Изобретение относится к элементам подъемно-транспортных и роботизированных систем, предназначенных для отделения и последующего переноса плоских мягких изделий типа тканей, трикотажных полот;ен, и мржет найти применение в швейной, обувной и трикотажной промышленности.
Целью изобретения является упрощение конструкции и повышение надежности захвата и переноса мягких деталей.
Указанная цель достигается тем, что в устройстве для захвата мягких , содержащем корпус с полостью, нижняя стенка которого представляет собой эластичную мембрану с иглами для захвата деталей, установленных с наклоном к вертикальной оси корпуса, ферромагнитную текучую среду, размещенную в полости корпуса с образованием зазора с его верхней стенкой, верхняя часть корпуса имеет дополнительную полость, соединенную с основной, и электромагнитную катушку, охватывающую боковые стенки дополнительной полости.
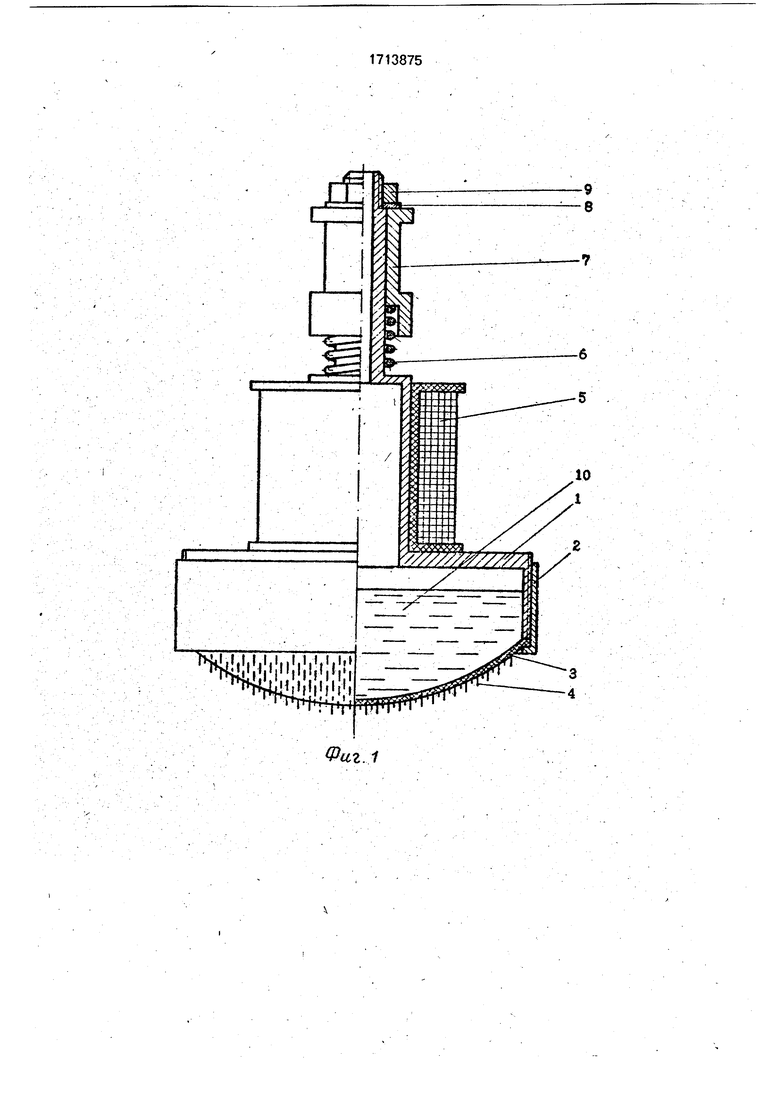
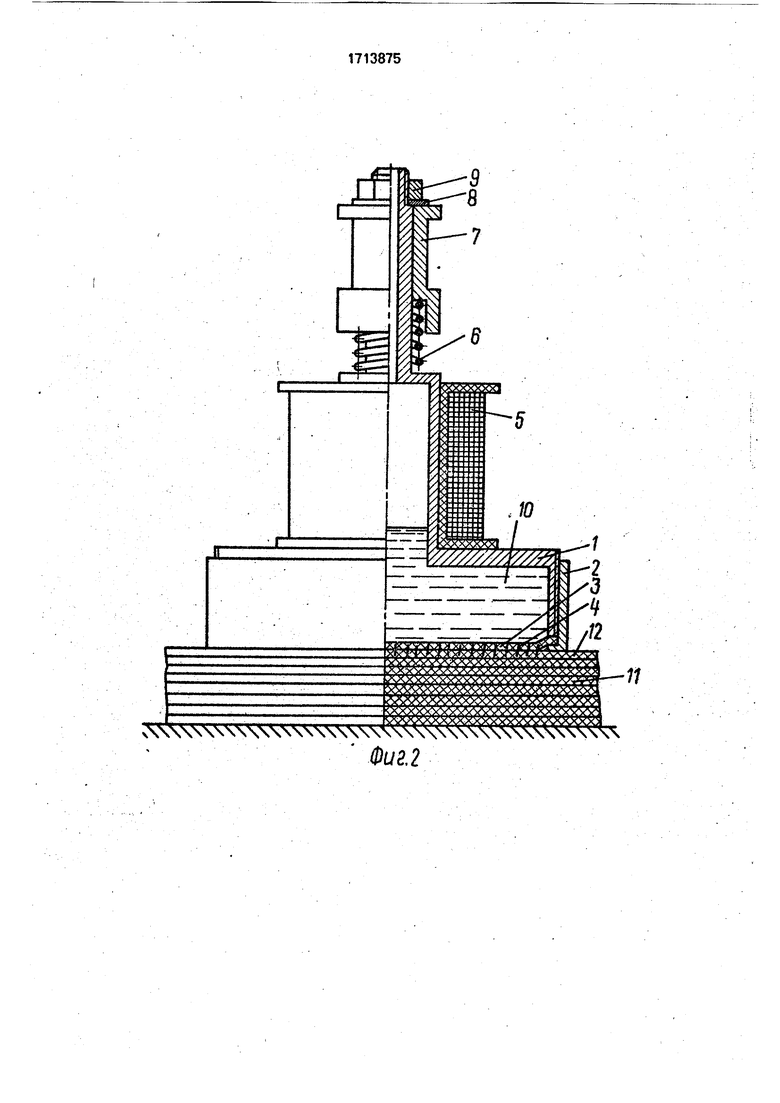
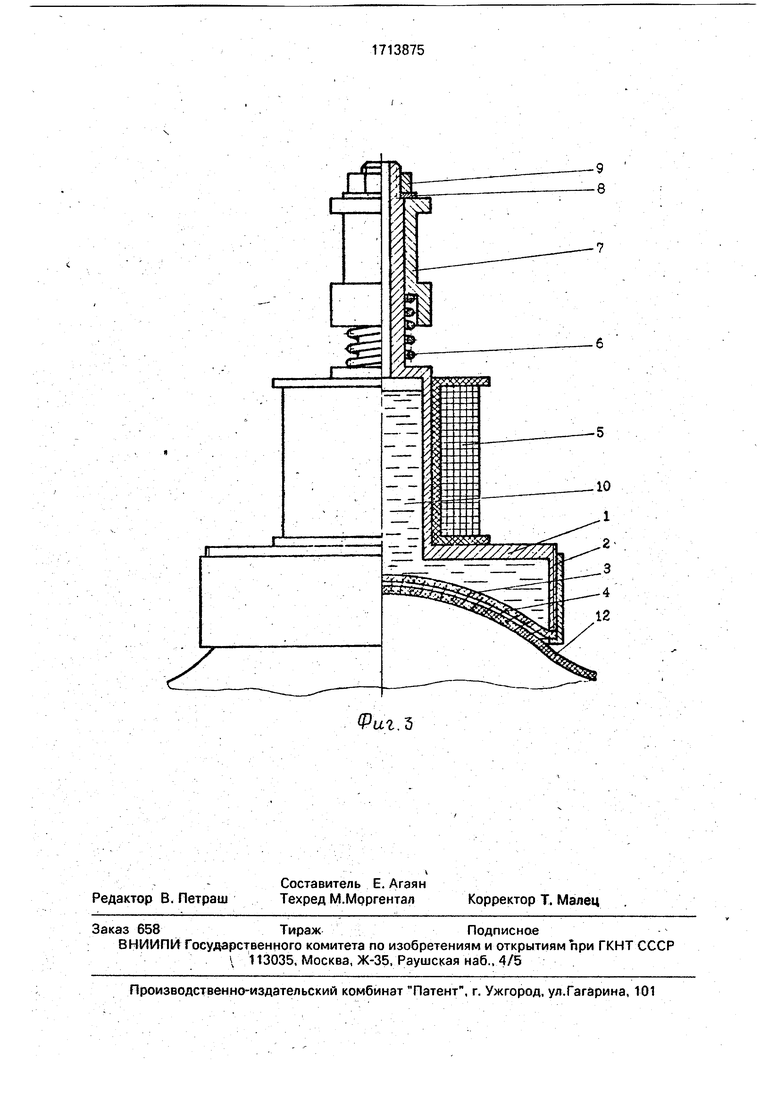
На фиг.1 представлено предлагаемое устройство, общий вид, в исходном положении, на фиг,2 - то же, в момент останова над стопой отделяемых деталей; на фиг.З - то же, в момент переноса захваченной детали.
Устройство содержит полый корпус 1, на нижней торцовой части которого посредством кольца 2 закреплена эластичная мембрана 3, покрытая полем наклоненных в сторону геометрической оси устройства и обращенных в сторону захватываемой детали игл 4, а на верхней части этого корпуса, t выполненной с дополнительной полостью, соединенной с основной полостью корпуса.
закреплена электромагнитная катушка 5 и надета компенсационная пружина 6. втулка 7 и ограничительная шайба 8, закрепленная га(кой 9, причем в основной полости корпуса размещена ферромагнитная текучая среда 10 с образованием зазора со стенкой корпуса этого устройства. Корпус устройства выполнен из немагнитного материала.
Для работы устройство фиксируется за втулку 7 в вертикальном положении в схвате. промышленного манипулятора (не показан). ,
В исходном положении устройства текучая ферромагнитная среда 10, находящаяся в основной полости корпуса 1, под действием силы тяжести прогибает мембрану 3 так, что иглы 4, размещенные на нижней поверхности мембраны 3, ориентируются вниз (фиг. 1).
Устройство работае:т следующим образом;
При опускании устройства на стопу мягких деталей 11 в контакт с верхней деталью 12 входят иглы 4, внедряются в нее и при распрямлении эластичной мембраны 3 поворачиваются в сторону геометрической оси устройства. При распрямлении мембраНЬ1 уровень текучей ферромагнитной среды 10 8 основной полости корпуса 1 поднимается, вследствие чего текучая ферромагнитная среда переходит в дополнительную полость корпуса, образующую сердечник электромагнитной катушки 5, и частично ее заполняет (фиг.2).
После этого включается ток, протекающий по обмотке электромагнитной катушки 5. магнитное поле которой, воздействуя на текучую ферромагнитную среду 10 втягивает ее в дополнительную полость корпуса, образующую сердечник электромагнитной катушки 5, и перемещает эту текучую ферромагнитную среду внутри корпуса 1 вверх. Это перемещение текучей (ферромагнитной) среды вызывает прогиб эластичной мембраны 3 внутрь корпуса 1 и еще больший поворот игл 4, внедренных в верхнюю деталь 12 стопы 11, а также частичное отделение этой детали от стопы.
Затем следует подъем и перенос (гстройства с захваченной деталью в заданное место (фиг.З). После переноса детали включается ток, протекающий по обмотке электромагнитной катушки 5, исчезает ее магнитное поле w текучая ферромагнитная среда 10, опускаясь под действием силы тяжести, выбигает эластичную мембрану 3, возвращая ее в исходное положение, иглы 4 вытягиваются из перенесенной детали, вследствие чего она высвобождается. После сброса перенесенной детали устройство
возвращается в исходное положение и цикл повторяется.
При изменении толщины отделяемых деталей могут быть применены мембраны с соответствующей высотой игл.
Формула изобретения Устройство для захвата мягких деталей, содержащее корпус с полостью, нижняя стенка которого представляет собой эластичную мембрану с игяаГми для захвата деталей, уста но в л е н н ы ми сна клон ом к вертикальной оси корпуса, ферромагнитную текучую среду.размещенную в полости корпуса с образованием зазора с его верхней стенкой,отличающееся тем,что, с целью упрощения конструкции и повышения надежности захвата деталей, верхняя часть корпуса имеет дополнительную полость, соединенную с основной, и электромагнитную катуш ку, охватывающую боковй1е стенки дополншельной полости.
Фиг.1
ХХХ)рСОЛЛ У Л|РУ)
,Х
Фиг.2
.10 .1
S4vse 4 ya
,2 ////// ///Л .3 -4 12
(Риг.Ъ
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство для захвата мягких деталей | 1987 |
|
SU1419879A1 |
| Захватное устройство для мягких деталей | 1991 |
|
SU1779583A1 |
| Захватное устройство для мягких деталей | 1990 |
|
SU1811482A3 |
| Устройство для отделения детали от пачки | 1986 |
|
SU1359231A1 |
| Устройство для захвата мягких деталей | 1989 |
|
SU1742189A1 |
| Вакуумный захват для листовых деталей | 1988 |
|
SU1640084A1 |
| Губка захвата для хрупких деталей | 1982 |
|
SU1060467A1 |
| ГИДРОСИСТЕМА ЭЛЕКТРОКАПЛЕСТРУЙНОГО ПРИНТЕРА И ЕЕ ЭЛЕМЕНТЫ | 2002 |
|
RU2212633C1 |
| СХВАТ | 1991 |
|
RU2028269C1 |
| Импульсный электромагнитный клапан (варианты) | 2021 |
|
RU2778999C1 |
Изобретение относится к элементам подъемно-транспортных и роботизированных систем, предназначенных для отделения и последующего переноса плоских мйгких изделий, позволяет упростить конструкцию и повысить надежность захвата мягких изделий. Устройство для захвата мягких деталей содержит корпус с полостью, нижняя стенка которого представляет собой зластичную мембрану с иглами для захвата деталей, установленных с наклоном к вертикальной оси корпуса. Устройство также содержит ферромагнитную текучую среду, размещенную в полости корпуса с образованием зазора с его стенкой. Над полостью)корпуса устройства размещена дополнительная полость, соединенная с основной, и электромагнитная катушка, охватывающая стенки дополнительной полости. Размещение ферромагнитной среды без давления и с зазором относительно стенок корпуса позволяет повысить сроки службы, исключить герметизацию устройства, обеспечить воз-• можность поворота игл к оси. что позволяет надежней захватывать детали большого веса, 3 ил.
| Захватное устройство для захвата мягких деталей | 1987 |
|
SU1419879A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
