« /7 5И OfSJJf 9 / / / /
1
// ; К- 8 /5 5
Изобретение относится к станкам я обработки стволов деревьев, преи- 1-|ущвственно к роторным окорочным йтанкаМ| и может быть использовано В лесной и деревообрабатываняцей про- мьшшенности.
Целью изобретения является повышение качества обработки за счет увеличения точности центрирования ство- jjia.
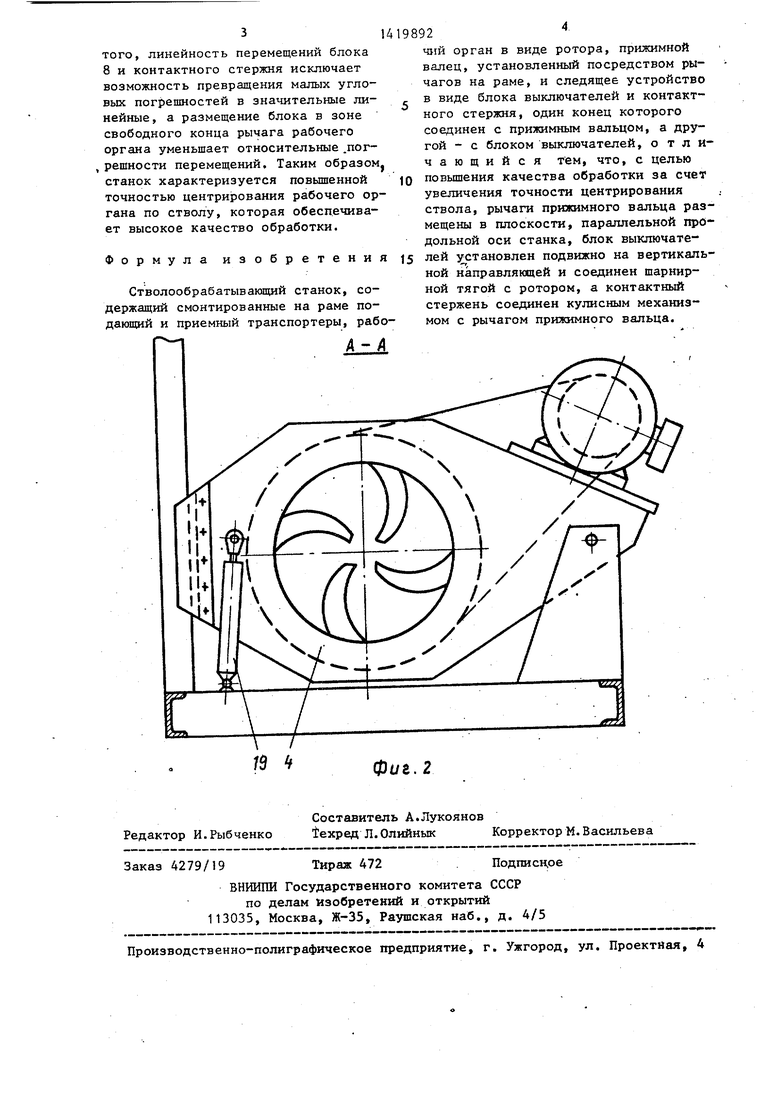
I На фиг,1 показан станок, общий ид; fta фиг.2 - раэрез А-А на фиг.1. I Станок содержит смонтированные на )аме 1 подающий 2 и приемный 3 транс- Ьортеры, рабочий орган в виде ротора |4, прижимной валец 5, установленный |посредством рычагов 6 и 7 на раме 1 и следящее устройство в виде блока 8 клключателей и контактного стержня 9. Рычаги 6 и 7 вальца 5 размещены в . плоскости, параллельной продольной оси 0-0 станка, блок 8 выключателей установлен подвижно на вертикальной направляющей 10 и соединен шарнирной тягой И с ротором 4. Стержень 9 соединен с рычагом 7 с помощью кулисного механизма 12. Валец 5 имеет привод в виде гидроцилиндра 13 для перемещения в вертикальной плоскости. Блок 8 снабжен выключателями 14 и 15 подъема и 16 и 17 опускания ротора 4. Сектор 18 на конце стержня .9 перекрывает выключатели 14 и 15 при расположении блока 8 ниже свободного конца стержня 9 и выключатели 16 и 17 при обра тмом наклоне стержня 9. Геометри- размеры рычагов 6 и 7 и точка крёплейия тяги 11 на роторе 4 выбраны такими, чтобы вертикальное пере- мещение вальца 5 в два раза превьшало перемещение центра ротора 4 при горизонтальном расположении стержня 9. Дпя вертикальных перемещений ротора 4 предназначен силовой циливдр 19.
Станок снабжен также системой автоматического управления -и гидравлической системой известного типа.
Станок работает следующим образом
До подачи первого ствола прижим- , ной валец 5 и ротор 4 опущены в крайнее нижнее положение, при зтом центр ротора находится на оси 0-0 станка, цилиндр 19 ротора и цилиндр 13 вальца 5 находятся в плавающем состоянии блок 8 установлен в положение, при котором контактный стержень 9 горизонтален и сектор 18 не перекрывает ни один из выключателей 14-17. При
0
5
0
0
5 0 5
0 5
подаче ствола валец 5 выходит на его поверхность, в цилиндр 13 подается рабочая жидкость и осуществляется прижим ствола. При этом рычаги 6 и 7 поворачиваются в вертикальной плоскости, параллельной оси 0-0, т.е. вертикальное перемещение вальца 5 равно диаметру ствола. Стержень 9 наклоняется, и сектор 18 перекрывает выключатели 14 и 15, которые подают команду на ускоренный подъем ротора
4цилиндром 19. Совместно с ротором за счет воздействия тяги 11 поднимается блок 8 следящего устройства. Когд9 ротор 4 поднимется до положения, близкого к положению центрирования, сектор 18 вследствие уменьшения наклона стержня 9 прекращает взаимодействие с выключателем 14. При взаимодействии сектора 18 только с выкпюг чателем 15 подается команда на замедленный подъем. Подъем прекращается, когда сектор 18 прекращает взаимодействие с выключателем 15, т.е. после прихода контактного стержня 9 в горизонтальное положение. К этому моменту стержень 9, а вслед за ним блок 8 и ротор 4 совершают вертикальное перемещение, равное половине вер-- тикального перемещения вальца 5, т.е. центр ротор.а 4 установлен по оси ствола, который входит в отверстие рабочего органа станка, и начинается процесс его обработки. Далее ствол прижимается вальцом 20 и протаскивается сквозь рабочий орган. Под валец
5поступает следующий ствол. Если его диаметр больше диаметра первого ствола, то процесс центрирования рабочего органа повторяется в описанной последовательности. Если диаметр последующего ствола меньше диаметра предыдущего, то при опускании рычага 7 контактный стержень 9 наклоняется в противоположную сторону и сектор 18 взаимодействует с выключателями 16 и 17 аналогично ранее описанному.
Станок имеет линейную зависимость вертикальных перемещений прижимного вальца от диаметров обрабатываемых стволов, которая обеспечена размещением рычагов вальца в вертикальных плоскостях, параллельных продольной оси станка. Это перемещение вальца линейно передается рабочему органу, через следящее устройство благодаря перемещению блока 8 по вертикали и недеформируемости стержня 9. Кроме
3к
того, линейность перемещений блока 8 и контактного стержня исключает возможность превращения малых угловых погрешностей в значительные линейные , а размещение блока в зоне свободного конца рычага рабочего органа уменьшает относительные .пог- решности перемещений. Таким образом, станок характеризуется повьшенной точностью центрирования рабочего органа по стволу, которая обеспечина ет высокое качество обработки.
Форму
л а
изобретения 15
Стволообрабатывающий станок, содержащий смонтированные на раме подающий и приемный транспортеры, рабоА
924
чий орган в виде ротора, прижимной валец, установленный посредством рычагов на раме, и следящее устройство
в виде блока выключателей и контактного стержня, один конец которого соединен с прижимным вальцом, а другой - с блоком выключателей, отличающийся тем, что, с целью повышения качества обработки за счет увеличения точности центрирования ствола, рычаги прижимного вальца размещены в плоскости, параллельной продольной оси станка, блок выключателей 5 становлен подвижно на вертикальной направляющей и соединен шарнирной тягой с ротором, а контактный стержень соединен кулисным механизмом с рычагом прижимного вальца.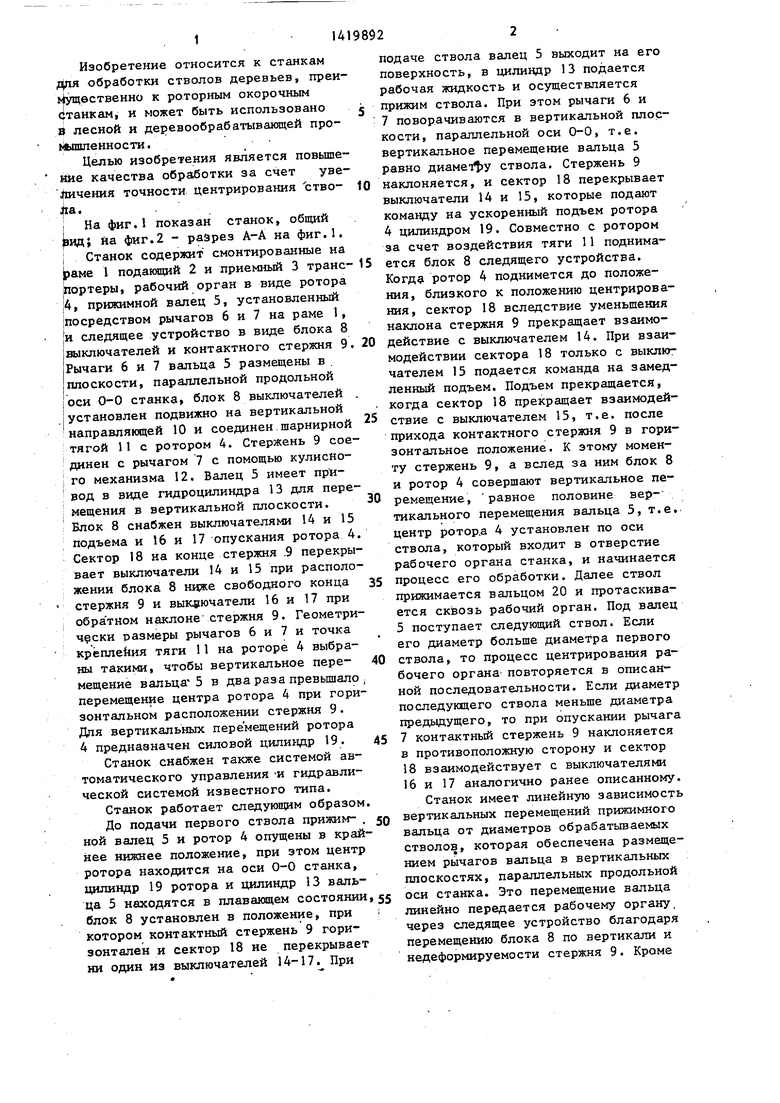
| название | год | авторы | номер документа |
|---|---|---|---|
| Роторный стволообрабатывающий станок | 1988 |
|
SU1572817A1 |
| Устройство для подачи бревен в деревообрабатывающие станки | 1983 |
|
SU1129074A1 |
| Станок для обработки круглыхлЕСОМАТЕРиАлОВ | 1979 |
|
SU793768A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ СТВОЛОВ ДЕРЕВЬЕВ В ДЕРЕВООБРАБАТЫВАЮЩИХ СТАНКАХ | 1973 |
|
SU407809A1 |
| Окорочно-зачистной станок | 1981 |
|
SU1027037A1 |
| Сучкорезный агрегат "онего | 1979 |
|
SU1192987A1 |
| Устройство для подачи бревен в стволообрабатывающий станок | 1978 |
|
SU899339A1 |
| СТАНОК ШЛИФОВАЛЬНЫЙ ШИРОКОЛЕНТОЧНЫЙ | 2001 |
|
RU2182073C1 |
| ОКОРОЧНЫЙ СТАНОК РОТОРНОГО ТИПА | 1973 |
|
SU398392A1 |
| Линия для изготовления щитов | 1984 |
|
SU1177155A1 |
Изобретение относится к лесной и деревообрабатывающей промьшшеннос- ти и может быть использовано в окорочных станках роторного типа. Цель изобретения - повышение качества обработки за счет, увеличения точности центрирования ствола. На раме 1 смонтированы подаюций2 и приемный 3 транспортеры, рабочий орган в виде ротора 4, прижимной валец 5, установленный посредством рычагов 6 и 7 на раме, и следящее устройство в виде блока 8 выключателей и контактного стержня 9, соединенного с рычагом 7 кулисным механизмом 12. Блок 8 установлен подвижно на вертикальной направляющей 10 и соединен шарнирной тягой 11 с ротором 4. При подаче ствола валец 5 выходит на его поверхность и своим рычагом 7 воздействует на стержень 9, который, отклоняясь вверх или вниз, своим сектором 18 включает или выключает выключатели 14-17. Эти выключатели дают сигнал на подъем или опускание ротора до совмещения продольной оси ствола и центра ротора. За счет автоматизации центрирования и точности обеспечивается повышение качества обработки. 2 ил. (Л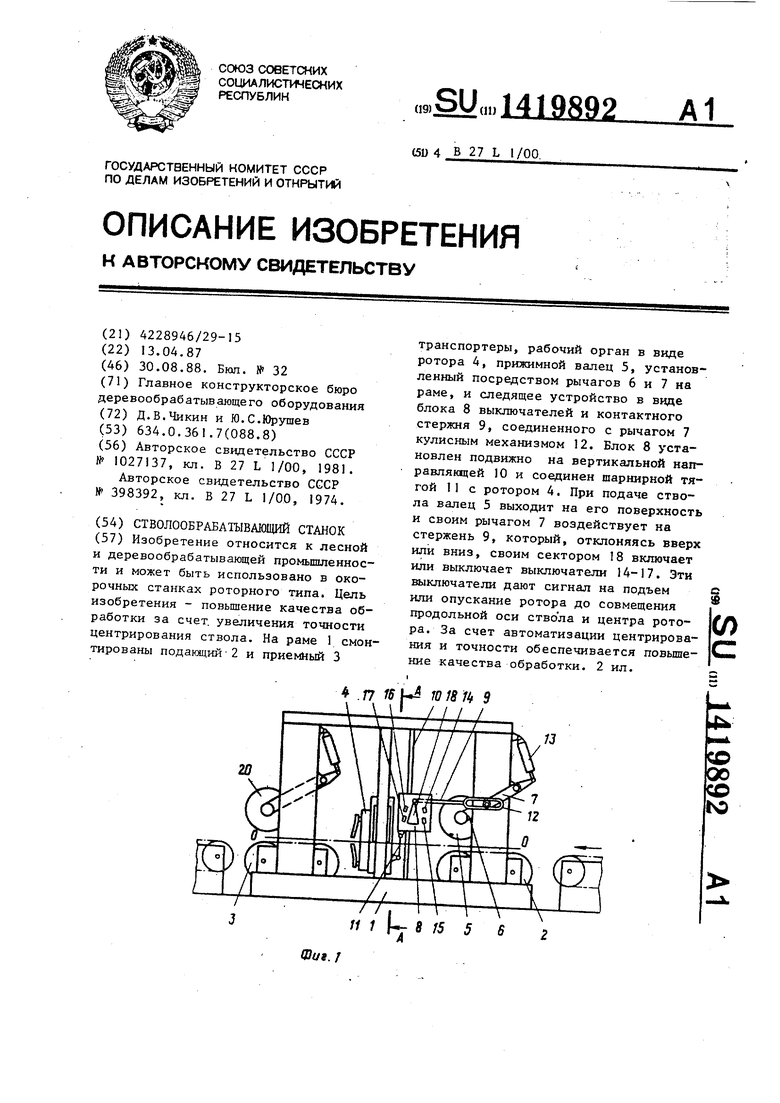
| Устройство уплотнения пневмоподъемника | 1982 |
|
SU1027137A1 |
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
| ОКОРОЧНЫЙ СТАНОК РОТОРНОГО ТИПА | 0 |
|
SU398392A1 |
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
