L гою
169 f 8 Д 1 /5,
/ / / / / /
4 ГО
- ШГ
2
143
Изобретение относится к станкостроению, может найти применение в многоцелевых станках типа «Обрабатывающий центр для комплексной обработки деталей и является усовершенствованием устройства по авт. св. № 1294558.
Целью изобретения является повышение универсальности за счет обеспечения возможности обслуживания станков с различ- расположением магазина инструментов.
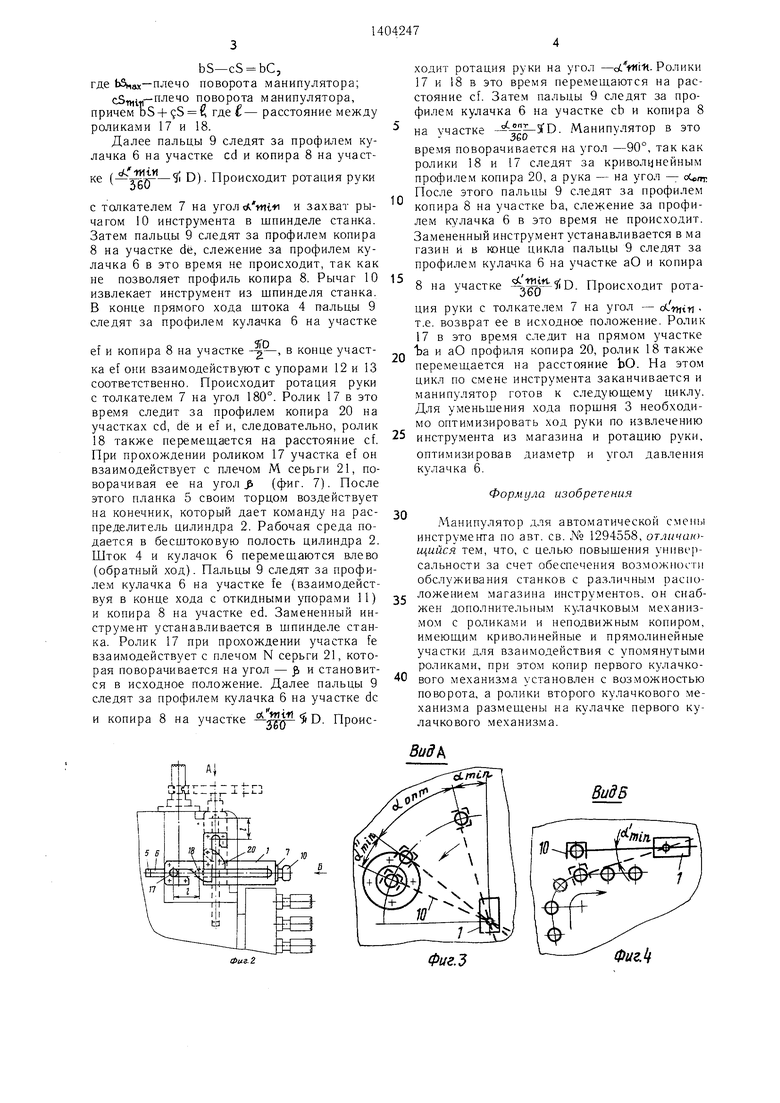
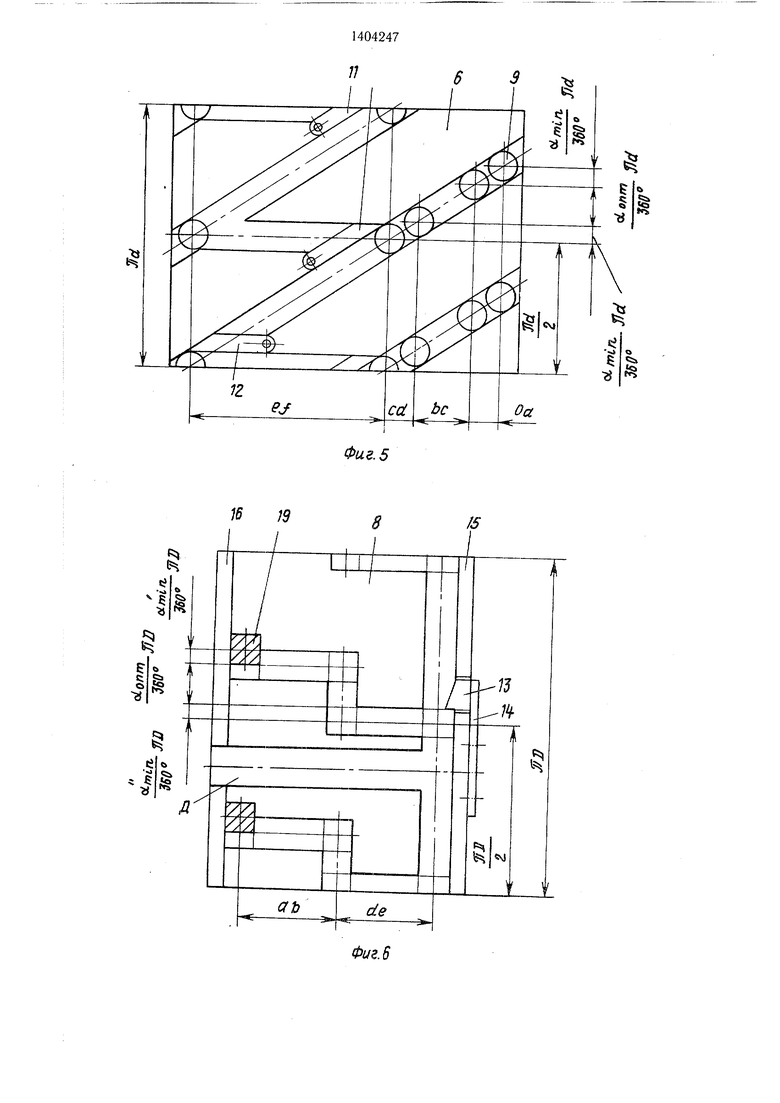
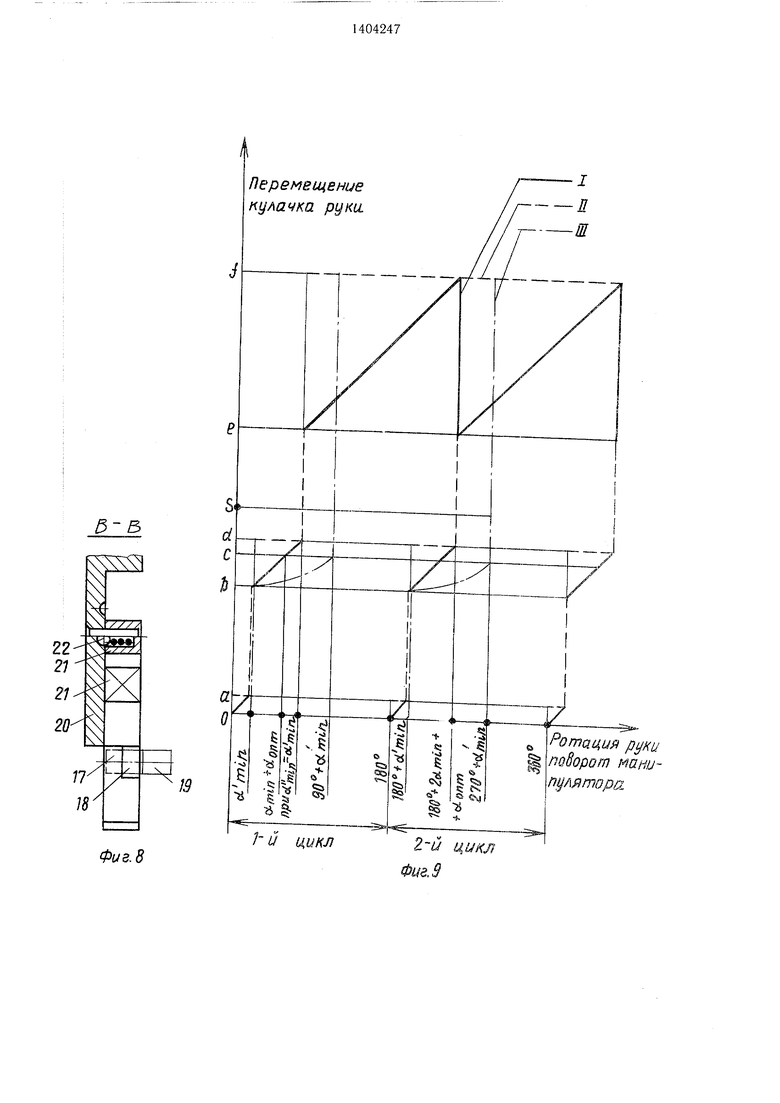
На фиг. I изображено устройство, общий вид; на фиг. 2 - то же, вид сверху; на фиг. 3 - вид А на фиг. 2; на фиг. 4 - вид Б на фиг. 2; на фиг. 5 - развертка кулачка; на фиг. 6 - развертка копира; на фиг. 7 -- дополнительный неподвижный копир; на фиг. 8 - разрез В-В на фиг. 7; на фиг. 9 - траектории перемещения пальцев и роликов; I - по кулачку, II - по копиру, П1 - по дополнительному неподвижному копиру; на фиг. 10 - алгоритм работы манипулятора.
Манипулятор состоит из корпуса 1, в котором встроен исполнительный орган, например си„1овой цилиндр 2 с поршнем 3 и штоком 4. С щтоком 4 при помопди планки 5 жестко связан кулачок 6, который имеет замкнутый профиль и расположен внутри руки с толкателем 7. Рука с толкателем 7 взаимодействует с кулачком 6 и копиром 8, жестко связанным с корпусом 1 при иомош,и пальцев 9 (по меньшей мере одного-). Для си.мметричпого распределения сил желательно иметь по л.ва пальца 9 на каждом профиле кулачка и копира. Пальцы 9 жестко закреплены на толкателе 7, в сечении оба конца одного пальца различны. С профилем кулачка 6 взаимодействует конец пальца 9 круглого сечения, а с профилем копира 8 - квадратного сечения для надежной работы толкателя 7 при граничных зонах выполнения команд ротация - выдвижение и наоборот. На конце руки с толкателем 7 имеется рычаг 10 для захвата инструмента в магазине и шпинделе станка. На кулачке 6 и копире 8 установлены упоры II -13 одностороннего действия, .минимальное количество которых может быть равно одному. Они служат для надежного слежения пальцами 9 за профилями кулачка 6 и копира 8 (фиг. 5 и 6) согласно траекториями (фиг 9). Целесообразно применять число упоров И, равное числу пальцев 9, т.е. -- два, а упоров 12 и 13 - по одному. Улоры I 1 можно установить на одной оси, так как угловой шаг между ними составляет 180°. В исходное положение упоры 11 и 12 возвращаются при помощи пружин кручения, а упор 13 - при помощи пластинчатой пружины 14. Для технологичности изготовления копир 8 со держит два кольца 15 и 16, ограничивающих его профиль с торцов, и в то же время они центрируют руку с толкателем 7. На хвостовике кулачка 6 установлены два ролика 17
0
5
0
5
0
0
f)
0
5
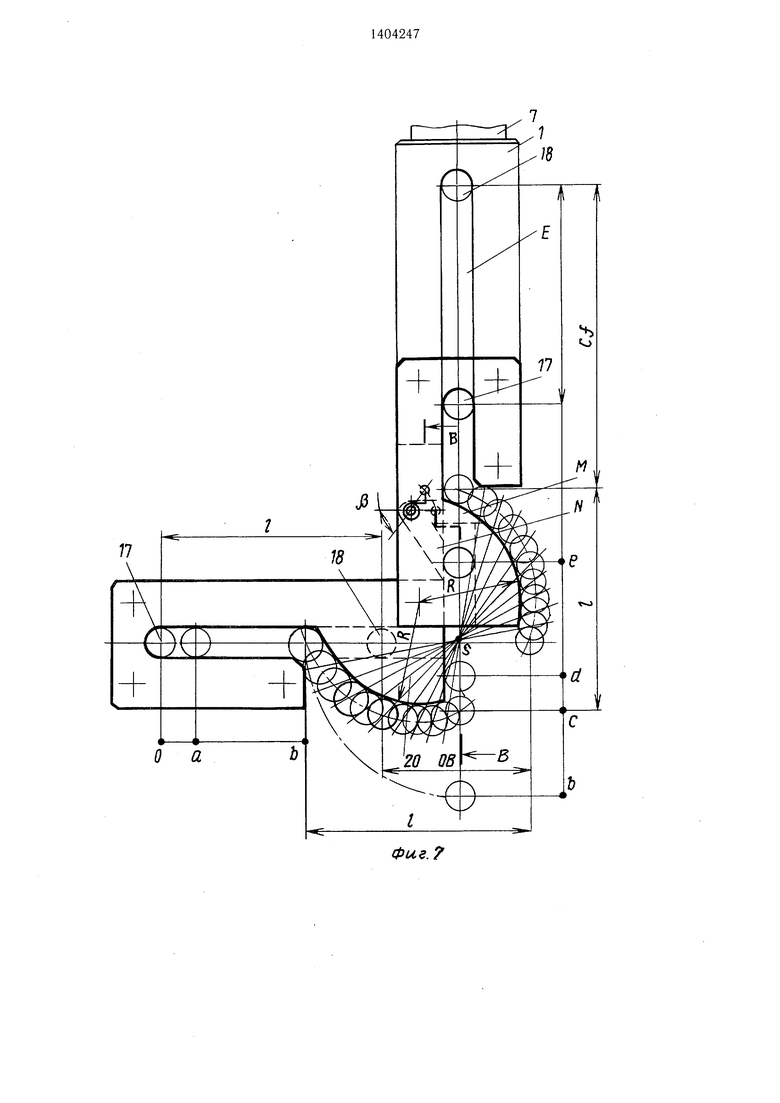
и 18 при помощи кронштейна 19 на расстоянии 6друг от друга. Ролики 17 и 18 взаимодействуют с дополнительным неподвижным копиром 20, закрепленны.м на станине станка (который для технологичности изготовления может состоять из двух частей). Цри пря.мом ходе штока 4 ведущим является ролик 17, а при обратном - ролик 18. Криволинейный профиль кулачка-копира 20 .может быть выполнен по дуге окружности радиусом R. Координаты радиуса R по отношению к прямолинейным участкам профиля определяются исходя из угла давления Д . Расстояние t между ратиками 17 и 18,зависит от величин R и Я при If const, где ф - угол подъема профиля. Неподвижный копир 20 содержит откидной фиксируемый профиль - двуплечую серьгу 21 с плечами М и iN, служащую для пропускания ролика 17 в обоих направлениях. Серьга 21 имеет пшриковый фиксатор 22, а на поверхности копира имеется два полусферических гнезда, служащих для фиксации серьги 21 в двух положениях. В корпусе 1 предус.мотрен паз Е н на копире 8 паз Д (фиг. 1) для пропускания кронштейна 19. Для переключения на реверс цилиндра 2 служит конечный выключатель 23., который срабатывает от нажатия планки 5 и дает команду на распределитель. Манипулятор установлен в станине станка шарнирно в подшипниковых опорах при помощи оси 24. Центр оси 24 - точка S (фиг. 7).
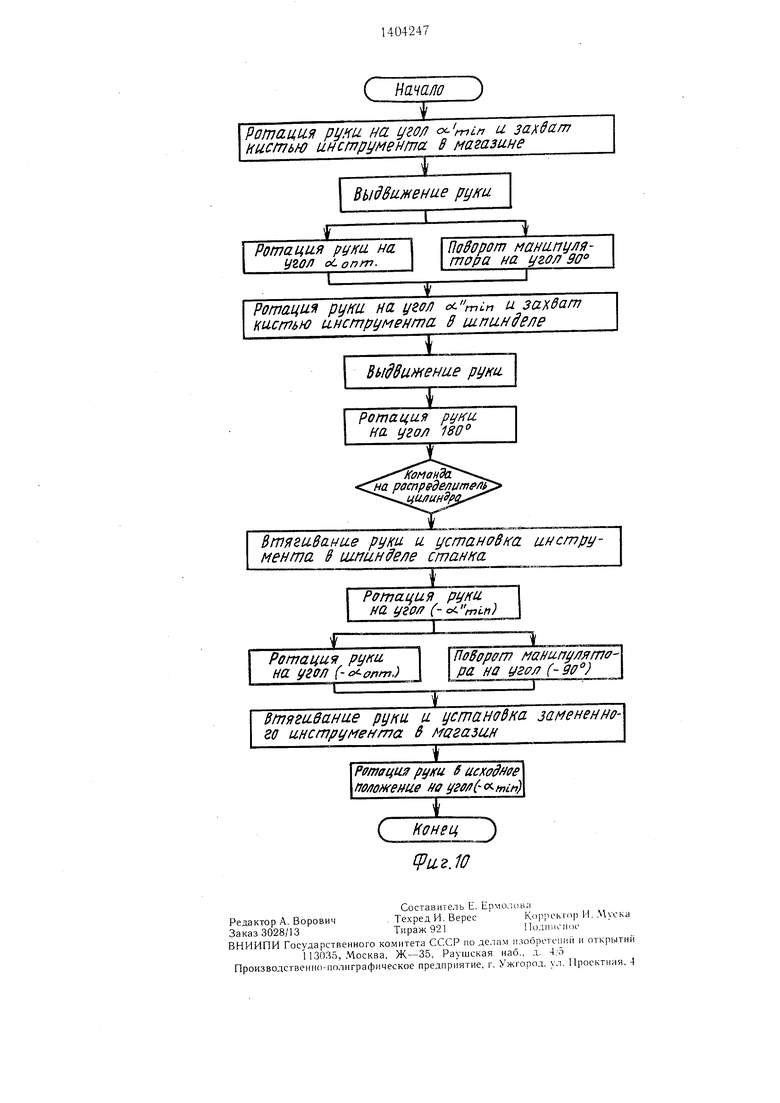
Манипулятор работает согласно алгоритму (фиг. 10).
Цри подаче рабочей среды в штоковую полость цилиндра 2 шток 4 с кулачком 6 перемещаются вправо (прямой ход). Рука с толкателем 7 и рычаго.м 10 поворачиваются на угол oi win, пальцы 9 следят одновременно за профилем к лачка 6 на участке Оа и за профилем копира 8 на участке (-iSs-S D).
«3 U L/
Цроисходит захват инструмента рычаго.м 10 в магазине станка. Цри дальнейшем перемещении штока 4 пальцы 9 следят за профилем копира 8 на участке аЬ, за профилем кулачка 6 слежение в это время не происходит, так как не позволяет профиль копира 8. Рычаг 10 извлекает инстру.мент из магазина. Ролик 17 следит за профилем копира 20 на прямом участке Оа и аЬ и, следовательно, ролик 18 также пере.мещается на расстояние ОЬ (фиг. 7). Зате.м пальцы 9 следят за профилем кулачка б на участке Ьс и копира 8 на v4acTKe
( D). Цроисходит ротация руки на
угол оСопт и поворот корпуса манипулятора на 90° Ролики 17 и 18 в это время следят за криволинейны.ми участками профиля копира 20, и кулачок 6 перемещается на расстояние, равное
bS-cS bC, где Ь3наз(-плечо поворота манипулятора;
cStMifl-плечо поворота манипулятора, причем Ь5 + 95 где t- расстояние между роликами 17 и 18.
Далее пальцы 9 следят за профилем кулачка 6 на участке cd и копира 8 на участке ( D). Происходит ротация руки
с толкателем 7 на угол cA. wi M и захват рычагом 10 инструмента в шпинделе станка. Затем пальцы 9 следят за профилем копира 8 на участке de, слежение за профилем кулачка 6 в это время не происходит, так как не позволяет профиль копира 8. Рычаг 10 извлекает инструмент из шпинделя станка. В конце прямого хода штока 4 п-альцы 9 следят за профилем кулачка 6 на участке
ef и копира 8 на участке - . в конце участка ef они взаимодействуют с упорами 12 и 13 соответственно. Происходит ротация руки с толкателем 7 на угол 180°. Ролик 17 в это время следит за профилем копира 20 на участках cd, de и ef и, следовательно, ролик 18 также перемешается на расстояние cf. При прохождении роликом 17 участка ef он взаимодействует с плечом М серьги 21, поворачивая ее на угол р (фиг. 7). После этого планка 5 своим торцом воздействует на конечник, который дает команду на распределитель цилиндра 2. Рабочая среда подается в бесштоковую полость цилиндра 2. Шток 4 и кулачок б перемещаются влево (обратный ход). Пальцы 9 следят за профилем кулачка 6 на участке fe (взаимодействуя в конце хода с откидными упорами 11) и копира 8 на участке ed. Замененный инструмент устанавливается в шпинделе станка. Ролик 17 при прохождении участка fe взаимодействует с плечом N серьги 21, которая поворачивается на угол - и становится в исходное положение. Далее пальцы 9 следят за профилем кулачка 6 на участке dc
и копира 8 на участке - D. ПроисА|
Л+Лт1 - -г f-i-,
У-РУ -н-г- - t- -Фиг. 2
ходит ротация руки на угол -oC ttfilt-Ролики 17 и 18 в это время перемешаются на расстояние cf. Затем пальцы 9 следят за профилем кулачка 6 на участке сЬ и копира 8
на участке . Манипулятор в это
JbU
время поворачивается на угол -90°, так как ролики 18 и 17 следят за криволинейным профилем копира 20, а рука - на угол - оСо,гг После этого пальцы 9 следят за профилем копира 8 на участке Ьа, слежение за профилем кулачка 6 в это время не происходит. Замененный инструмент устанавливается в ма газин и в юнце цикла пальцы 9 следят за профилем кулачка 6 на участке аО и копира
8 на участке . Происходит ротация руки с толкателем 7 на угол - т.е. возврат ее в исходное положение. Ролик 17 в это время следит на прямом участке ,. Ъа и аО профиля копира 20, ролик 18 также перемешается на расстояние ЬО. На этом цикл по смене инструмента заканчивается и манипулятор готов к следуюшему циклу. Для уменьшения хода поршня 3 необходимо оптимизировать ход руки по извлечению инструмента из магазина и ротацию руки, оптимизировав диаметр и угол давления кулачка 6.
5
Форм ила изобретения
Манипулятор для автоматической смен1 1 инструмента по авт. св. № 1294558, отличающийся тем, что, с целью повышения универсальности за счет обеспечения возможности обслуживания станков с различным распо- ложением магазина инструментов, он снабжен дополнительным кулачковым механиз- .мом с роликами и неподвижным копиром, имеющим криволинейные и прямолинейные участки для взаимодействия с упомянутыми роликами, при этом копир первого кулачкового механизма установлен с возможностью поворота, а ролики второго кулачкового механизма размещены на кулачке первого кулачкового механизма.
А
Фиг.З
Фиг.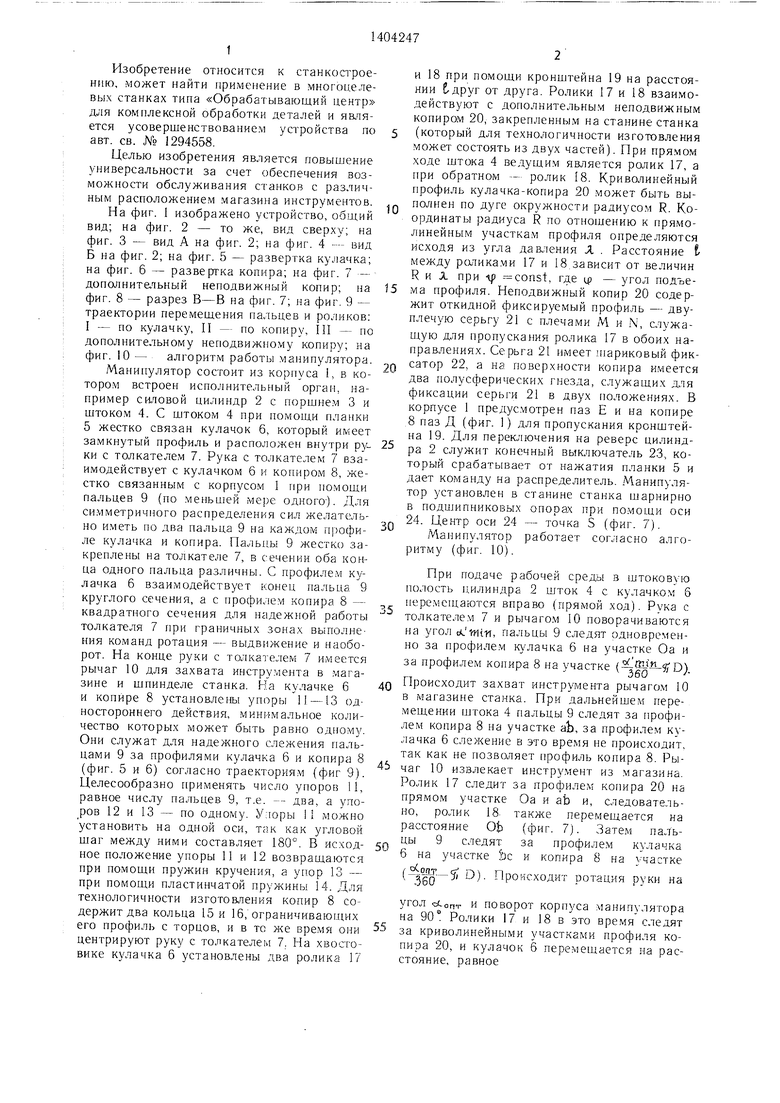
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор для автоматической смены инструмента | 1985 |
|
SU1294558A1 |
| Устройство для автоматической смены инструмента | 1986 |
|
SU1421483A1 |
| Устройство автоматической смены инструмента | 1987 |
|
SU1425032A1 |
| Манипулятор для автоматической смены инструментов | 1986 |
|
SU1393578A1 |
| Механическая рука | 1988 |
|
SU1576313A1 |
| Поворотно-делительный стол | 1984 |
|
SU1227422A2 |
| Устройство для автоматической смены инструмента | 1988 |
|
SU1708575A1 |
| Поворотно-делительный стол | 1982 |
|
SU1068263A1 |
| Устройство для автоматической смены инструментов | 1986 |
|
SU1449314A1 |
| Автооператор | 1974 |
|
SU554129A1 |
Изобретение относится к станкостроению и может применяться в многоцелевых станках типа обрабатывающего центра для комплексной обработки деталей. Цель изобретения - повышение универсальности за счет обеспечения возможности обслуживания станков с различным расположением магазина инструментов. Копир 8 манипулятора установлен на станине станка шарнирно и содержит руку с рычагом 10 для захвата инструмента в магазине и шпинделе. Перемещение руки и поворот корпуса 1 манипулятора от магазина в плоскость к шпинделю осуществляется от единого двигателя поступательного действия, например силового цилиндра 2, смонтированного в корпусе 1 манипулятора. Управление перемещением руки с рычагом 10 осуществляется кулачком, кинематически связанным со штоком 4 цилиндра 2 и копиром 8 посредством пальцев 9, установленных на руке. Управление перемещением корпуса 1 манипулятора осуществляется неподвижно закрепленным на станине станка копиром 20, с которым взаимодействуют ролики 17 и 18, смонтированные на щтоке 4. 10 ил. (Л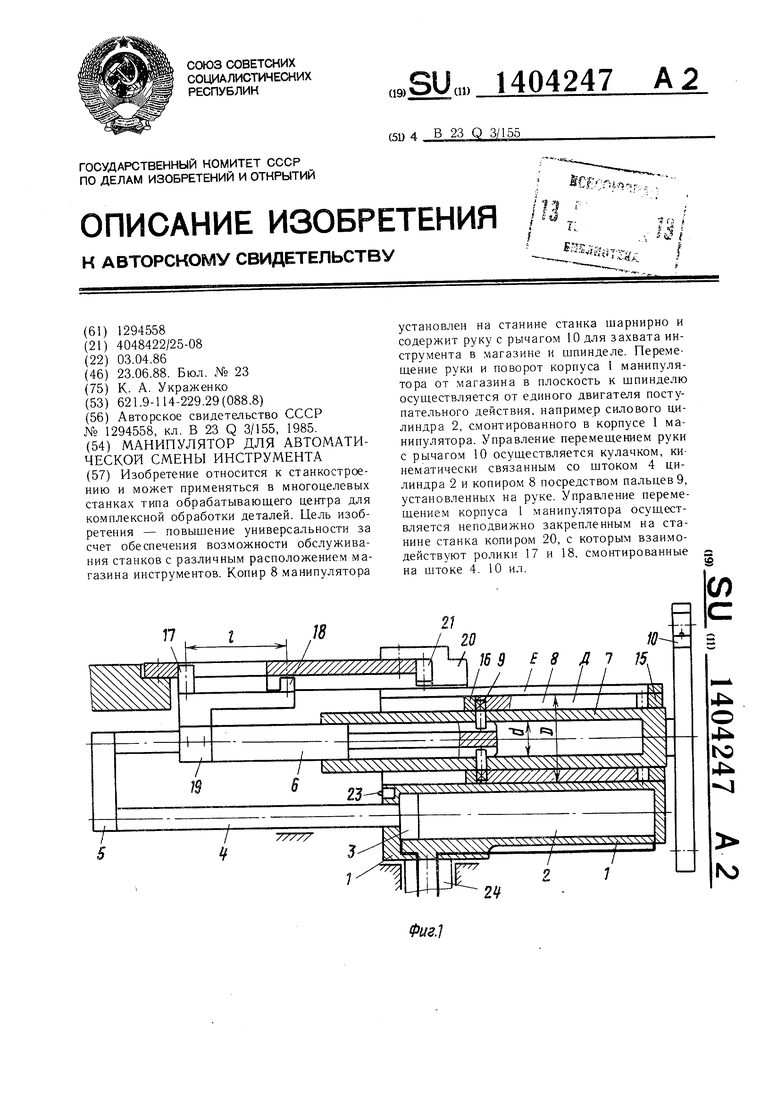
Фиг. 5
5 5
IS
Фиг.
Перемещение кулачка руки.
Б
а О
Фив. 8
J-U
цикл
.-J
цикл Фиг, 9
(Hamff
у
Ротация руни на yso/i и иистью инструмента В ма2ази.ие
I
Ротация руки на
угол oi. опт.
, т . --
Ротации рут на угол oe.min и захбат кистью инструмента. 8 шпинделе
i
Втягивание руки, и, устануб/ а инструмента ё 1ипинделе станка.
Ротации руки.
на угол (- апт.)
±
.- - -Втягивание руки, и установка замененного инструмента 6 магазин
(Hamff
у
/i а
выдвижение py/fu.
±
Поворот манипулятора на угол9о°
8ыдВи аение руки.
I
Ротаций руки, на угол 180°
манда на распр&делитеаГ, мш ин9ра
I
Ратсч ия руки.
на ysOfl ()
JL
ПоВорет мани.пулят0- ра на у га/7 (-90°)
±
L
Ротации рут S ucxodf oe поатете о угмС- х /„i/,)
| Манипулятор для автоматической смены инструмента | 1985 |
|
SU1294558A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
