OG СО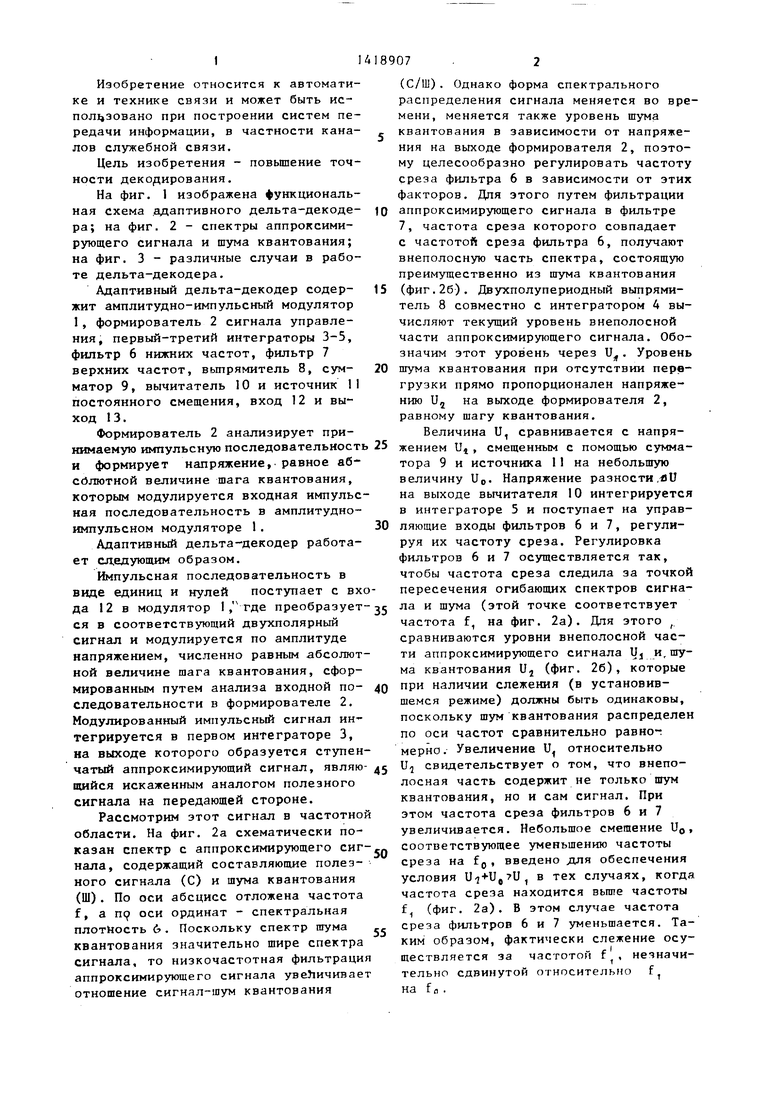

| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивный дельта-кодер | 1987 |
|
SU1425839A1 |
| Дельта-кодер с инерционным компандированием | 1985 |
|
SU1305877A1 |
| Система связи с дельта-модуляцией | 1983 |
|
SU1163476A1 |
| Дельта-кодек | 1989 |
|
SU1725398A1 |
| Устройство для передачи и приема многопозиционных широкополосных сигналов | 1988 |
|
SU1748270A2 |
| Система связи с асинхронной дельта-модуляцией | 1989 |
|
SU1624695A1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ИСХОДНОГО СИГНАЛА ПРИ ДЕЛЬТА-МОДУЛЯЦИИ И УСТРОЙСТВО ДЛЯ ДЕЛЬТА-ДЕМОДУЛЯЦИИ | 1994 |
|
RU2129333C1 |
| Дельта-модулятор | 1985 |
|
SU1288915A1 |
| Дельта-модулятор | 1988 |
|
SU1510090A2 |
| СИСТЕМА СВЯЗИ С ДВУХПАРАМЕТРИЧЕСКОЙ ДЕЛЬТА-МОДУЛЯЦИЕЙ | 1991 |
|
RU2009614C1 |

Изобретение относится к автоматике и технике связи. Его использование в системах передачи информации, в частности в каналах служебной связи, позволяет повысить точность декодирования. Адаптивный дельта-декодер содержит амплитудно-импульсный модулятор J, формирователь 2 сигнала управления, интегратор 3, фильтр 6 нижних частот, сумматор 9 и источник 11 постоянного смещения. Благодаря введению интеграторов 4, 5, фильтра 7 верхних частот, выпрямителя 8 и вычи- тателя 10 обеспечивается следящая фильтрация той части сигнала, уровень которой выше уровня шума квантования. 3 ил.
Фиг.
Изобретение относится к автоматике и технике связи и может быть ис- пол1 зовано при построении систем передачи информации, в частности каналов служебной связи.
Цель изобретения - повьшение точности декодирования.
На фиг. 1 изображена функциональная схема .адаптивного дельта-декодера; на фиг. 2 - спектры аппроксимирующего сигнала и шума квантования; на фиг. 3 - различные случаи в работе дельта-декодера.
Адаптивный дельта-декодер содержит амплитудно-импульсный модулятор 1, формирователь 2 сигнала управления, первый-третий интеграторы 3-5, фильтр 6 нижних частот, фильтр 7 верхних частот, вьтрямитель 8, сумматор 9, вычитатель 10 и источник 11 постоянного смещения, вход 12 и выход 13.
Формирователь 2 анализирует при(С/Ш). Однако форма спектрального распределения сигнала меняется во времени, меняется также уровень шума J квантования в зависимости от напряжения на выходе формирователя 2, поэтому целесообразно регулировать частоту среза фильтра 6 в зависимости от этих факторов. Для этого путем фильтрации
10 аппроксимирующего сигнала в фильтре 7, частота среза которого совпадает с частотой среза фильтра 6, получают внеполосную часть спектра, состоящую преимущественно из шума квантования
15 (фиг.26). Двухполупериодный выпрямитель 8 совместно с интегратором 4 вычисляют текущий уровень внеполосной части аппроксимирующего сигнала. Обозначим этот уровень через U. Уровень
20 шума квантования при отсутствии перегрузки прямо пропорционален напряжению Uj на выходе формирователя 2, равному шагу квантования.
Величина U. сравнивается с напрянимаемуто импульсную последовательность 25 жением U , смещенным с помощью суммаи формирует напряжение, равное аб- сблютной величине шага квантования, которым модулируется входная импульсная последовательность в амплитудно- импульсном модуляторе 1.30
Адаптивный дельта-декодер работает сдедутощим образом.
Импульсная последовательность в виде единиц и нулей поступает с входа 12 в модулятор 1 , где преобразует-35 ся в соответствующий двухполярный сигнал и модулируется по амплитуде напряжением, численно равным абсолютной величине шага квантования, сформированным путем анализа входной по- 40 следовательности в формирователе 2. Модулированный импульсный сигнал интегрируется в первом интеграторе 3, на выходе которого образуется ступенчатый аппроксимирующий сигнал, являю- д щийся искаженным аналогом полезного сигнала на передающей стороне.
Рассмотрим этот сигнал в частотной области. На фиг. 2а схематически показан спектр с аппроксимирующего сиг-, нала, содержащий составляющие полезного сигнала (С) и шума квантования (Ш). По оси абсцисс отложена частота f, а П9 оси ординат - спектральная плотность 6. Поскольку спектр пгума квантования значительно шире спектра сигнала, то низкочастотная фильтрация аппроксимирующего сигнала увеличивает отношение сигнал-шум квантования
50
55
тора 9 и источника 1I на небольшую величину Uo- Напряжение разности ,iiU на выходе вычитателя 10 интегрируется в интеграторе 5 и поступает на управляющие входы фильтров 6 и 7, регулируя их частоту среза. Регулировка фильтров 6 и 7 осуществляется так, чтобы частота среза следила за точкой пересечения огибающих спектров сигнала и шума (этой точке соответствует частота f, на фиг. 2а). Для этого , сравниваются уровни внеполосной части аппроксимирующего сигнала U., и, шума квантования Uj (фиг. 26), которые при наличии слежения (в установившемся режиме) должны быть одинаковы, поскольку шум квантования распределен по оси частот сравнительно равно-; мерно. Увеличение U относительно и свидетельствует о том, что внепо- лосная часть содержит не только шум квантования, но и сам сигнал. При этом частота среза фильтров 6 и 7 увеличивается. Небольшое смешение UQ, соответствующее уменьшению частоты среза на fp, введено для обеспечения условия , в тех случаях, когда частота среза находится вьште частоты f (фиг. 2а). В этом случае частота среза фильтров 6 и 7 уменьшается. Таким образом, фактически слежение осуществляется за частотой f , незначительно сдвинутой относительно на f я .
f.
(С/Ш). Однако форма спектрального распределения сигнала меняется во времени, меняется также уровень шума квантования в зависимости от напряжения на выходе формирователя 2, поэтому целесообразно регулировать частоту среза фильтра 6 в зависимости от этих факторов. Для этого путем фильтрации
аппроксимирующего сигнала в фильтре 7, частота среза которого совпадает с частотой среза фильтра 6, получают внеполосную часть спектра, состоящую преимущественно из шума квантования
(фиг.26). Двухполупериодный выпрямитель 8 совместно с интегратором 4 вычисляют текущий уровень внеполосной части аппроксимирующего сигнала. Обозначим этот уровень через U. Уровень
шума квантования при отсутствии перегрузки прямо пропорционален напряжению Uj на выходе формирователя 2, равному шагу квантования.
Величина U. сравнивается с напряжением U , смещенным с помощью сумма0
50
0
5
тора 9 и источника 1I на небольшую величину Uo- Напряжение разности ,iiU на выходе вычитателя 10 интегрируется в интеграторе 5 и поступает на управляющие входы фильтров 6 и 7, регулируя их частоту среза. Регулировка фильтров 6 и 7 осуществляется так, чтобы частота среза следила за точкой пересечения огибающих спектров сигнала и шума (этой точке соответствует частота f, на фиг. 2а). Для этого , сравниваются уровни внеполосной части аппроксимирующего сигнала U., и, шума квантования Uj (фиг. 26), которые при наличии слежения (в установившемся режиме) должны быть одинаковы, поскольку шум квантования распределен по оси частот сравнительно равно-; мерно. Увеличение U относительно и свидетельствует о том, что внепо- лосная часть содержит не только шум квантования, но и сам сигнал. При этом частота среза фильтров 6 и 7 увеличивается. Небольшое смешение UQ, соответствующее уменьшению частоты среза на fp, введено для обеспечения условия , в тех случаях, когда частота среза находится вьште частоты f (фиг. 2а). В этом случае частота среза фильтров 6 и 7 уменьшается. Таким образом, фактически слежение осуществляется за частотой f , незначительно сдвинутой относительно на f я .
f.
О)
Фиг. 2
Фиг.З
| Патент США № 4071825, кл | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Авторское свидетельство СССР 1193820, кл | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Дельта-модуляция | |||
| Теория и при- менеиие | |||
| М.: Связь, 1976, с | |||
| Вагонный распределитель для воздушных тормозов | 1921 |
|
SU192A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
