О
f
3 7
i
СЛ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для захвата мягких деталей | 1990 |
|
SU1713875A1 |
| Захватное устройство для мягких деталей | 1991 |
|
SU1779583A1 |
| Вакуумное захватное устройство | 1990 |
|
SU1776558A1 |
| Схват робота | 1987 |
|
SU1502299A1 |
| Схват | 1979 |
|
SU837922A1 |
| Захватное устройство для мягких деталей | 1990 |
|
SU1811482A3 |
| СХВАТ | 1991 |
|
RU2028269C1 |
| Устройство для отделения и захвата мягких деталей от пачки | 1988 |
|
SU1570982A1 |
| Вакуумный схват | 1980 |
|
SU891429A1 |
| Захват для текстильных заготовок | 1990 |
|
SU1733360A1 |
Изобретение может быть использовано в качестве захватного органа манипуляторов в легкой промышленности. Целью изобретения является повышение надежности в работе. При опускании устройства мембрана 7 входит в контакт с верхней деталью и принимает плоское положение, иглы 8 при этом вкалываются в деталь и одновременно поворачиваются в сторону геометрического центра мембраны. Обратный клапан 3 закрывает доступ воздуха в полость 11 корпуса 1, и создавшееся разрежение удерживает жидкость 12 на верхнем уровне, а мембрану 7- в плоском положении у торца корпуса 1 . 4 ил.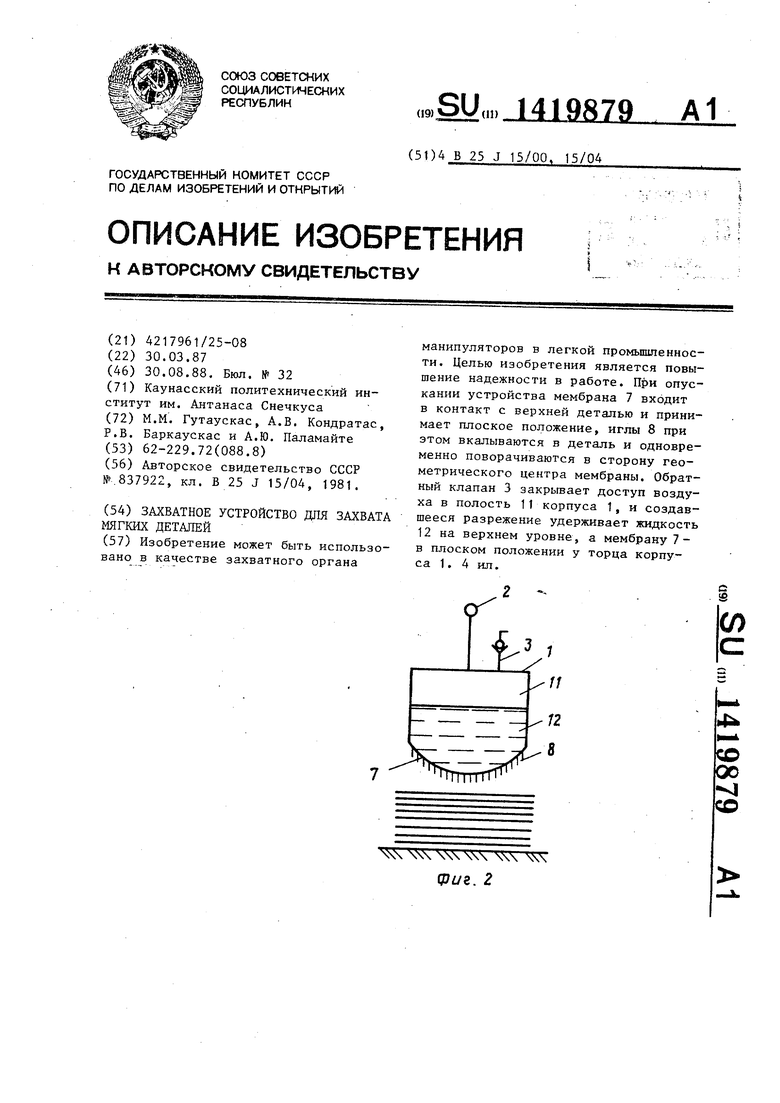
со
СХ)
со
XsN ХЧ N
Фи. 2
1 1
Изобретение относится к средствам г втоматизации погру з очно-раз груз оч- Ньк работ и может быть использовано В качестве захватного органа промышленных роботов и манипуляторов в лег ой промышленности.
Целью иэдбретения является повышение надежности работы.
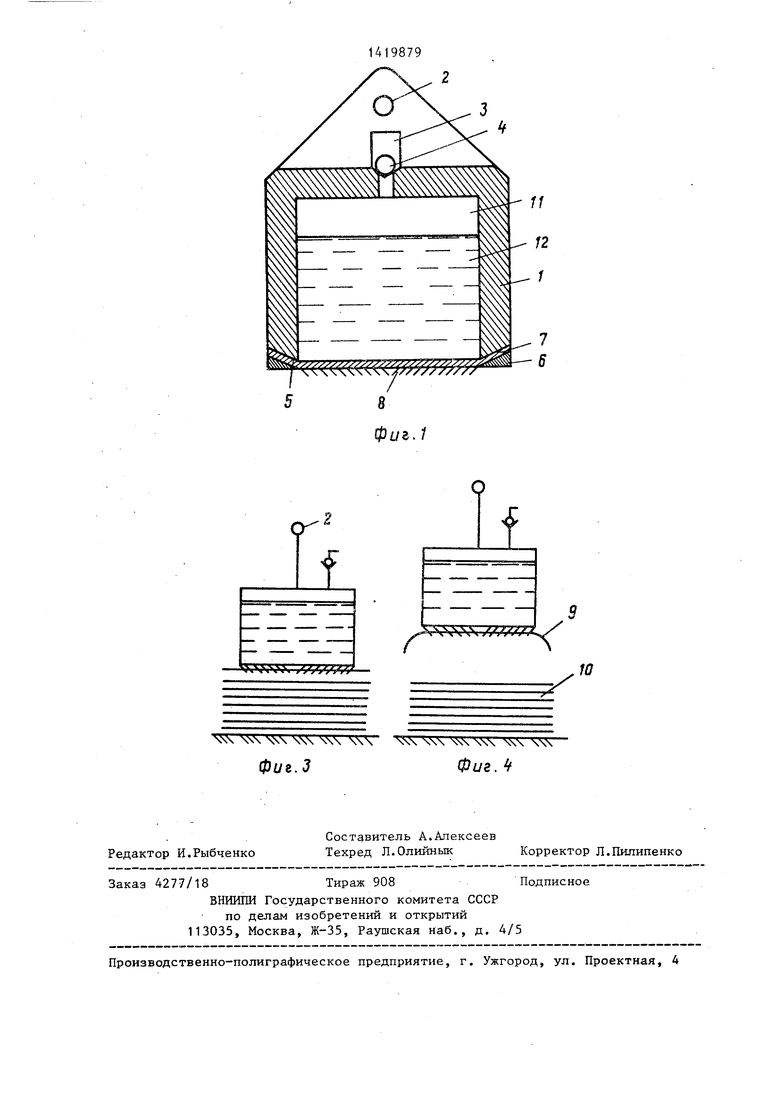
На фиг, 1 показано устройство, рбщий вид; на фиг. 2 - то же, в ис- |содном положении; на фиг. 3 - тоже, Ьри захвате детали; на фиг. 4 - то е, при отделении детали от стопы, I Захватное устройство содержит вер гикальный стаканообразный корпус 1 Кфиг. 1)- с шарниром 2 для присоедине |ния к руке робота или манипулятора 1(не показан) и обратным клапаном 3, Ьарик 4 которого соединен с узлом |механического управления (не пока- |зан). Нижний открытый торец 5 корпу- |са 1 закрыт посредством крепежного элемента 6 эластичной мембраной 7 с :полем наклоненных в сторону геометри :ческой оси корпуса 1 микроигл 8, об- Iращенных в сторону захватываемой де i тали 9, лежащей на пакете 10. Внут- ренняя полость 1t корпуса 1 частично заполнена текучей средой 12, например жидкостью или сыпучим материалом
Устройство работает следующим-образом.
Через шарнир 2 посредством руки ,робота или манипулятора, устройство совершает вертикальное возвратно-по- ; ступательное и поворотное перемещение. При этом оно захватывает плоскую деталь 9, отделяет ее от пачки 10, переносит в нужном направлении и сбрасывает.
В исходном положении (фиг. 2) устройство находится вьш1е пачки 10 деталей 9. Текущая среда 12, находящаяся во внутренней полости 11 корпуса 1, под действием силы тяжести прогибает мембрану 7. Иглы 8, размещенные на нижней поверхности мембраны 7, ориентируются вниз.
При опускании устройства мембрана 7 приближается к пачке 10 и входит в
792
контакт с верхней деталью 9. При этом мембрана 7 принимает плоское роложение, иглы 8 вкалываются в деталь 9 и.одновременно: поворачиваются в сторону геометрического центра мембраны. В результате деталь 9 прочно надевается на иглы 8 мембраны 7. При распрямлении мембраны уровень
текучей среды 12 в полости 11 корпуса 1 поднимается, а воздух, находящийся над текучей средой 12, выжимается из Полости корпуса 1 через обратный клапан 3, приподнимая шарик 4.
Затем следует подъем и перенос устройства. Обратньй клапан 3 шариком 4 закрывает доступ воздуха из
наружной среды в полость 11 корпуса 1. Поэтому при подъеме в полости корпуса 1 создается разрежение, которое удерживает текучую среду 12 на верхнем уровне, а мембрану 7 и
деталь 9 - в плоском положении около торца 5 корпуса 1.
После переноса детали принудительно открывается обратный клапан 3
(например, путем механического задевания крайнего ограничителя, входящего в систему управления роботом или манипулятором). Разрежение в полости 11 исчезает. Текучая, среда 12, опускаясь, выгибает мембрану 7,
иглы 8 вытягиваются из тела детали 9, и деталь высвобождается. На этом цикл работы устройства завершается.
40
Формула изобретения
Захватное устройство для захвата мягких деталей, содержащее полый корпус, закрытый снизу мембраной с иглами, наклоненными к центру мембраны, отличающееся тем, что, с целью повьш1ения надежности работы, полость корпуса заполнена текучей средой и соединена с атмосферой посредством управляемого
клапана.
7
6
са
ив
О
U .-,-Ti. I 1 ЦЧ1--
9
,,ii I
NN N4 NNX ЧЧЧ ЧЧЧ ЧЧЧ ЧЧЧ
фиг.ЗФиг.
Составитель А.Алексеев Редактор И.Рыбченко Техред Л.Олийнык Корректор Л.Пилипенко
Заказ 4277/18Тираж 908Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Схват | 1979 |
|
SU837922A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
