Изобретение относится к области автоматического управления и может быть использовано при исследовании и наладке динамических систем.
Целью изобретения является расширение области применения устройства.
На чертеже изображена функциональная схема предлагаемого устройства.
Устройство содержит исследуемое звено 1, вход которого соединен с входом четвертого интегратора 2, выход - с последовательно соединенными первым интегратором 3 и первым блоком 4 масштабирования, выход которого подключен к входу второго блока 5 масштабирования и к входу а второго интегратора 6, второй вход б которого связан с выходом четвертого интегратора 2, а выход - с входом в третьего интегратора 7, второй вход г которого соединен с выходом второго блока 5 масштабирования, а выход - с одним из входов элемента 8 сравнения, другой вход которого через третий блок 9 масштабирования соединен с выходом первого блока 4 масштабирования, а выход элемента 8 соединен с входом блока 10 измерения.
Интеграторы 6 и 7 должны иметь зону нечувствительности, которая необходима для повышения стабильности измерений параметров. Это связано с тем, что практически невозможно точно установить равные напряжения по входам а и б интегратора 6 и по входам в и г интегратора 7 с помощью блоков 4 и 5 масштабирования соответственно, т.е. всегда будет присутствовать погрешность. Следовательно, на входе интегратора 6 в установившемся режиме сигнал не равен нулю, а это приводит к тому, что выходная величина интегратора изменяется во времени. Аналогичная картина происходит и с интегратором 7, только нестабильность выходного сигнала проявляется в большей степени.
Устройство предназначено для измерения параметров звеньев с передаточной функцией
W(S)
К
aaS + aiS-f 1
и работает следуюшим образом.
На вход исследуемого звена 1 подается входной сигнал. В установившемся режиме, изменяя коэффициент передачи блока 4 масштабирования, устанавливают нулевой уровень сигнала на выходе интегратора 6 (интеграторы 6 и 7 работают в режиме усиления) .
В этом случае коэффициент передачи блока 4 масштабирования будет обратно проРедактор В. Данко Заказ 3802/41
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
порционален статическому коэффициенту исследуемого звена К.
Затем, переведя интегратор 6 в режим интегрирования и вернув схему в исходное
состояние (показания интеграторов 2 и 3 сброшены в «нуль посредством соответст- вуюших кнопок), снова подают сигнал на вход исследуемого звена 1. В установившемся режиме, меняя коэффициент передачи блока 5 масштабирования, добиваются нуле вого уровня сигнала на выходе интегратора 7. В этом случае коэффициент передачи блока 5 масштабирования равен коэффициенту ai передаточной функции (1). Переведя интегратор 7 в режим интегриро5 вания и вернув схему в исходное состояние (показания интеграторов 2, 3 и 6 сброшены в «нуль), снова подают импульс силы.
В установившемся режиме, меняя коэф- 0 фициент передачи блока 9 масштабирования, добиваются нулевого уровня сигнала на выходе элемента 8 сравнения. Коэффициент передачи блока 9 равен коэффициенту а-2 передаточной функции (1).
5 Таким образом, по полученным результатам измерений можно легко определить звено с передаточной функцией (1).
Формула изобретения
0 Устройство для измерения параметров динамических звеньев систем управления, со- держашее блок измерения и последовательно соединенные первый интегратор и первый блок масштабирования, подключенный выходом к входу второго интегратора, соединенного вы5 ходом с входом третьего интегратора, вход первого интегратора подключен к выходу исследуемого звена, а второй вход третьего интегратора через второй блок масштабирования соединен с выходом первого блока масштабирования, отличающееся тем, что, с
целью расширения области применения устройства, оно содержит третий блок масштабирования, элемент сравнения и четвертый интегратор, вход которого подключен к входу исследуемого звена, а выход - к второму
5 входу второго интегратора, первый вход элемента сравнения подключен к выходу третьего интегратора, второй вход через третий блок масштабирования соединен с выходом первого блока масштабирования, а выход подключен к первому измерительному входу
0 блока измерения, соединенного вторым и третьим измерительными входами с выходами соответственно второго и третьего интеграторов.
Составитель А. Л еще в
Техред И. ВересКорректор В. Гирняк
Тираж 863Подписное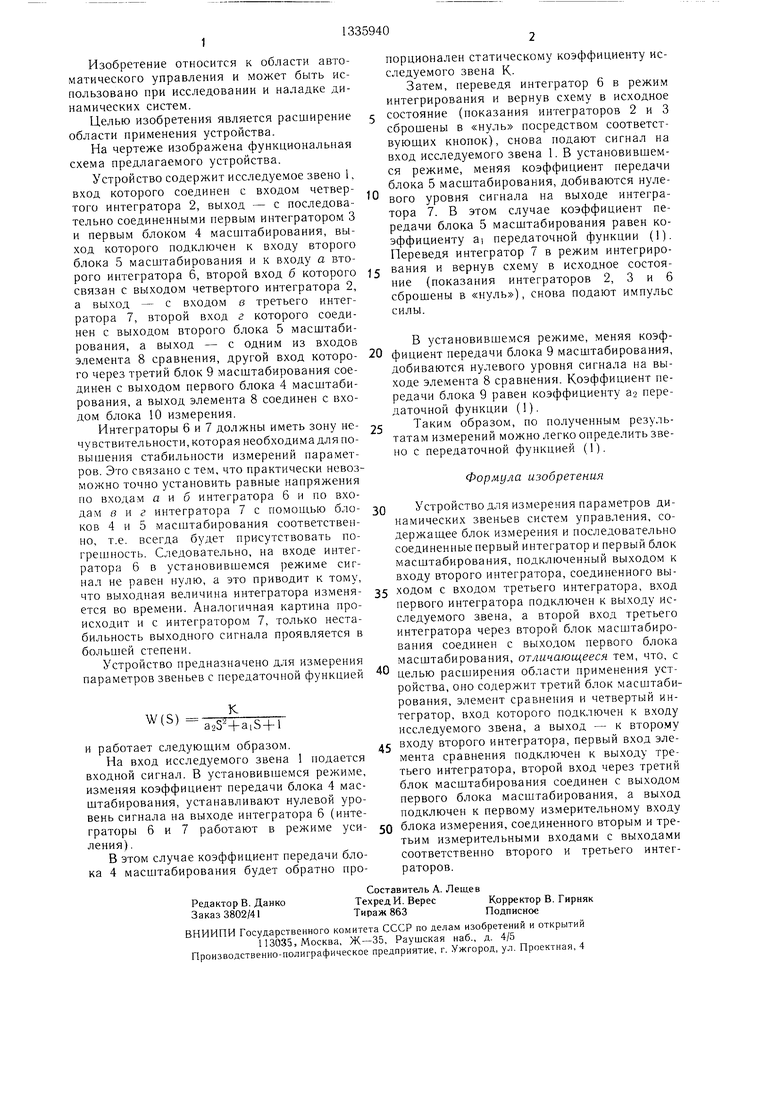
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения параметров инерционных звеньев систем регулирования | 1987 |
|
SU1418659A1 |
| Устройство для измерения параметров звеньев систем регулирования | 1985 |
|
SU1280579A1 |
| Устройство для измерения параметров линейных динамических объектов | 1979 |
|
SU864251A1 |
| Устройство для измерения параметров динамических звеньев систем управления | 1977 |
|
SU732823A1 |
| Устройство для измерения параметров динамических звеньев систем регулирования | 1978 |
|
SU930267A1 |
| Устройство для измерения параметров инерционных звеньев | 1985 |
|
SU1269100A1 |
| Устройство для измерения параметров звеньев систем регулирования | 1985 |
|
SU1264141A1 |
| Устройство для измерения параметров инерционных звеньев систем автоматического регулирования | 1980 |
|
SU877478A1 |
| Устройство для измерения параметров инерционных звеньев систем регулирования | 1980 |
|
SU949637A2 |
| Устройство для измерения параметров звеньев систем регулирования | 1978 |
|
SU711545A1 |
Изобретение относится к области автоматического управления и может быть использовано при исследовании и наладке динамических систем. Цель изобретения - расширение области применения. Введение четвертого интегратора 2, элемента сравнения 8 и третьего блока 9 масштабирования позволяет измерять параметры инерционных звеньев первого и второго порядка в процессе работы, когда на вход подается сигнал в виде ненормированного импульса, имеющего произвольную форму и длительность, 1 ил. со оо ОС ел со 4
| Устройство для измерения параметров инерционных звеньев систем регулирования | 1976 |
|
SU622058A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для измерения параметров динамических звеньев систем управления | 1977 |
|
SU732823A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
