДЛЯ ОЧИСТКИ ВАГОНОВ С ДВУХСКАТНЫМ ПОЛОМ | 1989 |
|
RU2026215C1 |
| Рулевое управление колесного транспортного средства | 1990 |
|
SU1736802A1 |
| УСТАНОВКА ДЛЯ ГАЛЬВАНОХИМИЧЕСКОЙ ОБРАБОТКИ | 1991 |
|
RU2023766C1 |
| Система управления агрегатом правки цилиндрических изделий | 1981 |
|
SU1074621A1 |
| Функциональный аналого-цифровой преобразователь | 1983 |
|
SU1113813A1 |
| Токарно-винторезный станок | 1987 |
|
SU1526954A1 |
| Устройство для управления пневмомеханической прядильной машиной | 1985 |
|
SU1294885A1 |
Изобретение относится к устройствам для вычерчивания циклоидных кривых, может быть использовано при разметке детален и позволяет повысить удобства пользования. Устройство содержит узлы поворота штанг, состоящие из привода поворота, токосъемников, электромагнитных муфт, датчиков скорости вращения, узлы перемещения штанг, включающие привод перемещения, датчики перемещения, концевые выключатели я пишущий узел, а электронная часть устройства содержит, усилители-ограничители, усилители мощности, блоки управления двигателем вращения, регистры, блок реализации алгоритма, логический блок, элементы И, счетчики, дешифраторы и мультиплексор. 4 ил. Ф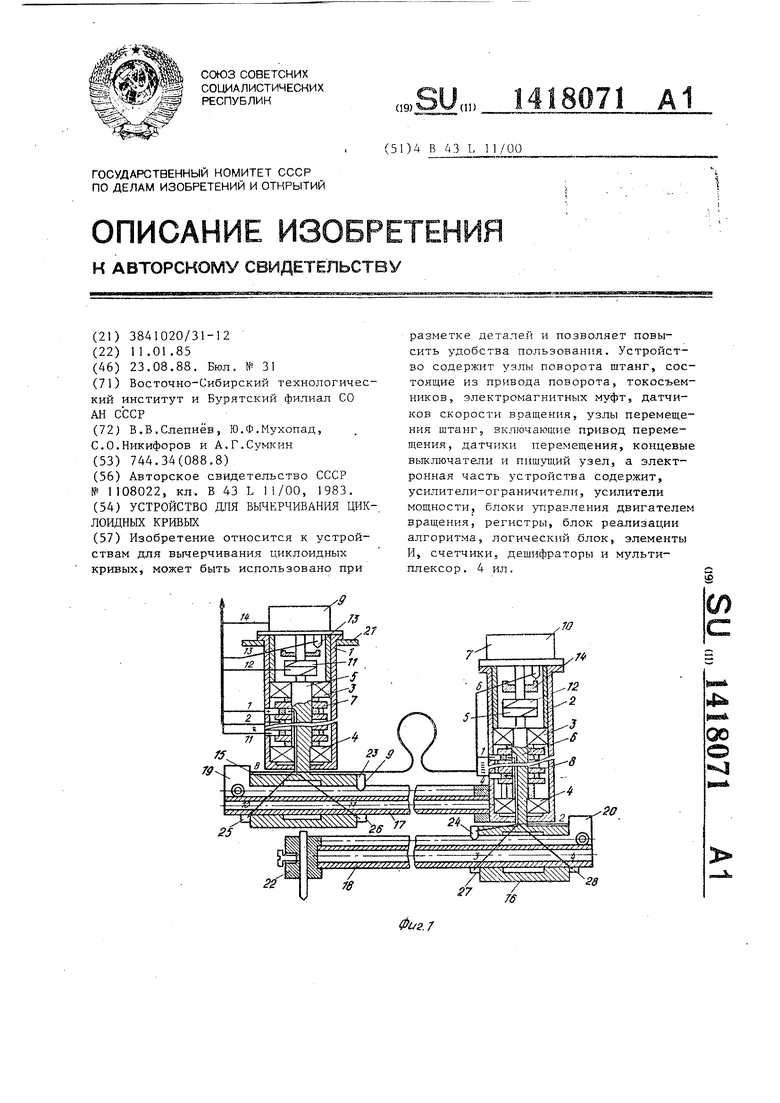
ЮЛ
Фие.2
§
4
i
f
I
f
r
I
5S «5s
«Ss
evi
e « a e
«5
«sa
с:э
55
о « о
ф
«ъ
СЪ v,
9
О
(
je/wrt - ff n
/ttoiitj tijn n; f / Jafuc t - Pr l
| Устройство для вычерчивания циклоидных кривых | 1983 |
|
SU1108022A1 |
| Зубчатое колесо со сменным зубчатым ободом | 1922 |
|
SU43A1 |
