Изобретение относится к подъемно- транспортному оборудованию, а именно к устройствам для управления электроприводами механизмов горизонтального перемещения грузов.
Цель изобретения - повьшение надежности.
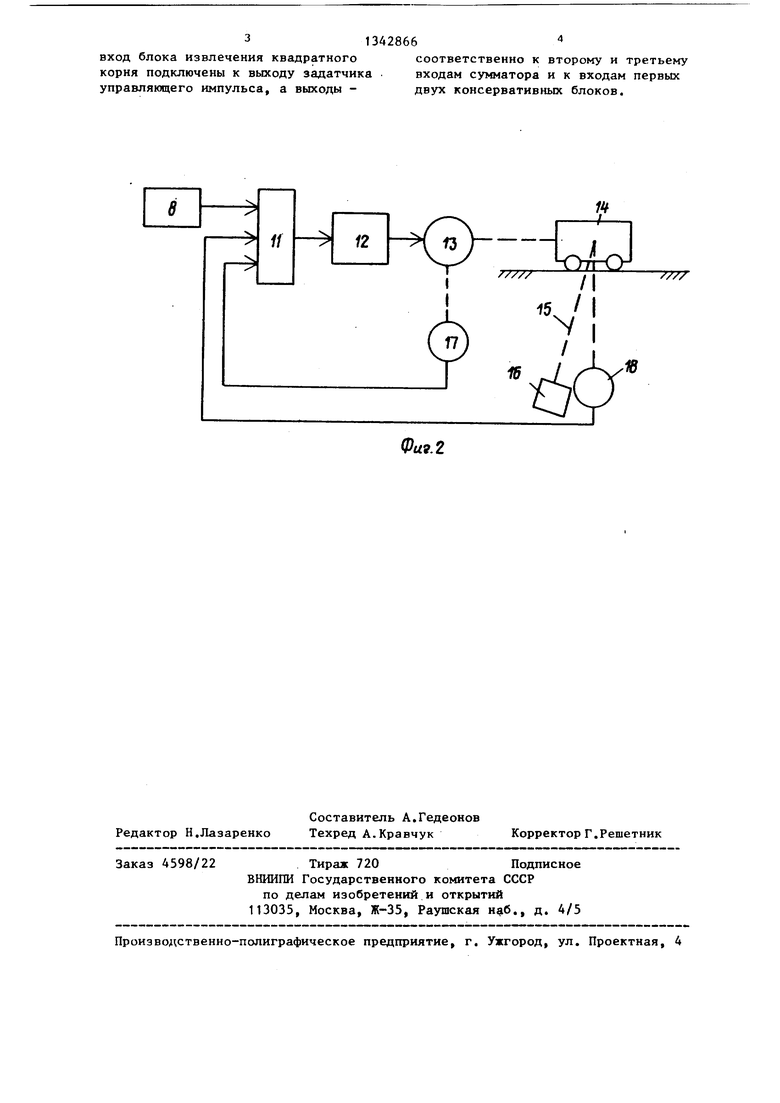
На фиг. 1 изображена функциональная схема устройства; на фиг. 2 - функциональная схема электройривода механизма.
Устройство для управления электроприводом механизма горизонтального перемещения груза содержит задатчик управляющего импульса, выход 1 которого через блок 2 вычисления квадратного корня подключен к входам консервативных блоков 3 и 4. Выход блока 3 подключен к одному входу блока 5 перемножения сигналов. Выход блока 4 подключен через усилитель 6 и блок 7 дифференцирования сигнала к другому входу блока 5. Выход блока 5 соединен с одним входом сумматора 8. Входы консервативных блоков 9 и 10 подсоединены к выходу 1 задат- чика, а выходы - к второму и третьему входам сумматора 8. Выход сумматора 8 подключен к управляющему входу электропривода, включащего в себя регулятор 11 скорости, управляющий тиристорным преобразователем 12 электродвигателя 13 механизма перемещения, например грузовой тележки 14, связанной гибкой связью 15 с грузом 16. Датчик 17 скорости электродвигателя 13 и датчик 18 угла отклонения гибкой связи 15 подключены к входам регулятора 11 скорости.
Устройство для управления электроприводом механизма горизонтального перемещения груза работает следующим образом,
Устройство предназначено для регу- g ход которого связан с управляющим лирования скорости тележки 14 на эта- входом электропривода, отличающееся тем, что, с целью повышения надехсности, оно снабжено консервативными блоками, входы первых
gQ двух из которых подключены к выходу блока извлечения квадратного корня, а выход первого - к одному входу блока перемножения сигналов, блоком дифференцирования сигнала, вход кото55 подсоединен к выходу второго консервативного блока, а выход - к второму входу блока перемножения сигналов, при этом входы третьего и четвертого консервативных блоков и
пе ее разгона или торможения с целью гащения колебания груза 16 и плавного нагружения механической части электропривода.
Устройство обеспечивает движение тележки 14 со скоростью
iI I /
V а
Г 1 / 31 J I Я Ue3
.(,-. .(,-,
Ug
cos
) --(1lii),
4g /
COS
2
(0
где
ускорение тележки,
круговая частота;
время,
длина гибкой связи;
ускорение свободного падения. Угол отклонения гибкой связи 15 от вертикального положения при разгоне (торможении) тележки 14 равен
(1-COS
t ).sin 4(2)
Сигнал задания по скорости для тележки 14 поступает от сумматора В на вход регулятора 11 скорости и формируется при появлении на выходе 1 задатчика управляющего импульса,
амплитуда которого соответствует заданному ускорению тележки 14, а длительность - времени разгона тележки 14. Параллельное соединение консервативных блоков 9 и 10 обеспечивает формирование составляющей сигнала в соответствии с зависимостью (1), каждый из которых формирует свою алгебраическую составляющую зависимости (1). Консервативные
блоки 3 и 4 управляются сигналом
блока 2 извлечения квадратного корня и в совокупности с блоками дифференцирования 7 и перемножения 5 сигналов реализуют зависимости (2),
Формула изобретения
Устройство для управления электро- приводом механизма горизонтального перемещения груза, содержащее задатчик управляющего импульса, блок извлечения квадратного корня, блок перемножения сигналов и сумматор, вы31342866
вход блока извлечения квадратного соответственно к второму и третьему корня подключены к выходу задатчика входам сумматора и к входам первых управляющего импульса, а выходы - двух консервативных блоков.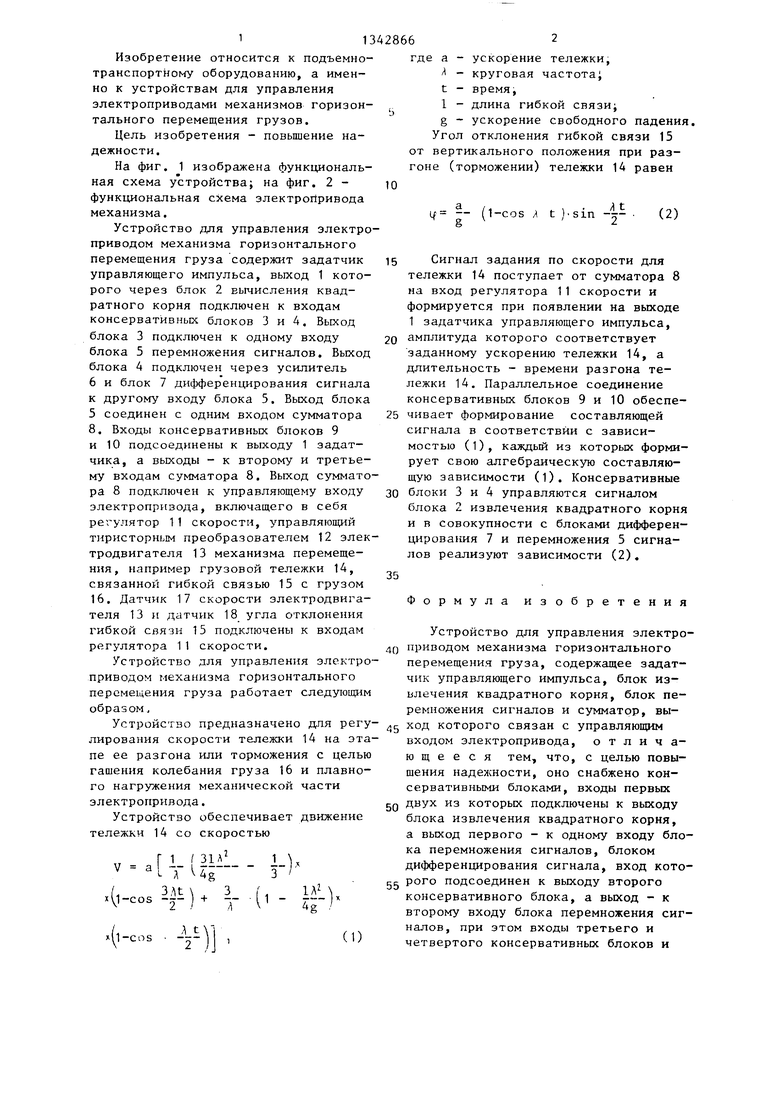
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления электроприводом горизонтального перемещения груза на гибком подвесе | 1987 |
|
SU1528719A1 |
| Устройство для управления электроприводом горизонтального перемещения подвешенного на канате груза | 1986 |
|
SU1379238A1 |
| Устройство для управления приводом передвижения крановой тележки с гибкой подвеской груза | 1991 |
|
SU1799844A1 |
| Устройство для управления электроприводом горизонтального перемещения подвешенного на гибком подвесе груза | 1989 |
|
SU1645237A2 |
| Задатчик скорости механизма горизонтального перемещения груза на гибком подвесе | 1988 |
|
SU1646981A1 |
| Устройство для управления электроприводом механизма горизонтального перемещения подвешенного на канате груза | 1988 |
|
SU1527134A1 |
| Устройство для управления приводом передвижения тележки с гибким подвесом груза | 1989 |
|
SU1684239A1 |
| Устройство для управления приводом перемещения тележки с гибким подвесом грузозахватного органа | 1988 |
|
SU1558851A1 |
| Устройство для управления электроприводом крановой тележки с грузом на гибком подвесе | 1987 |
|
SU1572986A1 |
| Устройство для управления электродвигателем механизма перемещения груза на гибком подвесе | 1990 |
|
SU1799843A1 |
Изобретение относится к области подъемно-транспортного оборудования, а именно к устройствам для управления электроприводом механизма горизонтального перемещения груза. Цель изобретения - повьшение надежности. Консервативные блоки 3, 4, 9, 10 включены параллельно друг другу и соединены с сумматором 8. При подаче на вход блоков 3, 4, 9, 10 эаданицего сигнала при разгоне механизма горизонтального перемещения задающий для регулятора скорости электропривода сигнал формируется в сумматоре 8. 2 ил. lO (Л 10 Фиг. 1
Редактор Н.Лазаренко
Составитель А.Гедеонов Техред А.Кравчук
Заказ 4598/22
Тираж 720Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Фи9.2
Корректор Г.Решетник
| Устройство для управления грузоподъемным транспортным средством с гибкой подвеской груза | 1981 |
|
SU1017655A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
