фие.г
Изобретение относится к подъемно- транспортному оборудованию, а именно к устройствам для управления электроприводами горизонтального перемещения грузов на гибких подвесах.
Цель изобретения - повьппение точности.
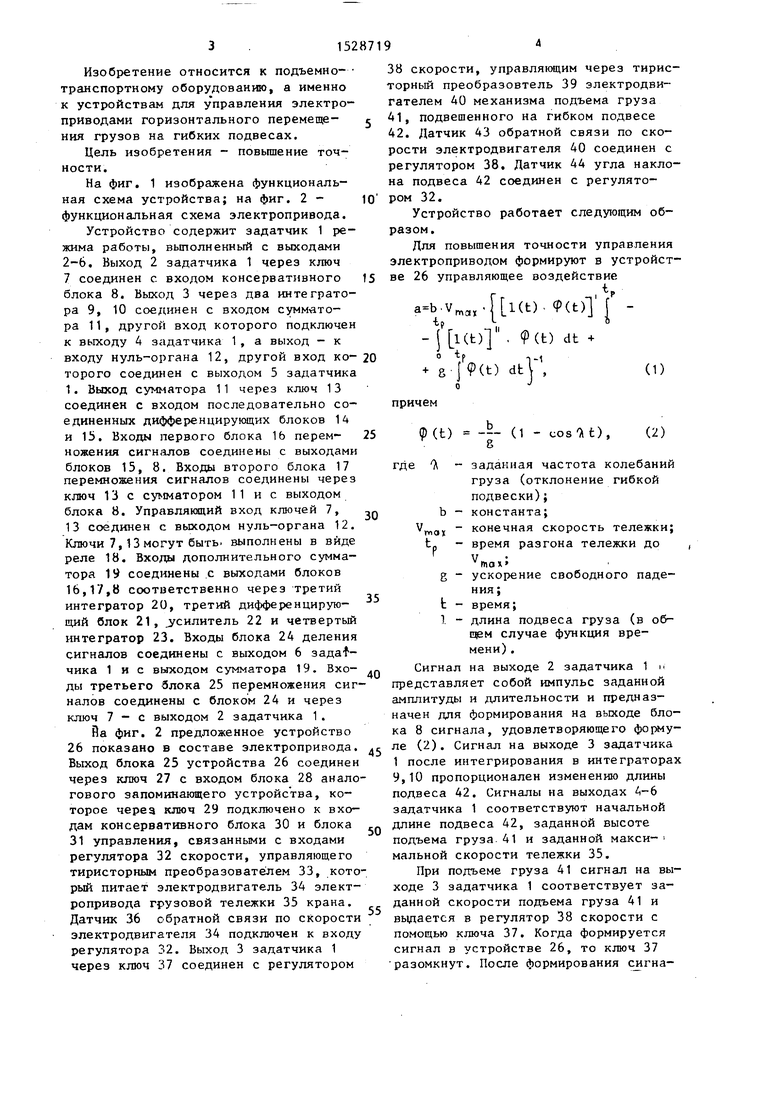
На фиг. 1 изображена функциональная схема устройства; на фиг. 2 - функциональная схема электропривода.
Устройство содержит задатчик 1 режима работы, выполненный с выходами 2-6. Выход 2 задатчика 1 через ключ 7 соединен с входом консервативного блока 8. Выход 3 через два интегратора 9, 10 соединен с входом сумматора 11, другой вход которого подключен к выходу 4 задатчика 1 , а выход - к входу нуль-органа 12, другой вход которого соединен с выходом 5 задатчика 1. Выход сумматора 11 через ключ 13 соединен с входом последовательно соединенных дифференцирующих блоков 1- и 15. Входы перв,ого блока 16 перемножения еигн;1лов соединены с выходами
блоков 15, 8. Входы второго блока 17 перемножения сигналов соединены через
ключ 13 с сумматором 11 и с выходом блока 8. Управляющий вход ключей 7, 13 соединен с выходом нуль-органа 12. Ключи 7, 13 могут быть, выполнены в виде реле 18. Входы дополнительного сумматора 19 соединены с выходами блоков 16,17,8 соответственно через третий интегратор 20, третий дифференцирующий блок 21, усилитель 22 и четвертый интегратор 23. Входы блока 24 деления сигналов соединены с выходом 6 задатчика 1 и с выходом сумматора 19. Входы третьего блока 25 перемножения сигналов соединены с блоком 24 и через ключ 7 - с выходом 2 задатчика 1.
Йа фиг. 2 предложенное устройство 26 показано в составе электропривода. Выход блока 25 устройства 26 соединен через ключ 27 с входом блока 28 аналогового запоминающего устройства, которое через ключ 29 подключено к входам консервативного блока 30 и блока 31 управления, связанными с входами регулятора 32 скорости, управляющего тиристорным преобразователем 33, который питает электродвигатель 34 электропривода грузовой тележки 35 крана. Датчик 36 обратной связи по скорости электродвигателя 34 подключен к входу регулятора 32. Выход 3 задатчика 1 через ключ 37 соединен с регулятором
5
38 скорости, управляющим через тирис- торный преобразовтель 39 электродвигателем 40 механизма подъема груза
41,подвешенного на гибком подвесе
42.Датчик 43 обратной связи по скорости электродвигателя 40 соединен с регулятором 38. Датчик 44 угла наклона подвеса 42 соединен с регулятором 32.
Устройство работает следующим образом.
Для повышения точности управления электроприводом формируют в устройстве 26 управляющее воздействие
-.,- .V, ip
0
ma
1(ь),Ф(е)
- I Ut) , Ф(Ь) dt -ь
(t) dhV
n(1)
причем
lp(t) --- (1 - cos At), (2) S
где - заданная частота колебаний груза (отклонение гибкой подвески); b - константа;
5
0
5
0
5
то Р
конечная скорость тележки; время разгона тележки до
V,
max
g - ускорение свободного падения;
t - время;
I - длина подвеса груза (в об- цем случае функция времени) .
Сигнал на выходе 2 задатчика 1 и представляет собой импульс заданной амплитуды и длительности и предназначен для формирования на выходе блока 8 сигнала, удовлетворяющего формуле (2). Сигнал на выходе 3 задатчика 1 после интегрирования в интеграторах 9,10 пропорционален изменению длины подвеса 42. Сигналы на выходах А-6 задатчика 1 соответствуют начальной длине подвеса 42, заданной высоте подъема груза 41 и заданной макси- мальной скорости тележки 35,
При подъеме груза 41 сигнал на выходе 3 задатчика 1 соответствует заданной скорости подъема груза 41 и выдается в регулятор 38 скорости с помощью ключа 37. Когда формируется сигнал в устройстве 26, то ключ 37 разомкнут. После формирования сигна 15
ла в устройстве 26 ключ 27 кратковременно замыкается и блок 28 запоминает сигнал. Выходной сигнал с блока 28 не проходит в режиме запоминания, так как разомкнут ключ 29. Затем размыкается ключ 27 и замыкается ключ 37. Начинается подъем груза 41 и в заданный момент времени ключ 29 замыкается, при этом начинается пере- мещение тележки 35 с заданным графиком ускорения, причем по истечении заданного интервала времени тележка 35 достигает максимальной скорости. После достижения заданной длины под- веса 42 электродвигатель 40 отключается, а тележка 35 продолжает движение .
Формула изобретения
Устройство для управления электроприводом горизонтального перемещения груза на гибком подвесе, содержащее задатчик режима работы, один выход которого связан с входом консерва- тивного блока, блоки перемножения сигналов, дифференцирующие блоки, два из которых соединены последовательно и подключены к одному входу одного блока перемножения сигналов, и сумма- тор, отличающееся тем, что, с целью повышения точности, оно снабжено интеграторами, два из котог рых включены последовательно и соеди96
йены входом с вторым выходом задатчи- ка режима работы, а выходом - с одним входом сумматора, другой вход которого подключен к третьему выходу задат- чика режима работы, нуль-органом, входы которого соединены с выходом сумматора и четвертым выходом задат- чика режима работы, ключами, посредством которых выход сумматора соединен с входом первого дифференцирующего блока и одним входом второго блока перемножения сигналов, первый выход задатчика режима работы - с входом консервативного блока и с одним входом третьего блока перемножения сигналов,а управляюрхий вход ключей соединен с выходом нуль-органа, дополнительным сумматором, входы которого соединены с выходами первых двух блоков перемножения сигналов и консервативного блока соответственно через третий интегратор, третий дифференцирующий блок и четвертый интегратор, и блоком деления сигналов, входы которого соединены с пятьм выходом за- датчика режима работы и выходом дополнительного сумматора, а выход - с другим входом третьего блока перемножения сигналов, выход которого связан с управляющим входом электропривода, при этом другие входы первых двух блоков перемножения сигналов соединены с выходом консервативного блока.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления электроприводом горизонтального перемещения подвешенного на канате груза | 1986 |
|
SU1379238A1 |
| Устройство для управления электроприводом крановой тележки с грузом на гибком подвесе | 1987 |
|
SU1572986A1 |
| Устройство для управления электроприводом горизонтального перемещения подвешенного на гибком подвесе груза | 1989 |
|
SU1645237A2 |
| Устройство для управления электропроводом механизма горизонтального перемещения груза | 1985 |
|
SU1342866A1 |
| Устройство для управления приводом передвижения тележки с гибким подвесом груза | 1989 |
|
SU1684239A1 |
| Устройство для управления электроприводом механизма горизонтального перемещения подвешенного на канате груза | 1988 |
|
SU1527134A1 |
| Устройство для управления приводом перемещения тележки с гибким подвесом грузозахватного органа | 1988 |
|
SU1558851A1 |
| Устройство для управления электродвигателем механизма перемещения груза на гибком подвесе | 1990 |
|
SU1799843A1 |
| Устройство для управления приводом передвижения крановой тележки с гибкой подвеской груза | 1991 |
|
SU1799844A1 |
| Задатчик скорости механизма горизонтального перемещения груза на гибком подвесе | 1988 |
|
SU1646981A1 |
Изобретение относится к подъемно-транспортному оборудованию, а именно к устройствам для управления горизонтальным перемещением грузов на гибких подвесах. Цель изобретения - повышение точности. Электродвигатель 34 грузовой тележки 35 подключен к тиристорному преобразователю 33, который управляется через регулятор 32 скорости от устройства 26, формирующего управляющее воздействие. Для разгона тележки 35 формируют управляющее воздействие на электродвигатель 34 с помощью устройства 26, при этом тележка 35 имеет переменное ускорение до достижения максимальной скорости. 2 ил.
Редактор М. Келемеш
Составитель А. Гедеонов
Техред М.Дидык Корректор Э. Лончакова
Заказ 7606/.19
Тираж 628
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-издательский комбинат Патент, г. Ужгород, ул. Гагарина, 101
Подписное
| Устройство для управления электроприводом горизонтального перемещения подвешенного на канате груза | 1986 |
|
SU1379238A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
