00 ОС О5
to
Изобретение относится к электротехнике, к электрическим машинам, обеспечивающим совмещение перемещени подвижного элемента в аксиальном на- правлении с его вращением вокруг продольной оси двигателя, и может применяться в текстильном машиностроении, станкостроении, робототехничес- ких системах и других устройствах, требующих винтового перемещения рабочего органа.
Целью изобретения является расширение функциональных возможностей путем обеспечения винтового перемеще ния с переменным и регулируемым шагом, независимых вращательного и аксиального перемещений якоря, а также изменения закона перемещения якоря в процессе работы и широкого диапа- зона регулирования его частоты вращения и скорости аксиального перемещения при упрощении конструкции, повышении технологичности и повьш1ении КПД.
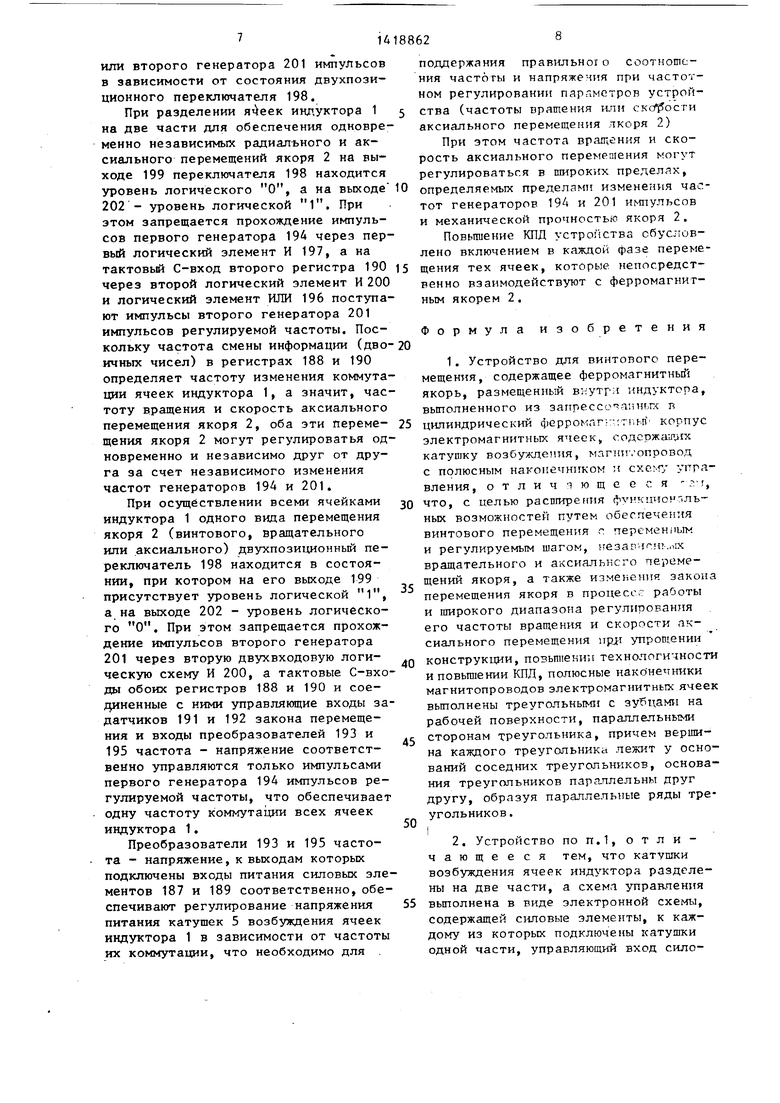
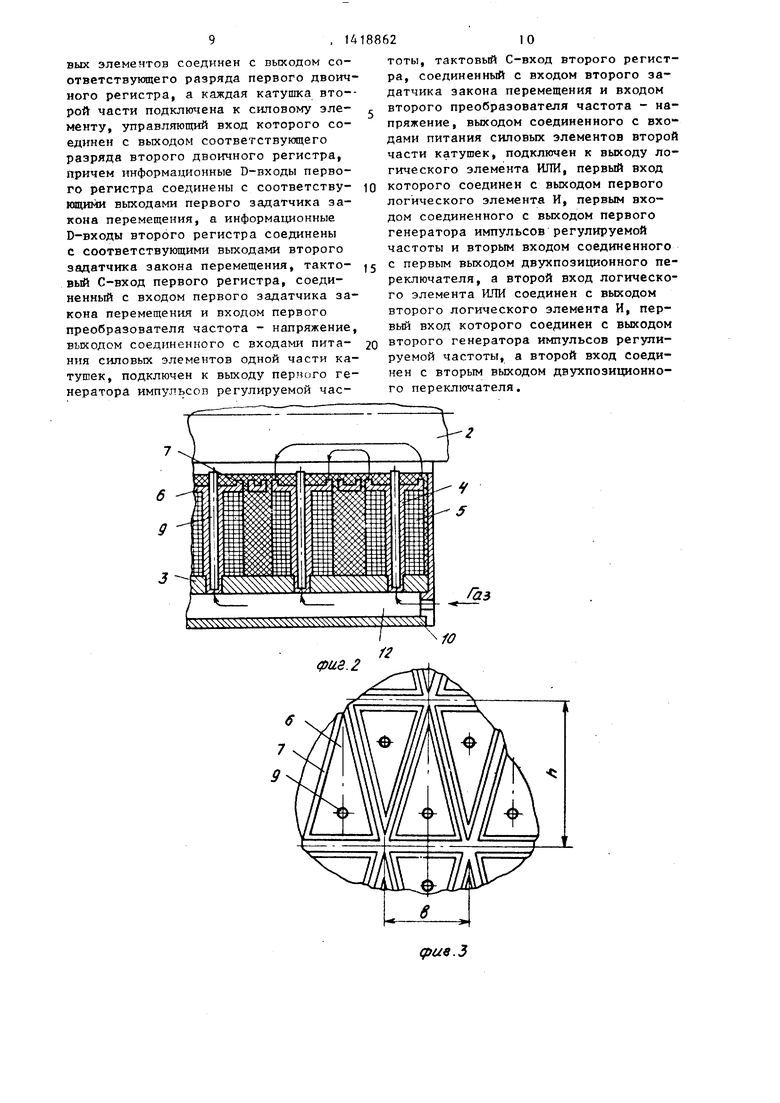
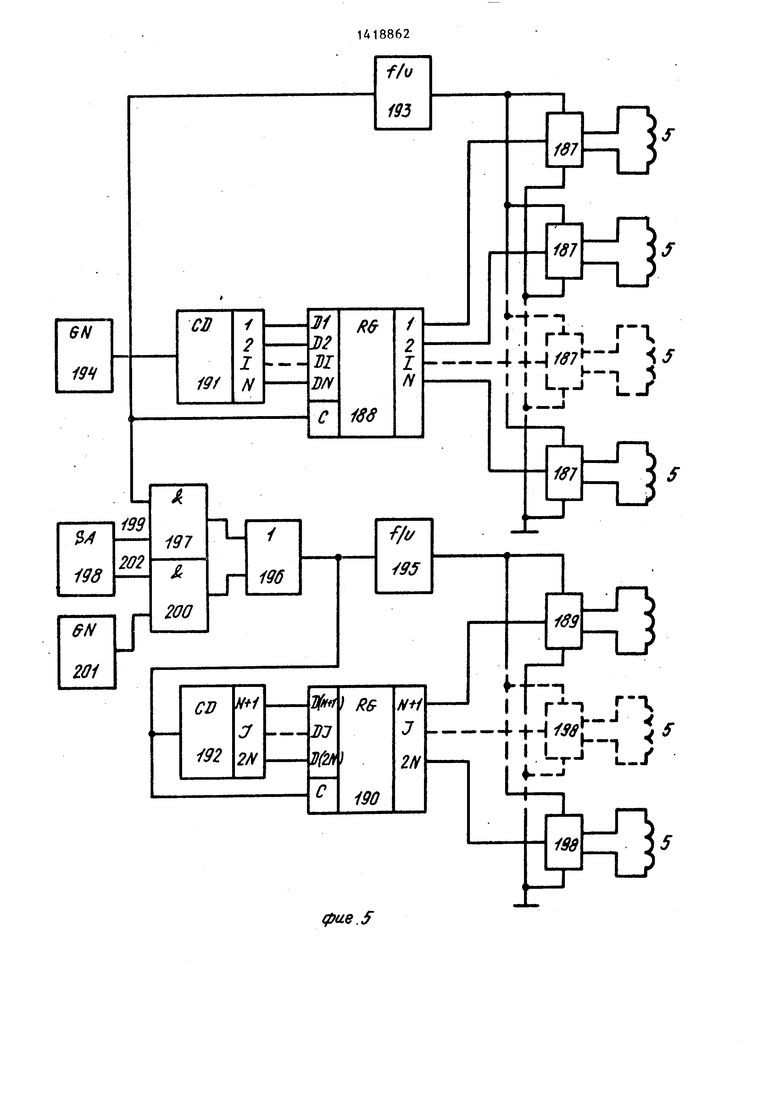
На фиг„1 представлено устройство для винтового перемещения, общий вид на фиг.2 - наборный иМдуктор устройства, вид сверху; на фиг.З - то же, сечение; на фиг.4 - развертка на плоскость внутренней поверхности индуктора; на фиг.З - структурная схема управления коммутацией магнитных ячеек и регулирования частоты вращения и скорости аксиального перемещения .
I
Устройство для винтового перемещения состоит из индуктора 1 и ферромагнитного якоря 2. Индуктор 1 представляет собой цилиндрический стакан 3, в отверстия которого запрессованы магнитопроводы А ячеек, на которых находятся катушки 5 возбуждения. Маг- нитопровод 4 имеет треугольный полюс- ньш наконечник 6, на рабочей поверх- ности которого вьшолнены зубцы 7, расположенные параллельно сторонам наконечника. На рабочую поверхность ячеек нанесен слой 8 немагнитного антифрикционного материала, обеспечи- вающий гладкую поверхность рабочего зазора, а также устойчивый газомаг нитный подвес якоря 2. В теле магни- топровода 4 вьтолнен канал 9, обеспечивающий подвод сжатого газа в рабо- чий зазор устройства. Индуктор 1 установлен в корпус 10 и закрыт крьппкой 11. Между корпусом 10 и цилиндрическим стаканом 3 образована камера 12,
Q
5 0 5
О
5
0 5 Q
предназначенная для распределения сжатого газа между каналами 9. Якорь 2 представляет собой ферромагнитный цилиндр без выступов и зубцов, с гладкой поверхностью.
Магнитные ячейки 13 - 186 образуют фрагмент индуктора (фиг.З). Немагнитный антифрикционный слой, зубцы на рабочей поверхности полюсных наконечников и каналы для подвода сжатого газа на фиг.З не показаны. Катушка 5 возбуждения каждой из образующих индуктор ячеек подключена к одному из силовых элементов 187 (фиг,4), управляющими входами подключенных к выходам разрядов первого двоичного регистра 188, или к одному из аналоговых снловьгх элементов 189, управляющими входами подключенных к выходам разрядов второго двоичного регистра 190. Информационные D-входы первого регистра 188 подключены к. соответствующим выходам первого за- датчика 191 закона перемещения, а информационные D-входы второго регистра 190 - к соответствующим выходам второго задатчика 192 закона перемещен ния, причем тактовый С-вход первого регистра 188 соединен с входом первого задатчика 191 закона перемещения и с входом первого преобразователя 193 частота - напряжение, выходом подключенного к питающим входам силовых элементов 187, и подключен к выходу первого генератора 194 импульсов регулируемой частоты, а тактовый С-вход второго регистра 190 соединен с входом второго задатчика 192 закона перемещения и с входом второго преобразователя 195 частота - напряжение, выходом подключенного к входам питания силовых элементов 189| и подключен к выходу логического элемента ИЛИ 196, первый вход которого соединен с выходом первого логического элемента И 197, первым входом соединенного с выходом первого генератора 194.импульсов, а вторым входом соединенного с выходом 199 двузпозиционно- го переключателя 198, а второй вход логического элемента ИЛИ 196 соединен с вькодом второго логического элемента И 200, первым входом соединенного с выходом второго генератора 201 импульсов регулируемой частоты, а вторым входо - с выходом 202 двухпози- ционного переключателя 198.
Устройство работает следующим образом.
При подаче в камеру 12 сжатого газа последний через каналы 9 в магни- топроводах 4 ячеек поступает в рабочий зазор между индуктором 1 и якоре 2. При этом якорь 2 всплыпает в слое газовой смазки под действием подъемной силы газового слоя.
Движение магнитной волны, определяющее перемещение якоря 2, создается при подключении катушек 5 возбуждения магнитных ячеек к источникам напряжения (преобразователям 193 и 19 частота - напряжение) в определенной последовательности, устанавливаемой задатчиками 191 и 192 закона перемещения.
Сочетание в газомагнитном подвесе якоря 2 подъемной силы газового слоя и электромагнитной силы притяжения якоря к индуктору, создаваемой рабочим электромагнитным полем индуктора обеспечивает наряду с устойчивостью адаптивность устройства к изменению внешних нагрузок.
Поскольку закон перемещения якоря 2 задается последовательностью переключения ячеек (или групп ячеек), изменение такой последовательности обеспечивает изменение (регулирование) шага винтового перемещения или другие виды перемещения (вращательно или аксиальное) якоря 2.
Характер перемещения якоря 2 и изменение шага винтового перемещения поясняется ф иг.З.
Объединение в группу (при параллельном включении катушек 5) ячеек 13,14,43,А4,73 и 74 с последующим переключением на группу ячеек 43,44, 73,74,103 и 104, далее на группу 73, 74,103,104,133,134 и т.д. вызывает винтовое движение (с определенным шагом) магнитной волны, чем обусловливается винтовое перемещение якоря 2. Коммутация групп ячеек 158,159, 130,131,102,103 - 130,131,102,103, 74,75 - 102,103,74,75,46,47 - 74,75, 46,47,18,19 и т.д. вызывает винтовое
перемещение якоря с тем же шагом, но с обратным направлением винтового перемещения.
Объединением в группу ячеек 13... 16, 43...48, 75...78 с последующим переключением на группу ячеек 45.. .48, 75...80, 107...110, далее на группу ячеек 77...80, 107...112, 139...142, затем на группу 109...112, 139...144, 171... 174 и т.д. достигается увели10
20
.
с
чение шага винтового переме Г1ення якоря 2.
Дальнейшее увеличение шага втшто- вого перемещения якоря 2 может быть достигнуто, например, коммутацией групп ячеек 13...20, 43...50 - 47... 54, 77...84 - 81...88, 111...118 - 115...122, 145...152 - ...156, 179...186.
Винтовое прремешенне якоря 2 может быть также получено объединением в группу ячеек 14, 15, 16,43 .. .48, 75...80,107,108,109 с последующим 15 переключением на группу ячеек 46,47, 48,75...80,107..,112,139,140,141 и далее 78,79,80, 107 ... 112,139...144, 171,172,173 и т.д. Для увеличения шага винтового перемещения возможно объединение в группу ячеек 14... 18, 43...52, 77...86, 111...115 с последующим переключением на группу ячеек 48...52, 77...86, 111..,120, 145... 149, далее на группу 82,..86, 111... 120, 145...154, 179...183 и т.д.
Коммутация групп ячеек 13...99 - 42...128 - 71...157 - 100...186 позволяет получить вращательное дв5ше- ние-якоря 2.
Коммутация грл-пп ячеек 13... 18, 42...47, 71...76, 100...105, 129... 134, 158...163 - 15...20. 44...49, 73...78, 102...107, 131...136, 160...165 - 17,..22, 46...51, 75... 104. ..109, 133, ,.138, 162...167
25
30
35
40
45
80,
и т.д. позволяет аксиальное (лине1 1ной) перемещение якоря 7.
Как видно из приведенных примеров, изменение закона перемещения якоря 2 (шага винтового перемещения, вращательного или аксиального перемещений) достигается изменением геометрической конфигураг1ии магнитных элементов, складывающихся из пар.аллельно вклю- ченных магнитных ячеек (катушек 5 воз- |буждения) . Любая необходимая для осу- |ществления винтового перемещения с различным шагом или вращательного движе
ния, или аксиального перемещения форма магнитных элементов легко синтезируется из ячеек треугольной формы при максимально возможной плотности заполнения поверхности индуктора, что недостижимо при какой-либо другой форме ячеек, в связи с чем полюсные наконечники 6 магниопроводов 4 электромагнитных ячеек выполнены треугольной формы.
5 .14
Частота вращения якоря 2 или скорость его аксиального перемещения опредяется частотой переключения групп ячеек.
Разделив ячейки индуктивно на две равных части и используя первуя часть для получения вращательного, а вторую часть для получения аксиального перемещения якоря 2, а также обеспечив независимое регулирование частоты вращения и скорости аксиального перемещения якоря 2, можно получить одновременно независимые вращательное и аксиальное его движения. Результирующее движение якоря 2 оказывается в таком случае винтовым, причем шаг винтового перемещения определяется частотой вращения и скоростью аксиального перемещения якоря 2. Раздельное и независимое регулирование частоты вращения и скорости аксиа.ьного перемещения якоря 2 позволяет плавно и в пгироких пределах регулировать шаг его винтового перемещения.
Изменение количества одновременно (параллельно) включаемых ячеек индуктора позволяет изменять и регулировать электромагнитное усилие, а значит, и мощность винтового, вращательного или аксиального движения якоря 2,
Указаиньй порядок осуществления винтового, вращательного или аксиального движения не требует вьтолнения на рабочей поверхности якоря зубцов или выступов, поэтоьгу якорь 2, вьтол- няемьй из ферромагнитного материала, имеет гладкую цилиндрическую поверхность.
Поскольку в каждой фазе винтового (или вращательного, или аксиального) движения якоря 2 каждая катущка возбуждения ячеек индуктора имеет одно из двух возможных состояний (включена или выключена), состояние всех катушек определяется двоичным числом с количеством разрядов, равным количеству катушек возбуждения в индукторе, причем каждый разряд двоичного числа характеризует состояние определенной катушки возбуждения, двоичное число 1 в разряде соответствует включенному состоянию катушки, а двоичное число О - выключенному состоянию катушки.
При разделении всех катушек воз- бу;:у;п ния на две равные части, первая из которых обеспечивает вращательное
626
перемещение якоря 2, а вторая - его аксиальное перемещение, катушки 5 первой части ячеек аодключены к сило- вым злементам 187 (фиг.4), управляющий вход каждого из которых подключен к выходу определенного разряда (от 1 до N) первого N-разрядного двоичного регистра 188, а катушка 5 второй части ячеек подключены к аналогичным силовым элементам 189, управляющий вход каждого из которых соединен с выходом определенного разряда (от N+1 до 2N).второго N-разрядного двоичного регистра 190. Два N-раз- рядных двоичных числа, записанных в регистры 188 и 190, однозначно определяют состояние всех ячеек индуктора 1 в определенной фазе перемещения
якоря 2, а изменение указанных двоич- ньк чисел определяет порядок коммутации ячеек. При этом информация на D-входы первого регистра 188 посту- пает с выходов первого задатчика 191
закона перемещения, формирующего последовательность двоичных чисел, записываемых в регистр 188, а информация на D-входы второго регистра 190 поступает с выходов второго задатчика 192 закона перемещения, формирующего последовательность двоичных чисел, записьгааемых в регистр 190. В качестве задатчиков 191 и 192 закона перемещения может быть использован управляемый электронньй коммутатор
или постоянное запоминакяцее устройство, или считьгоающее уст1 ойство, или процессор управляющей ЭВМ,
Запись в регистры 188 и 190 информации, поступающей с выходов задатчиков 191 и. 192 закбна перемещения соответственно, осуществляется импульсами, поступающими на тактовые С-входы регистров 188 и 190 от генераторов 194 и 201 импульсов регулируемой частоты. При этом на тактовый С-вход первого регистра 188, соединенный с управляюощм входом задатчика 191 закона перемещения и входом первого преобразователя 193 частотанапряжение, поступают импульсы пер- , вого генератора 194 импульсов, а на тактовьй С-вход второго регистра 190,- соединенньй с управляющим входом
второго задатчика 192 закона пере- мещения и управляющим входом второго преобразователя 195 частота - на- I пряжение, могут поступать импульсы
или первого генератора 194 импульсов.
или второго генератора 201 импульсов в зависимости от состояния двухпози- ционного переключателя 198.
При разделении индуктора 1 на две части для обеспечения одновременно независимых радиального и аксиального перемещений якоря 2 на выходе 199 переключателя 198 находится уровень логического О, а на выходе 202 - уровень логической 1, При этом запрещается прохождение импульсов первого генератора 194 через первый логический элемент И 197, а на тактовый С-вход второго регистра 190 через второй логический элемент И 200 и логический элемент ИЛИ 196 поступают импульсы второго генератора 201 импульсов регулируемой частоты. Поскольку частота смены информации (дво ичных чисел) в регистрах 188 и 190 определяет частоту изменения коммутации ячеек индуктора 1, а значит, частоту вращения и скорость аксиального перемещения якоря 2, оба эти переме- щения якоря 2 могут регулироватья одновременно и независимо друг от друга за счет независимого изменения частот генераторов 194 и 201.
При осуществлении всеми ячейками индуктора 1 одного вида перемещения якоря 2 (винтового, вращательного или аксиального) двухпозиционный переключатель 198 находится в состоянии, при котором на его выходе 199 присутствует уровень логической 1, а на выходе 202 - уровень логического О. При этом запрещается прохождение импульсов второго генератора 201 через вторую двухвходовую логическую схему И 200, а тактовые С-вхо- ды обоих регистров 188 и 190 и сое- р ненные с ними управляющие входы за- датчиков 191 и 192 закона перемещения и входы преобразователей 193 и 195 частота - напряжение соответственно управляются только импульсами первого генератора 194 импульсов регулируемой частоты, что обеспечивает одну частоту коммутации всех ячеек индуктора 1.
Преобразователи 193 и 195 частота - напряжение, к выходам которых подключены входы питания силовых элементов 187 и 189 соответственно, обеспечивают регулирование напряжения питания катушек 5 возбуждения ячеек индуктора 1 в зависимости от частоты их коммутации, что необходимо для
5 0 5
0 0
5
5
0
5
поддержания правильного соотношения частоты и напряжения при частотном регулировании парсчмстров устройства (частоты вращения или cKcfi ocrH аксиального перемещения лкоря 2)
При этом частота вращгния и скорость аксиального перемешения могут регулироваться в широких пределах, определяемых пределами изменения частот генераторов 19Д и 201 импульсов и механической прочностью якоря 2.
Повьпиение КПД устройства обусловлено включением в каждой фазе перемещения тех ячеек, которые непосредственно взаимодействуют с ферромагнитным якорем 2.
Формула изобретения
1.Устройство для винтового перемещения, содержащее ферромагнитньш якорь, размещенный внутри индуктора, выполненного из запрессо чаиньпс в цилиндрический ферромаг:-:;:тГ|Ьп корпус электромагнитных ячеек, содсржавдгх катушку возбуждения, магни . опровод
с полюсным наконечником и схс-.г/ управления, отличающееся .пм, что, с целью распгиреяия функиионпль- ных возможностей путем обеспечения винтового перемещения г. переменным и регулируемым шагом, ь-езариги -.ож вращательного и аксиальксго перемещений якоря, а также изменения закона перемещения якоря в процессе работы и широкого диапазона регулирования его частоты вращения и скорости аксиального перемещения upii упропюнии конструкции, повьш1ении технологичности и повышении КПД, полюсные нако нечники магнитопроводов электромагнитных ячеек выполнены треугольными с зутйцами на рабочей поверхности, параллельными сторонам треугольника, причем вершина каткдого треугольникг лежит у оснований соседних треугольников, основания треугольников параллельны друг другу, образуя параллельные ряды треугольников.
I
2.Устройство по П.1, отличающееся тем, что катупжи возбуждения ячеек индуктора разделены на две части, а схема управления выполнена в виде электронной схемы, содержащей силовые элементы, к каждому из которых подключены катушки одной части, управляющий вход силовых элементов соединен с выходом соответствующего разряда первого двоичного регистра, а каждая катушка второй части подключена к силовому эле- менту, управляющий вход которого соединен с выходом соответствующего разряда второго двоичного регистра, причем информационные D-входы первого регистра соединены с соответству- ющими выходами первого задатчика закона перемещения, а информационные D-входы второго регистра соединены с соответствующими выходами второго задатчика закона перемещения, такто- вый С-вход первого регистра, соединенный с входом первого задатчика закона перемещения и входом первого преобразователя частота - напряжение, выходом соединенного с входами пита- ния силовых элементов одной части катушек, подключен к выходу парного генератора импульсов регулируемой частоты, тактовый С-вход второго регистра, соединенный с входом второго задатчика закона перемещения и входом второго преобразователя частота - напряжение, выходом соединенного с вхо дами питания силовых элементов второй части катушек, подключен к выходу логического элемента ИЛИ, первый вход которого соединен с выходом первого логического элемента И, первым входом соединенного с выходом первого генератора импульсов регулируемой частоты и вторым входом соединенного с первьт выходом двухпозиционного переключателя, а второй вход логического элемента ИЛИ соединен с выходом второго логического элемента И, первый вход которого соединен с выходом второго генератора импульсов регулируемой частоты, а второй вход соединен с вторым выходом двухпозиционного переключателя.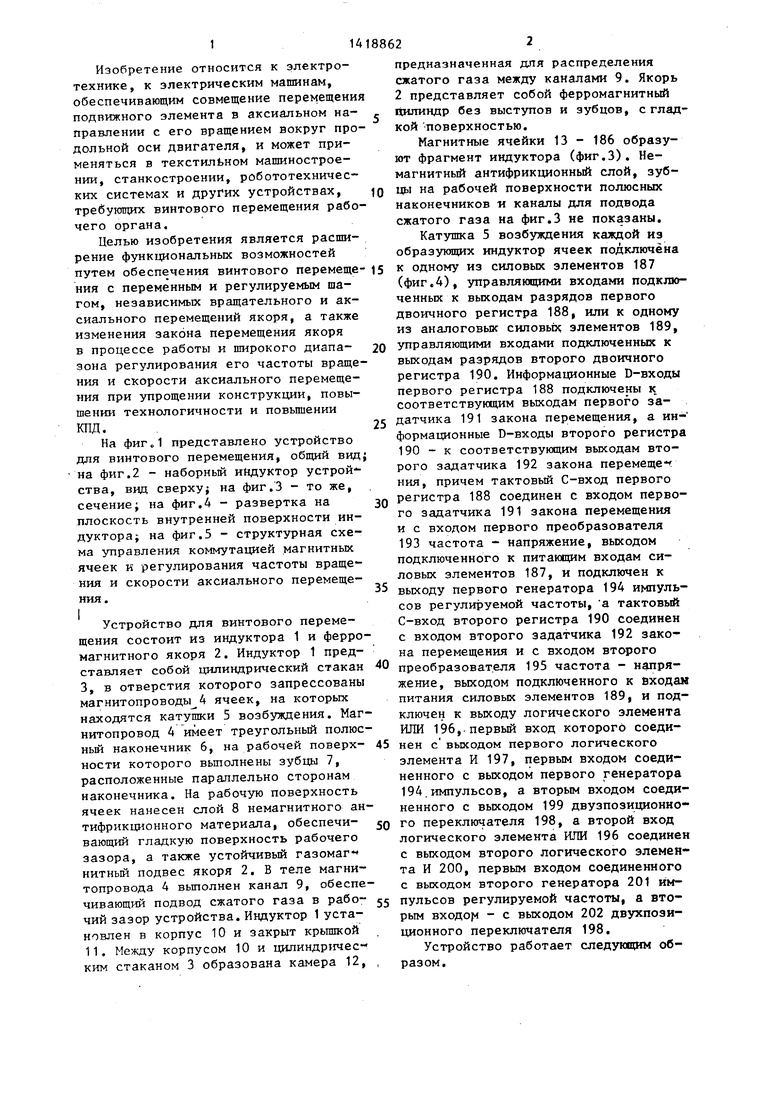


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления многофазным двигателем возвратно-поступательного движения | 1986 |
|
SU1417158A1 |
| ПРИЕМОНАМАТЫВАЮЩЕЕ УСТРОЙСТВО | 1991 |
|
RU2022900C1 |
| Автоматизированный прядильный модуль | 1988 |
|
SU1684360A1 |
| Устройство для дуговой сварки с поперечными колебаниями сварочной горелки | 1983 |
|
SU1133059A1 |
| Устройство для перемещения и колебаний сварочной горелки | 1988 |
|
SU1547995A1 |
| Устройство для программного управления намоточным станком | 1989 |
|
SU1725184A1 |
| Устройство для программного управления намоточным станком | 1990 |
|
SU1784942A1 |
| Линейный электропривод возвратно-поступательного движения | 1987 |
|
SU1598098A1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА | 2009 |
|
RU2407135C2 |
| ОДНОФАЗНЫЙ БЕСКОНТАКТНЫЙ МАГНИТОЭЛЕКТРИЧЕСКИЙ ГЕНЕРАТОР | 2009 |
|
RU2393615C1 |
Изобретение относится к электротехнике и может применяться в текстильном машиностроении, станкостроении, робототехнических системах и других устройствах, требующих винтового перемещения рабочего органа. Цель изобретения - расширение функциональных возможностей путем обеспечения винтового перемещения с переч менным и регулируемым шагом, независимых вращательного и аксиального перемещений якоря, а также изменение закона перемещения якоря в процессе работы и широкого диапазона регулирования его частоты вращения и скорости аксиального перемещения при упрощении конструкции, повьшение технологичности и повьшений КПД. Устройство содержит индуктор 1 в виде цилиндрического корпуса 3, в отверстии которого запрессованы магнитопроводы ячеек с катушками возбуждения. Магни- топровод имеет треугольный полюсный наконечник 6 с параллельными его сторонам с зубцами. На рабочую поверхность ячеек нанесен слой 8 немагнитного антифрикционного материала, обеспечивающий гладкую поверхность рабочего зазора, устойчивый газомагнитный подвес ферромагнитного гладкого якоря 2. Катушки возбуждения ячеек со схемой управления обеспечивают включения ячеек в том порядке, который определяет необходимый закон перемещения якоря. 1 з.п.ф-лы, 5 ил. г S (Л
qju9.3
.
i98
eN 20i
202
0
:0
i-n
4J
-J
r
| Способ изготовления полуфабрикатов из волокнистых композиционных материалов | 1988 |
|
SU1585363A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
