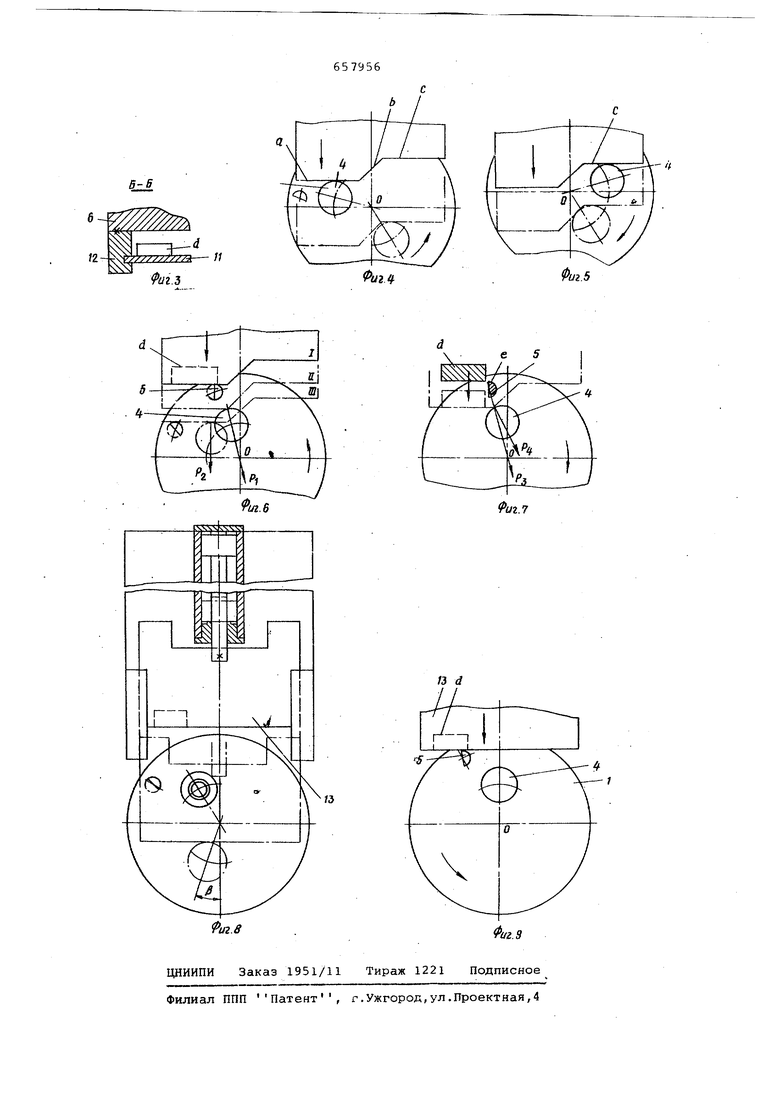
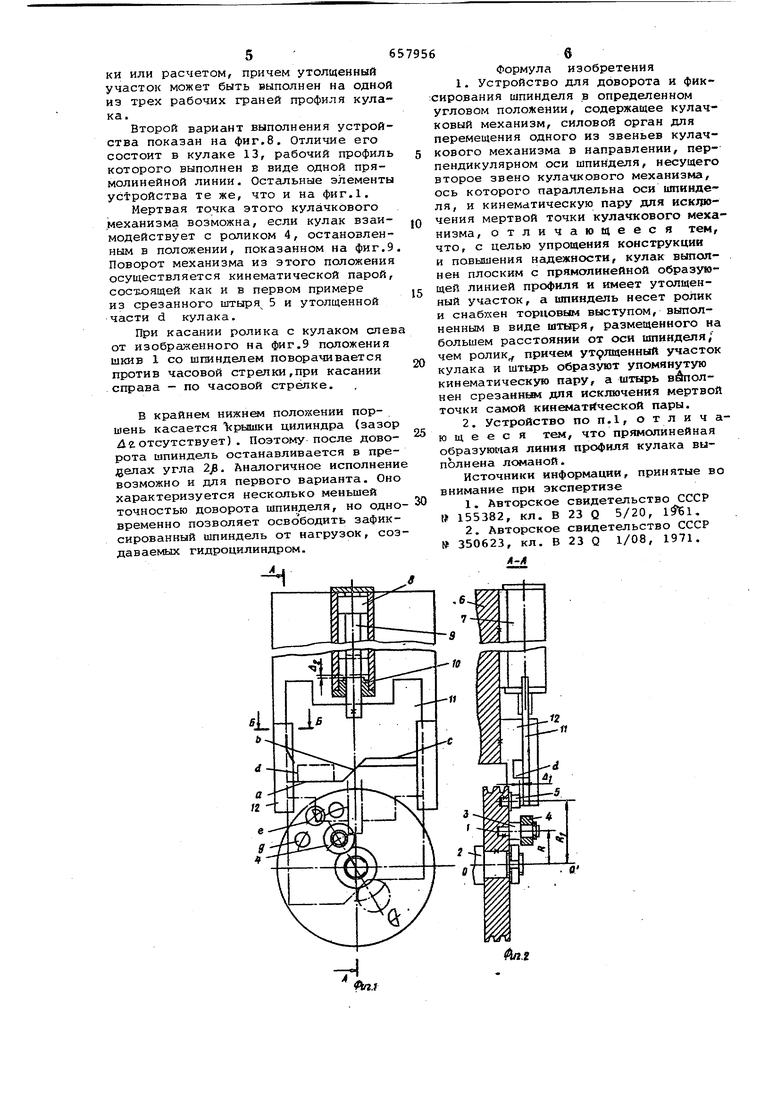
(54) УСТРОЙСТВО ДЛЯ ДОВОРОТА И ФИКСИРОВАНИЯ ШПИНДЕЛЯ стоянии от оси шпинделя, чем ролик, причем утолщенный участок кулака и штырь образуют упомянутую кинематиче кую пару, а штырь выполнен срезанным для исключения мертвой точки самой кинематической пары. Прямолинейная образующая линия профиля кулака выполнена ломаной. Па фиг.1 изображено устройство с кулаком, прямолинейная направляющая линия которого выполнена ломаной (вариант 1); на фиг.2 - разрез . на фиг.1; на фиг.З - разрез Б-Б на фиг.1; на фиг.4-7 - различные моменты работы устройства (вариант 1) на фиг.8 показано устройство с кулаком прямолинейная направляющая линия которого выполнена прямой (вариант 2 на фиг.9 - момент работы устройства (вариант 2). На наружном торце шкива 1, закреп ленного на шпинделе 2, установлена ось 3, параллельная оси О-Ошпиндел и несущая ролик 4. Расстояние между осями шпинделя и ролика равно R. На радиусе на шкиве 1 расположен торцовый выступ 5, выполненный в вид штыря. На корпусе 6 шпиндельного узла установлен гидроцилиндр 7 с поршнем шток 9 которого Перпендикулярен оси шпинделя,2 и направляется крышкой 10.С штоком связан плоский кулак 11,расположенный в направляющих 12 закрепленных на корпусе б. Образующая линия профиля кулака может быть выполнена в виде ломаной линии йЬс. На грани с образующей (L имеется утолщенный участок d профил кулака, обращенный к шкиву 1. Высота торцового выступа 5 меньше расстояния между наружным торцом шкива 1 и обращенной к нему стороно плоского кулака 11.. Таким образом, торцовый выступ 5 может взаимодейст вовать только с утолщенным участком d кулака, так как меходу остгшьной частью кулака и торцовым выступом имеется зазорA.. Кулак 11 и ролик 4 образуют .кулачковый механизм устройства, утолщенный участок профиля кулака и тор цовый выступ 5 представляют собой кинематическую пару для исключения мертвой точки кулачкового механизма В свою очередь мертвая точка этой кинематическойПары исключена срезо е на штыре (выступе) 5. Балансировка шкива 1, нарушенна осью 3, роликом 4 и штырем 5, восстановлена двумя отверстиями д. Работает устройство следующим образом. В исходном положении давление пЬ ключено к штоковой полости гидроцилиндра 7, кулак 11 находится вне траектории ролика 4 и выступа 5, вр щающихся совместно со шпинделем. По 4 ле выключения вращения и остановки шпинделя в произвольном угловом положении давление подключается к поршневой полости гидроцилиндра, в результате чего шток 9 перемещает кулак 11 вниз. При этом грани кулака взаимодействуют с роликом 4, занимающим произвольное угловое положение. Если при ходе кулака вниз ролик 4 оказался на пути грани с образующей U (см.фиг.4), то ролик контактирует с этой гранью, а затем с гранью с образующей Ь. Шпиндель доворачивается против часовой стрелки до углового положения, в котором ролик заключен в ловителе (это положение устройства изобрахсено на фиг.1 и 4 штрих-пунктипными линиями) . Зазор 4г. между поршнем 8 и крышкой 10 гарантирует точную фиксацию ролика ловителем. Если встреча ролика с кулаком произошла на гранях с образующими b или с, то шпиндель доворачивается по часовой стрелке до того же углового положения (см.фиг.5). Мертвая точка кулачкового механизма, состоящего из кулака 11 и ролика 4, возможна, когда с роликом контактирует линия пересечения граней с образующими а и Ь, а нормальная сила давления P/i на ролик проходит через ось шпинделя. Это положение II, (см.фиг.6) исключено торцовым в аступом 5, который взаимодействует только с утолщенным участком d в зоне, когда возможна мертвая точка механизма, и поворачивает шпиндель из положения Г в положение III, Последнее положение характерно тем, что кинематическая пара еще взаимодействует, а кулачковый механизм начинает работать, причем нормальная сила давления Pg на ролик не проходит через центр О, создавая крутящий момент, поворачивающий шпиндель Против часовой стрелки. Таким образом, в результате работы кинематической пары шпиндель поворачивается на некоторый угол, минуя зону мертвой точки кулачкового механизма. Мертвая точка кинематической пары возможна, когда с круглой поверхностью штыря 5 контактирует угол утолщенной части d, а нормальная сила давления Рд на штырь проходит через центр О (см.фиг.7). Это положение исключено срезом е-,, позволяющим кулаку свободно пройти до позиции, в которой начинает взаимодействовать кулачковый механизм, вызывающий силу давления Рд ,проходящую мимо центра 0. Перед включением вращения шпинделя давление подается в штоковую полость гидроцилиндра 7, вследствие чего ку- лак отводится в исходное положение. Размеры устройства, в.частности, взаимное положение ролика, торцового выступа, среза на нем и утолщенного участка кулака определяется- графически или расчетом, причем утолщенный участок может быть выполнен на одной из трех рабочих граней профиля кулака. Второй вариант выполнения устройства показан на фиг,8. Отличие его состоит в кулаке 13, рабочий профиль которого выполнен в виде одной прямолинейной линии. Остальные элементы устройства те же, что и на фиг.1. Мертвая точка этого кулачкового механизма возможна, если кулак взаимодействует с роликом 4, остановленным в положении, показанном на фиг.9 Поворот механизма из этого положения осуществляется кинематической парой, состоящей как и в первом примере из срезанного штыря 5 и утолщенной части d кулака. При касании ролика с кулаком слев от изображенного на фиг.9 положения шкив 1 со шпинделем поворачивается против часовой стрелки,при касании справа - по часовой стрелке. В крайнем нижнетч поло хении поршень касается Крышки цилиндра (зазор Д г отсутствует). Поэтому после доворота шпиндель останавливается в пределах угла 2JB. Аналогичное исполнени возможно и для первого варианта. Оно характеризуется несколько меньшей точностью доворота шпинделя, но одно временно позволяет освободить зафиксированный шпиндель от нагрузок, соз даваемых гидроцилиндром. Формула изобретения 1.Устройство для доворота и фиксирования шпинделя в определенном угловом положении, содержащее кулачковый механизм, силовой орган для перемещения одного из звеньев кулачкового механизма в направлении, перпендикулярном оси шпинделя, несущего второе звено кулачкового механизма, ось которого параллельна оси шпинделя, и кинематическую пару для исключения мертвой точки кулачкового меканизма, отличающееся тем, что, с целью упрощения конструкции и повышения надежности, кулак выполнен плоским с прямолинейной образующей линией профиля и имеет утолщенный участок, а шпиндель несет ролик и снабжен торцовым выступом, выполненным в виде штыря, размещенного на большем расстоянии от оси шпинделя; чем ролик причем ут9лщенный участок кулака и штырь образуют упомянутую кинематическую пару, а штырь выполнен срезанным для исключения мертвой точки самой кинематической пары. 2.Устройство по П.1, о тл и ч аю щ е е с я тем, что прямолинейная образующая линия профиля кулака выполнена ломаной. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР 155382, кл. В 23 Q 5/20, , 2.Авторское свидетельство СССР № 350623, кл. В 23 Q 1/08, 1971.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для фиксированного останова шпинделя | 1980 |
|
SU994206A1 |
| Механизм доворота и фиксации шпинделя | 1986 |
|
SU1419853A1 |
| Многопозиционный автомат для обработки изделий типа корпуса наручных часов | 1957 |
|
SU117374A1 |
| Механизм доворота шпинделя | 1974 |
|
SU546433A1 |
| Устройство для автоматической подналадки резца | 1974 |
|
SU516471A1 |
| УСТРОЙСТВО ДЛЯ АБРАЗИВНОЙ ОБРАБОТКИ С КРУТИЛЬНО-ОСЕВЫМИ ВИБРАЦИЯМИ | 1999 |
|
RU2164853C1 |
| Автомат для мерной резки проволоки | 1983 |
|
SU1169783A1 |
| Станок для обработки наружных многогранных поверхностей деталей | 1986 |
|
SU1516259A1 |
| Монтажный узел с распорным анкером и монтажным инструментом для закрепления распорного анкера в отверстии с расширением в донной части | 1990 |
|
SU1827343A3 |
| Автомат навивки капиллярных труб | 1987 |
|
SU1447500A1 |