54
со
00
ел
оо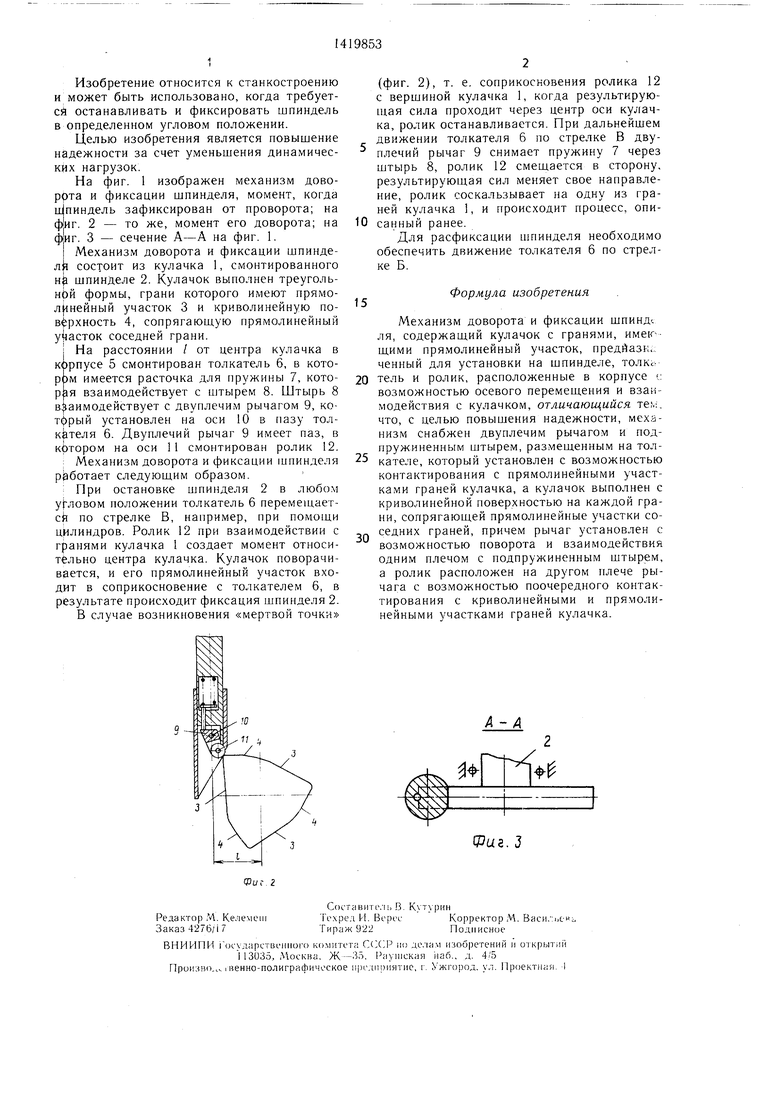
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для доворота и фиксации шпинделя в заданном угловом положении | 1976 |
|
SU650778A1 |
| Устройство для автоматической подналадки резца | 1974 |
|
SU516471A1 |
| ПОЛУАВТОМАТ ДЛЯ НАМОТКИ ЭЛЕКТРИЧЕСКИХ КАТУШЕК | 1992 |
|
RU2015586C1 |
| Манипулятор для автоматической смены инструмента | 1986 |
|
SU1404247A2 |
| Механизм доворота шпинделя | 1977 |
|
SU738827A1 |
| Устройство для подачи и поворота трубы пилигримового стана | 1985 |
|
SU1315050A1 |
| Шпиндельная бабка токарного автомата | 1983 |
|
SU1096040A1 |
| Приспособление для поворота грузонесущего органа перегрузочной тележки | 1983 |
|
SU1143668A1 |
| Устройство для доворота и фиксирования шпинделя | 1976 |
|
SU657956A1 |
| УДАРНО-ПОВОРОТНЫЙ МЕХАНИЗМ | 1996 |
|
RU2118454C1 |
Изобретение относится к станкостроению и может быть использовано, когда требуется останавливать и фиксировать шпиндель в определенно.м угловом положении. Целью изобретения является повышение надежности за счет уменьшения динамических нагрузок. При остановке шпинделя в любом угловом положении толкатель 6 перемещается по стрелке В. В случае возникновения мертвой точки, т. е. соприкосновения ролика 12 с вершиной кулачка 1, ролик останавливается. При дальнейшем движении толкателя 6 по стрелке В двуплечий рычаг 9 сжимает пружину 7 через шт1.1рь 8, ролик 12 сменхается в сторону, результирующая сил меняет свое направление, ролик соскальзывает па одну из граней кулачка 1. 3 ил.
. ;
Изобретение относится к станкостроению и может быть использовано, когда требуется останавливать и фиксировать шпиндель в определенном угловом положении.
Целью изобретения является повышение надежности за счет уменьшения динамических нагрузок.
На фиг. 1 изображен механизм дово- ррта и фиксации шпинделя, момент, когда 14пиндель зафиксирован от проворота; на . 2 - то же, момент его доворота; на фиг. 3 - сечение А-А на фиг. 1.
I Механизм доворота и фиксации шпиндели состоит из кулачка 1, смонтированного н шпинделе 2. Кулачок выполнен треуголь- нЬй формы, грани которого имеют прямолинейный участок 3 и криволинейную поверхность 4, сопрягающую прямолинейный yjiacTOK соседней грани.
На расстоянии / от центра кулачка в корпусе 5 смонтирован толкатель 6, в кото- Р|)М имеется расточка для пружины 7, которая взаимодействует с штырем 8. Штырь 8 в: аимодействует с двуплечим рычагом 9, ко- тфрый установлен на оси 10 в пазу толкателя 6. Двуплечий рычаг 9 имеет паз, в кЬтором на оси 11 смонтирован ролик 12.
(фиг. 2), т. е. соприкосновения ролика 12 с вершиной кулачка 1, когда результирую- пхая сила проходит через центр оси кулачка, ролик останавливается. При дальнейшем движении толкателя 6 по стрелке В дву плечий рычаг 9 снимает пружину 7 через штырь 8, ролик 12 смешается в сторону, результирующая сил меняет свое направление, ролик соскальзывает на одну из граней кулачка 1, и происходит процесс, опи10 санный ранее.
Для расфиксации шпинделя необходимо обеспечить движение толкателя 6 по стрелке Б.
15
Формула изобретения
Механизм доворота и фиксации шпинд.; ля, содержащий кулачок с гранями, имек-- щими прямолинейный участок, предйазк.,, ченный для установки на шпинделе, толкь 20 тель и ролик, расположенные в корпусе с: возможностью осевого перемещения и взаимодействия с кулачком, отличающийся те,.;, что, с целью повышения надежности, мех.а- низм снабжен двуплечим рычагом и подпружиненным штырем, размещенным на толМеханизм доворота и фиксации шпинделя 25 кателе, который установлен с возможностью
работает следующим образом.
При остановке шпинделя 2 в любом узловом положении толкатель б перемещает- ck по стрелке В, например, при помощи цилиндров. Ролик 12 при взаимодействии с гранями кулачка 1 создает момент относительно центра кулачка. Кулачок поворачивается, и его прямолинейный участок входит в соприкосновение с толкателем 6, в результате происходит фиксация шпинделя 2. В случае возникновения «мертвой точки
30
контактирования с прямолинейными участками граней кулачка, а кулачок выполнен с криволинейной поверхностью на каждой грани, сопрягающей прямолинейные участки соседних граней, причем рычаг установлен с возможностью поворота и взаимодействия одним плечом с подпружиненным штырем, а ролик расположен на другом плече рычага с возможностью поочередного контактирования с криволинейными и прямолинейными участками граней кулачка.
(фиг. 2), т. е. соприкосновения ролика 12 с вершиной кулачка 1, когда результирую- пхая сила проходит через центр оси кулачка, ролик останавливается. При дальнейшем движении толкателя 6 по стрелке В двуплечий рычаг 9 снимает пружину 7 через штырь 8, ролик 12 смешается в сторону, результирующая сил меняет свое направление, ролик соскальзывает на одну из граней кулачка 1, и происходит процесс, описанный ранее.
Для расфиксации шпинделя необходимо обеспечить движение толкателя 6 по стрелке Б.
15
Формула изобретения
Механизм доворота и фиксации шпинд.; ля, содержащий кулачок с гранями, имек-- щими прямолинейный участок, предйазк.,, ченный для установки на шпинделе, толкь тель и ролик, расположенные в корпусе с: возможностью осевого перемещения и взаимодействия с кулачком, отличающийся те,.;, что, с целью повышения надежности, мех.а- низм снабжен двуплечим рычагом и подпружиненным штырем, размещенным на толкателе, который установлен с возможностью
0
контактирования с прямолинейными участками граней кулачка, а кулачок выполнен с криволинейной поверхностью на каждой грани, сопрягающей прямолинейные участки соседних граней, причем рычаг установлен с возможностью поворота и взаимодействия одним плечом с подпружиненным штырем, а ролик расположен на другом плече рычага с возможностью поочередного контактирования с криволинейными и прямолинейными участками граней кулачка.
А- А
с
ГТ1
Фаг, 3
| МЕХАНИЗМ ДОВОРОТА | 0 |
|
SU330934A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
