1128057
Изобретение относится к автоматическому регулированию и может использоваться при исследовании и наладке систем автоматического управления, например систем подчиненного регули- рования в автоматизированных электроприводах.
Цель изобретения - расширение функциональных возможностей устройства
за счет обеспечения возможности изме- tO редачи блока 2 масштабирования, устарения параметров звеньев с передаточной функцией
w(p) . (1)
15 режим интегрирования и возвратив схе му в исходное состояние (интегратор
4сбрасывают на нуль), снова на вход исследуемого звена 1 подают прямоугольный сигнал и в установившемся
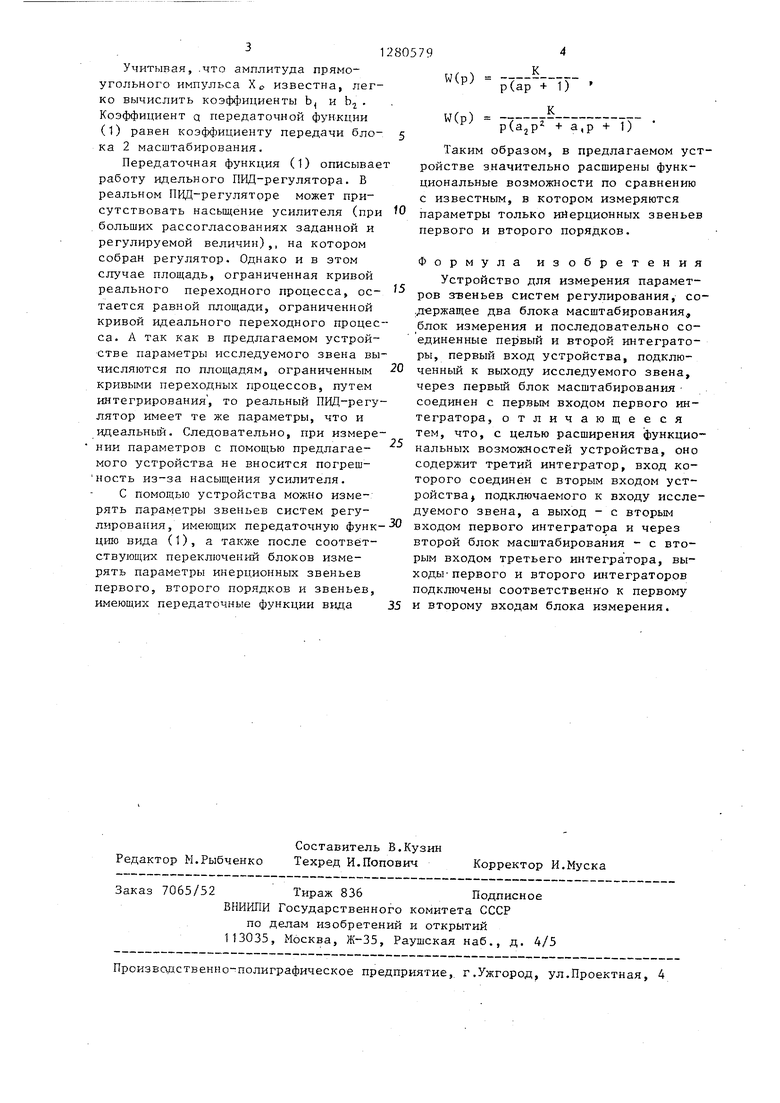
На чертеже изображена блок-схема устройства.
Устройство содержит исследуемое звено 1, первый блок 2 масштабирования, первьй интегратор 3, третий ий- 20 режиме, изменяя коэффициент передачи тегратор 4, второй блок 5 масштабиро- блока 5 масштабирования, добиваются вания, второй интегратор 6, блок 7 измерения.
БЛОКИ масштабиро вания и интеграто 25
нулевого уровня сигнала на выходе интегратора 6 (интегратор 6 - в режиме усиления). После этих операц1-ш устройство откалибровано и переведя интегратор 6 в режим интегрировары могут быть выполнены на интеграль
нулевого уровня сигнала на выходе интегратора 6 (интегратор 6 - в режиме усиления). После этих операц1-ш устройство откалибровано и переведя интегратор 6 в режим интегрирования, можно приступить к определению параметров исследуемого звена. Для этого необходимо вернуть в исных операционных усилителях (например К140УД5). Интеграторы 3 и 6 снабжены переключателем, который позволяет им работать как в режиме интегрирования, так и в режиме усиления. Кро-- ходное состояние (рлтеграторы 4 и 3 .ме того, интеграторы должны иметь сбросить на нуль), подать на вход кнопку сброса на нуль. Эта кнопка звена 1 прямоугольный сигнал и с по- подключается параллельно емкости, ко- мощью блока 7 измерения произвести торая находится в обратной связи one- определение коэффициентов лередаточ- рационного усилителя.35 ной функции (1) на выходе интеграторов 3 и 6 в установивнгемся рен«име, Интеграторы 3 и 6 должны иметь зону нечувствительности, которая необ- , ходима для повышения стабильности измерений параметров. Это связано с 40 мое звено имеет передаточную функцию тем, что практически невозможно точ- (1) можно показать справедливость но установить коэффициент блока 2 масштабирования равным коэффициенту О (см.формулу 1), т.е. всегда присутИспользуя правила структурных преобразований и учитывая, что исследуеизложенного.
Изображение по Лапласу ка выходе интеграторов 3 и 6 имеет вид соотствует погрешность. Следовательно, на входе первого интегратора в установившемся режиме сигнал не равен нулю, а это приводит к тому, что выходная (измеряемая) величина интегратора изменяется во времени. Резуль- тат измерения в этом случае зависит от скорости считывания информации, т.е. различен. Аналогичная картина происходит и с вторым интегратором, только нестабильность выходного сиг- нала проявляется в большей степени.
;
Устройство работает следующим образом.
Процесс измерения состоит из двух операций: установка коэффициентов передачи блоков 2 и 5 масштабирования; непосредственное измерение параметров звена.
Установка коэффициентов.
На вход исследуемого звена подается прямоугольный сигнал. Б установившемся режиме, изменяя коэффициент пенавливают нулевой уровень напряжения на выходе интегратора 3 (интеграторы
3и 6 работают в режиме усиления). После этого, переведя интегратор 3 в
режим интегрирования и возвратив схему в исходное состояние (интегратор
4сбрасывают на нуль), снова на вход исследуемого звена 1 подают прямоугольный сигнал и в установившемся
режиме, изменяя коэффициент передачи блока 5 масштабирования, добиваются
20 режиме, изменяя коэффициент передачи блока 5 масштабирования, добиваются
25
нулевого уровня сигнала на выходе интегратора 6 (интегратор 6 - в режиме усиления). После этих операц1-ш устройство откалибровано и переведя интегратор 6 в режим интегрирова-- ходное состояние (рлтеграторы 4 и 3 сбросить на нуль), подать на вход звена 1 прямоугольный сигнал и с по- мощью блока 7 измерения произвести определение коэффициентов лередаточ- 35 ной функции (1) на выходе интегратония, можно приступить к определению параметров исследуемого звена. Для этого необходимо вернуть в исходное состояние (рлтеграторы 4 и 3 сбросить на нуль), подать на вход звена 1 прямоугольный сигнал и с по- мощью блока 7 измерения произвести определение коэффициентов лередаточ- ной функции (1) на выходе интеграторов 3 и 6 в установивнгемся рен«име, мое звено имеет передаточную функцию (1) можно показать справедливость
Используя правила структурных преобразований и учитывая, что исследуеров 3 и 6 в установивнгемся рен«име, мое звено имеет передаточную функцию (1) можно показать справедливость
изложенного.
Изображение по Лапласу ка выходе интеграторов 3 и 6 имеет вид соот5055
45 ветственно
-, X
Р
Ьг Р
X
о
о
где Х, агчплитуда прямоугольного импульса.
Используя Teopetvry операционного исчисления
Х(оо) lim Р X (р) ,
р- О
получим значения параметров
Х,(«) Ь,Х,, Х,(м) .
fO
1280579
Учитывая, .что амплитуда прямоугольного импульса Хо известна, легко вычислить коэффициенты Ь, и Ь. Коэффициент Q передаточной функции (1) равен коэффициенту передачи бло- 5 ка 2 масштабирования.
Передаточная функция (1) описывает работу идельного ПИД-регулятора. В реальном ПИД-регуляторе может присутствовать насьщение усилителя (при больших рассогласованиях заданной и регулируемой величин),, на котором собран регулятор. Однако и в этом случае площадь, ограниченная кривой реального переходного процесса, остается равной площади, ограниченной кривой идеального переходного процесса. А так как в предлагаемом устройстве параметры исследуемого звена вычисляются по площадям, ограниченным 20 кривыми переходных процессов, путем интегрирования , то реальный ПИД-регу- лятор имеет те же параметры, что и идеальный. Следовательно, при измерении параметров с помощью предлагаемого устройства не вносится погреш- ность из-за насыщения усилителя.
С помощью устройства можно измерять параметры звеньев систем регуJ5
25
W{p)
К
р(ар + 1) К
W(p) -7Т
р(а,,р
а,р + 1)
Таким образом, в предлагаемом у ройстве значительно расширены функ циональные возможности по сравнени с известным, в котором измеряются параметры только инерционных звень первого и второго порядков.
Формула изобретени Устройство для измерения параме ров звеньев систем регулирования, .держап;ее два блока масштабирования блок измерения и последовательно со единенные первый и второй интеграт ры, первый вход устройства, подклю ченный к выходу исследуемого звена через первьш блок масштабирования соединен с первым входом первого ин тегратора, отличающееся тем, что, с целью расширения функци нальных возможностей устройства, он содержит третий интегратор, вход ко торого соединен с вторым входом уст ройства, подключаемого к входу иссл дуемого звена, а выход - с вторым
лирования, имеющих передаточную функ-- входом первого интегратора и через
цшо вида (1), а также после соответствующих переключен™ блоков измерять параметры инерционных звеньев первого, второго порядков и звеньев, имеющих передаточные функции вида
Редактор М.Рыбченко Заказ 7065/52
Составитель В.Кузин Техред И.Попович
Корректор И
Тираж 836Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие,. г.Ужгород, ул.Проектная, 4
К
р(ар + 1) К
-7Т
р(а,,р
а,р + 1)
O
5
0
5
5
Таким образом, в предлагаемом устройстве значительно расширены функциональные возможности по сравнению с известным, в котором измеряются параметры только инерционных звеньев первого и второго порядков.
Формула изобретения Устройство для измерения параметров звеньев систем регулирования, со- .держап;ее два блока масштабирования, блок измерения и последовательно соединенные первый и второй интеграторы, первый вход устройства, подключенный к выходу исследуемого звена, через первьш блок масштабирования соединен с первым входом первого интегратора, отличающееся тем, что, с целью расширения функциональных возможностей устройства, оно содержит третий интегратор, вход которого соединен с вторым входом устройства, подключаемого к входу исследуемого звена, а выход - с вторым
второй блок масштабирования - с вторым входом третьего интегратора, выходы- первого и второго интеграторов подключены соответственно к первому и второму входам блока измерения.
Корректор И.Муска
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения параметров динамических звеньев систем управления | 1986 |
|
SU1335940A1 |
| Устройство для измерения параметров инерционных звеньев систем автоматического регулирования | 1980 |
|
SU877478A1 |
| Устройство для измерения параметров динамических звеньев систем управления | 1977 |
|
SU732823A1 |
| Устройство для измерения параметров динамических звеньев систем регулирования | 1978 |
|
SU930267A1 |
| Устройство для измерения параметров линейных динамических объектов | 1979 |
|
SU864251A1 |
| Устройство для измерения параметров инерционных звеньев систем регулирования | 1987 |
|
SU1418659A1 |
| Устройство для измерения параметров звеньев систем регулирования | 1985 |
|
SU1264141A1 |
| Устройство для измерения параметров инерционных звеньев | 1985 |
|
SU1269100A1 |
| Устройство для измерения параметров инерционных звеньев систем регулирования | 1980 |
|
SU949637A2 |
| Устройство для измерения параметров инерционных звеньев систем регулирования | 1976 |
|
SU622058A1 |
Изобретение относится к технике автоматического регулирования и может использоваться при исследовании и наладке систем автоматического управления. Цель изобретения - расширение функциональных возможностей. Устройство содержит исследуемое звено , первый блок масштабирования 2, вьм интегратор 3, третий интегратор 4, второй блок масштабирования 5, второй интегратор 6, блок измерения 7. Цель достигается за счет введения интегратора 4 и новьпс связей. 1 ил. (Л ю 00 о СД М «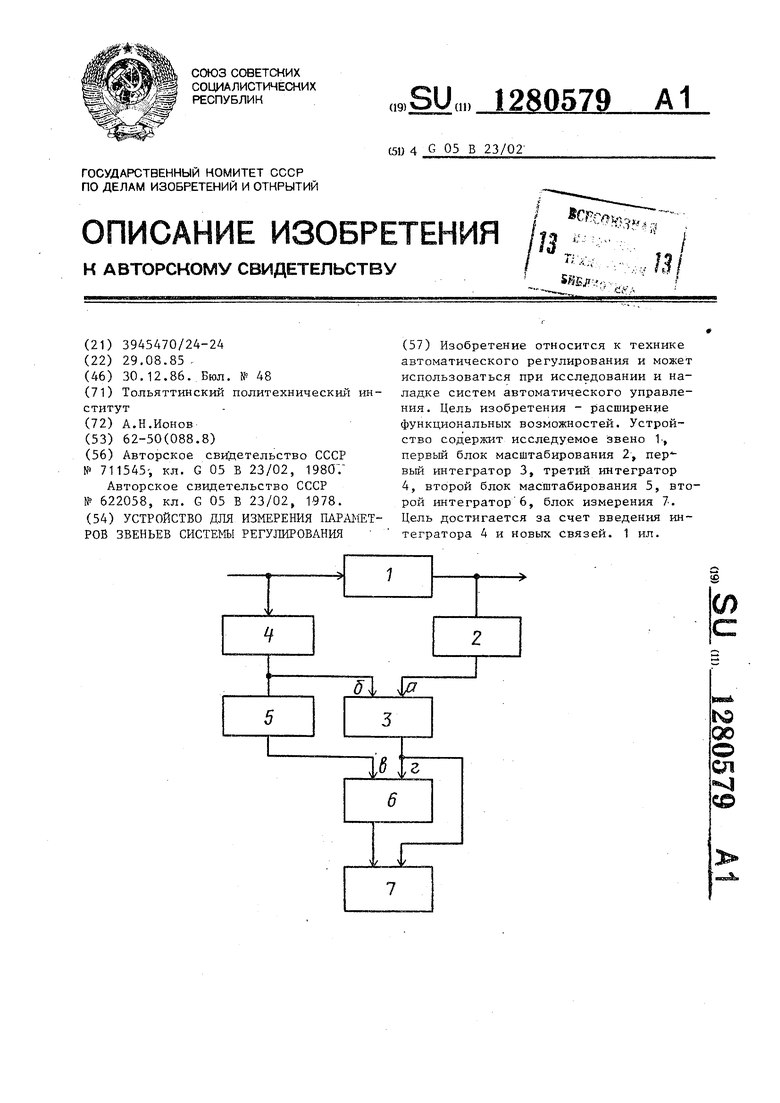
| Устройство для измерения параметров звеньев систем регулирования | 1978 |
|
SU711545A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
