11
СП
го
СП
СА 4 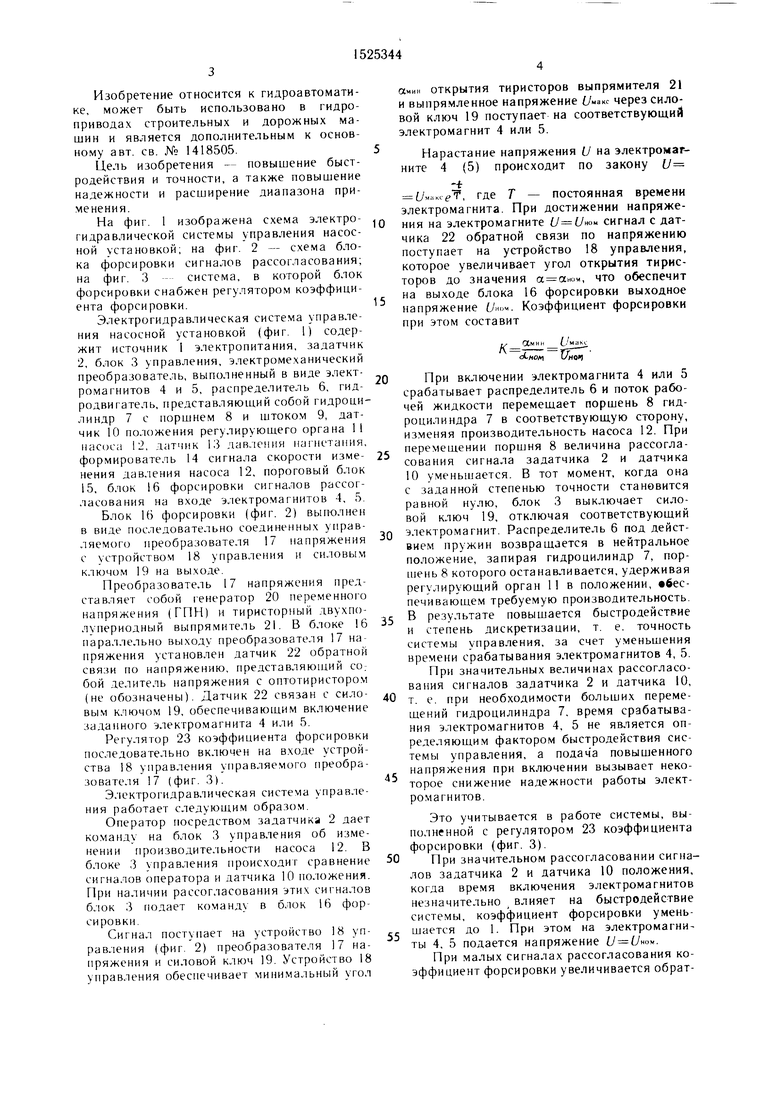
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрогидравлическая система управления насосной установкой | 1986 |
|
SU1418505A1 |
| Система синхронизации скорости движения уборочного сельскохозяйственного агрегата | 1980 |
|
SU938782A1 |
| Устройство для автоматического регулирования давления жидкости в камере | 2020 |
|
RU2755839C1 |
| ЗЛЕКТРОГИДРАВЛИЧЕСКАЯ РЕЛЕЙНО-ИМПУЛЬСНА.Я СЛЕДЯЩАЯ СИСТЕМА | 1971 |
|
SU292140A1 |
| Нажимное устройство | 1980 |
|
SU900906A1 |
| Электрогидравлическая система привода двухстворчатых ворот шлюза | 1986 |
|
SU1472565A1 |
| Способ автоматического регулирования процесса литья пластмасс под давлением | 1979 |
|
SU861089A1 |
| Электропривод постоянного тока | 1983 |
|
SU1115188A1 |
| Способ управления электроприводом лифта с двухскоростным асинхронным электродвигателем и устройство для его осуществления | 1985 |
|
SU1307528A1 |
| МАШИНА ГИДРАВЛИЧЕСКАЯ СИЛОИЗМЕРИТЕЛЬНАЯ ОБРАЗЦОВАЯ | 1997 |
|
RU2122715C1 |
Изобретение может быть использовано в гидроприводах строительных и дорожных машин. Цель изобретения - повышение быстродействия, точности, надежности и расширение диапазона применения системы. Блок 16 форсировки сигналов рассогласования установлен на входе электромеханического преобразователя и выполнен в виде управляемого преобразователя напряжения с датчиком обратной связи по напряжению и силовым ключом на выходе. Блок 16 снабжен регулятором 23 коэффициента форсировки, последовательно включенным на управляющем входе преобразователя напряжения. 1 з.п. ф-лы, 3 ил.
фиг. 3
Изобретение относится к гидроавтоматике, может быть использовано в гидроприводах строительных и дорожных машин и является дополнительным к основному авт. св. № 1418505.
Цель изобретения - повышение быстродействия и точности, а также повышение надежности и расширение диапазона применения.
На фиг. 1 изображена схема электрогидравлической системы управления насосной установкой; на фиг. 2 - схема блока форсировки сигналов рассогласования; на фиг. 3 - система, в которой блок форсировки снабжен регулятором коэффициента форсировки.
Электрогидравлическая система управления насосной установкой (фиг. 1) содержит источник 1 электропитания, задатчик 2, блок 3 управления, электромеханический преобразователь, выполненный в виде электромагнитов 4 и 5, распределитель 6, гидродвигатель, представляющий собой гидроцилиндр 7 с поршнем 8 и штоком 9, датчик 10 положения регулирующего органа II насоса 12, датчик 1,3 давления нагнетания, формирователь 14 сигнала скорости изменения давления насоса 12, пороговый блок 15, блок 16 форсировки сигналов рассогласования на входе электромагнитов 4, 5,
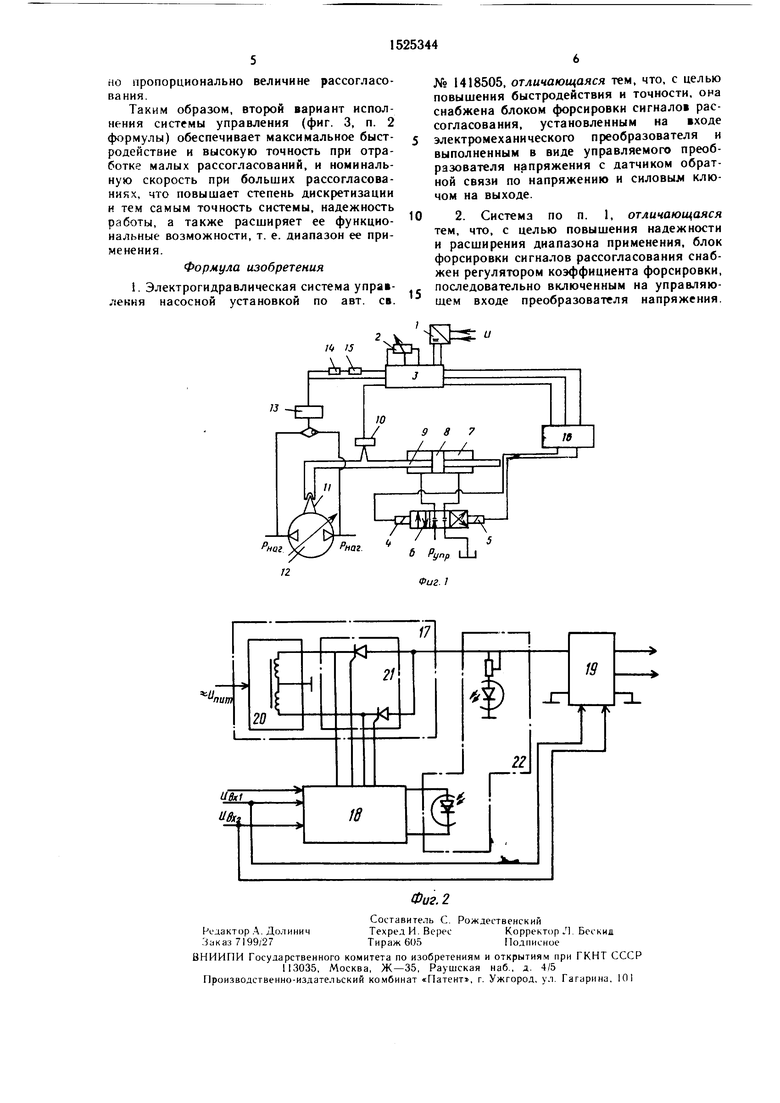
Блок 16 форсировки (фиг. 2) выполнен в виде последовательно соединенных управляемого преобразователя 17 напряжения с устройством 18 управления и силовым ключом 19 на выходе.
Преобразователь 17 напряжения представляет собой генератор 20 переменного напряжения (ГПН) и тиристорный двухпо- лупериодный выпрямитель 21. В блоке 16 параллельно выходу преобразователя 17 напряжения установлен датчик 22 обратной связи по напряжению, представляющий сО; бой делитель напряжения с оптотиристором (не обозначены). Датчик 22 связан с силовым ключом 19, обеспечивающим включение заданного электромагнита 4 или 5.
Регулятор 23 коэффициента форсировки последовательно включен на входе устройства 18 управления управляемого преобразователя 17 (фиг. 3).
Электрогидравлическая система управления работает следующим образом.
Оператор посредством задатчика 2 дает команду на блок 3 управления об изменении фоизводительности насоса 12. В блоке 3 управления происходи сравнение сигналов оператора и датчика 10 положения. При наличии рассогласования этих сигналов блок 3 подает команду в блок 16 форсировки.
Сигнал поступает на устройство 18 управления (фиг. 2) преобразователя 17 напряжения и силовой ключ 19. Устройство 18 управления обеспечивает минимальный угол
5
0
5
0
5
0
5
0
5
амин открытия тиристоров выпрямителя 21 и выпрямленное напряжение Умакс через силовой ключ 19 поступает на соответствующий электромагнит 4 или 5.
Нарастание напряжения U на электромагните 4 (5) происходит по закону (У
-+
tyMaKce, где Т - постоянная времени электромагнита. При достижении напряжения на электромагните сигнал с датчика 22 обратной связи по напряжению поступает на устройство 18 управления, которое увеличивает угол открытия тиристоров до значения , что обеспечит на выходе блока 16 форсировки выходное напряжение (7ж,м. Коэффициент форсировки при этом составит
1 OtwHHС макс
i /lOAl 1/НОЧ
При включении электромагнита 4 или 5 срабатывает распределитель 6 и поток рабочей жидкости перемещает поршень 8 гидроцилиндра 7 в соответствующую сторону, изменяя производительность насоса 12. При перемещении поршня 8 величина рассогласования сигнала задатчика 2 и датчика 10 уменыиается. В тот момент, когда она с заданной степенью точности становится равной нулю, блок 3 выключает силовой ключ 19, отключая соответствующий электромагнит. Распределитель 6 под действием пружин возвращается в нейтральное положение, запирая гидроцилиндр 7, поршень 8 которого останавливается, удерживая регулирующий орган 11 в положении, вбес- печиваюшем требуемую производительность. В результате повышается быстродействие и степень дискретизации, т. е. точность системы управления, за счет уменьшения времени срабатывания электромагнитов 4, 5.
При значительных величинах рассогласования сигналов задатчика 2 и датчика 10, т. е. при необходимости больших перемещений гидроцилиндра 7, время срабатывания электромагнитов 4, 5 не является определяющим фактором быстродействия системы управления, а подач а повышенного напряжения при включении вызывает некоторое снижение надежности работы электромагнитов.
Это учитывается в работе системы, выполненной с регулятором 23 коэффициента форсировки (фиг. 3).
При значительном рассогласовании сигналов задатчика 2 и датчика 10 положения, когда время включения электромагнитов незначительно , влияет на быстродействие системы, коэффициент форсировки уменьшается до 1. При этом на электромагниты 4, 5 подается напряжение U - ,.
При малых сигналах рассогласования коэффициент форсировки увеличивается обратно пропорционально величине рассогласования.
Таким образом, второй вариант исполнения системы управления (фиг. 3, п. 2 формулы) обеспечивает максимальное быстродействие и высокую точность при отработке малых рассогласований, и номинальную скорость при больших рассогласованиях, что повышает степень дискретизации и тем самым точность системы, надежность работы, а также расширяет ее функциональные возможности, т. е. диапазон ее применения.
Формула изобретения
i. Электрогидравлнческая система управления насосной установкой по авт. св.
l/f 15
Рнаг.
№ 1418505, отличающаяся тем, что, с целью повышения быстродействия и точности, она снабжена блоком форсировки сигналов рассогласования, установленным на входе электромеханического преобразователя и выполненным в виде управляемого преобразователя напряжения с датчиком обратной связи по напряжению и силовым ключом на выходе.
ЙтУ
6 PL
Р Фиг. 1
| Электрогидравлическая система управления насосной установкой | 1986 |
|
SU1418505A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
