/ @
А
Ч
1 г 7
v
(Б i 3
Ь4А
А
со со
О5
-Н +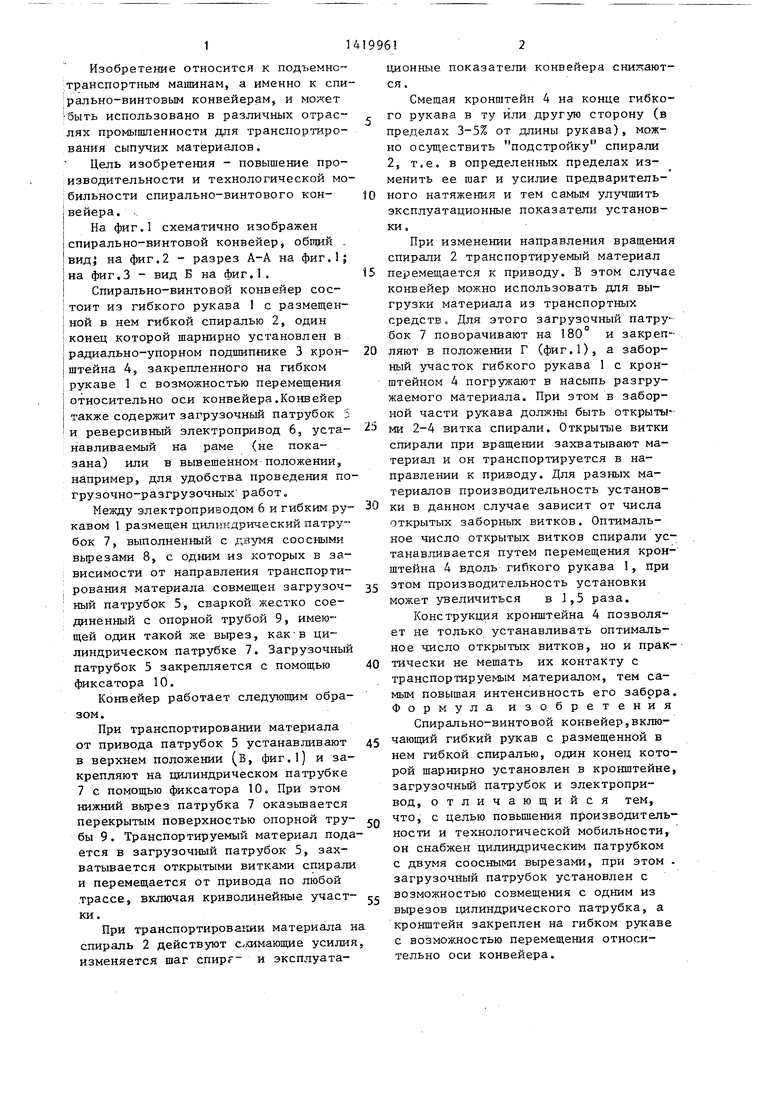
| название | год | авторы | номер документа |
|---|---|---|---|
| Гибкий шнек | 1980 |
|
SU908698A1 |
| Гибкий винтовой конвейер | 1985 |
|
SU1323479A1 |
| ВЕРТИКАЛЬНЫЙ ВИНТОВОЙ КОНВЕЙЕР ДЛЯ ТРАНСПОРТИРОВАНИЯ СЫПУЧИХ МАТЕРИАЛОВ | 1998 |
|
RU2130418C1 |
| Спирально-винтовой конвейер | 1973 |
|
SU615007A1 |
| Гибкий винтовой конвейер | 1990 |
|
SU1798273A1 |
| Гибкий винтовой конвейер | 1986 |
|
SU1315369A1 |
| Спиральный конвейер | 1986 |
|
SU1362690A1 |
| Винтовой конвейер | 1991 |
|
SU1807971A3 |
| Способ транспортирования материалов гибкой спиралью | 1982 |
|
SU1039834A1 |
| Спирально-винтовой конвейер | 1990 |
|
SU1756240A1 |
Изобретение относится к подъемно-транспортным машинам. Цель изобретения - повьшение произ-ти и технологической мобильности. В гибком рукаве 1 конвейера размещена гибкая спираль 2. Один конец спирали 2 шарнирно установлен в кронштейне 4, который закреплен на рукаве 1 с возможностью перемещения относительно оси конвейера, имеющего электропривод 6. Между приводом 6 и рукавом 1 размещен цилиндрический патрубок 7 с двумя соосными вьфазами, С одним из этих вырезов совмещается загрузочный патрубок 5. Смещая кронштейн 4 в ту или иную сторону, можно в определенных пределах изменять шаг спи- рали 2 и усилие предварительного натяжения, улучшая тем самым эксплуатационные показатели конвейера. Перемещением кронштейна 4 вдоль рукава 1 устанавливается .число открытых витков спирали 2, что влияет на произ-сть конвейера. 3 ил. (Л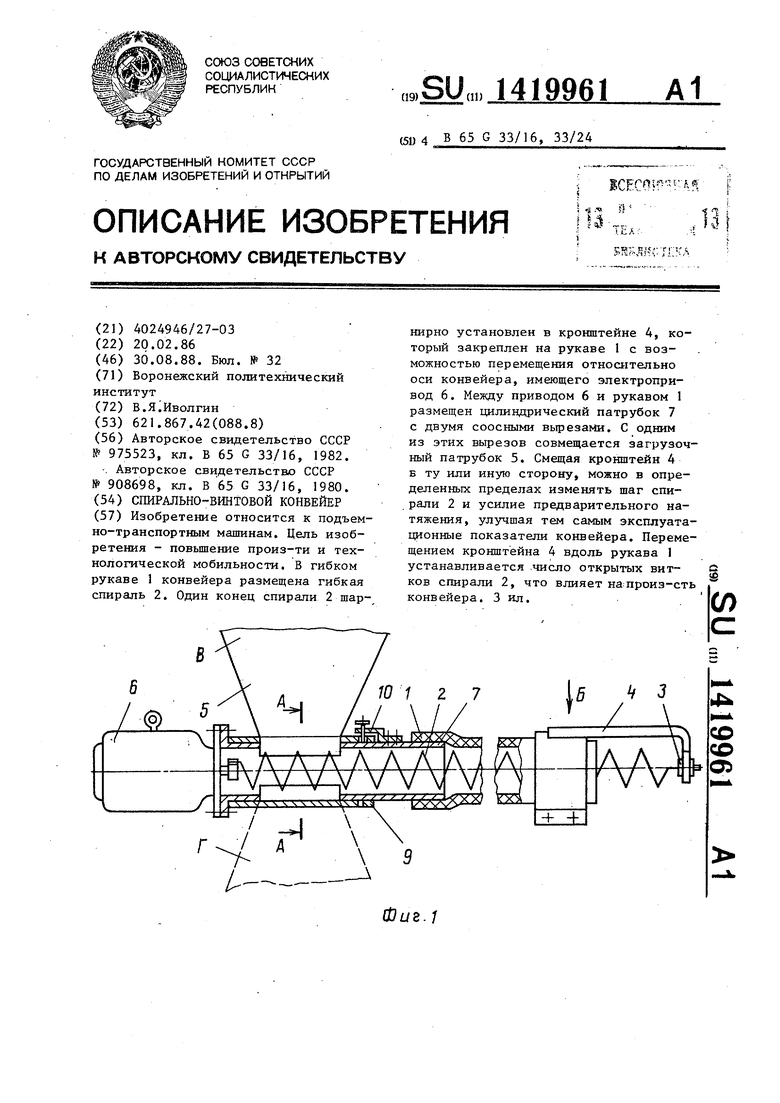
Фиё.1
10
20
2:5
1U19961
Изобретение относится к подъемно- ранспортным машинам, а именно к спи- рально-винтовым конвейерам, и может быть использовано в различных отрасях промышпенности для транспортирования сыпучих материалов.
Цель изобретения - повышение производительности и технологической мо- бильности спирально-винтового кон- вейера. .,
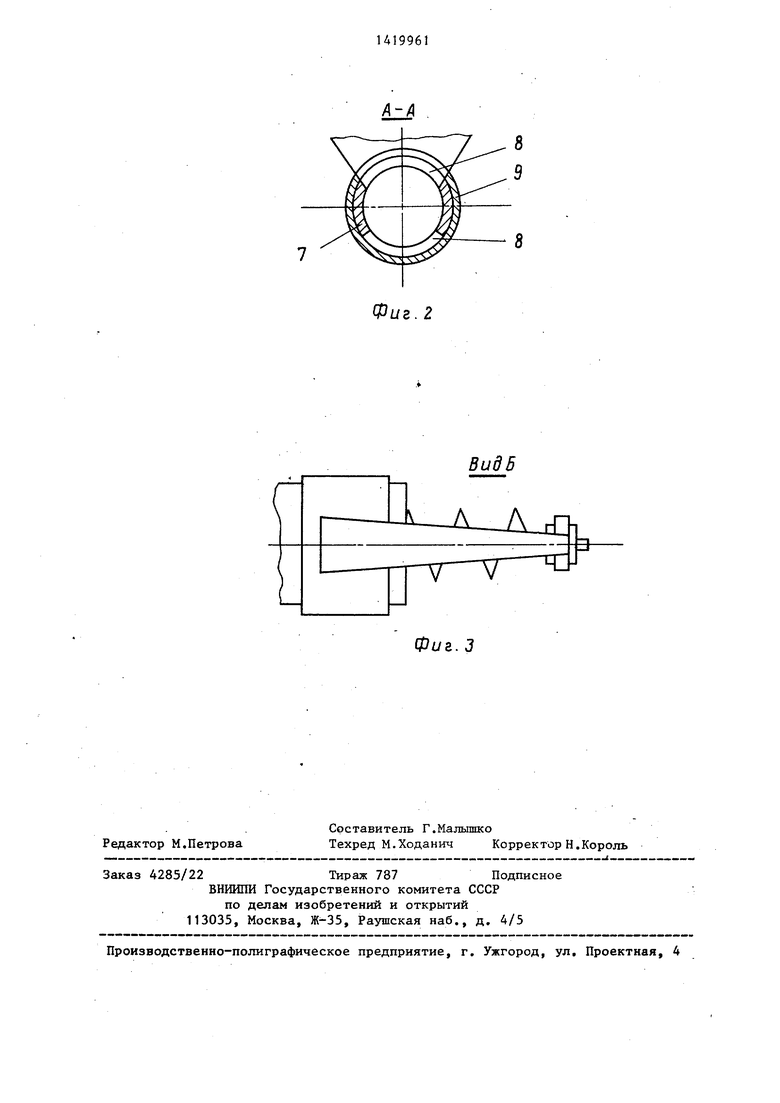
На фиг.1 схематично изображен спирально-винтовой конвейер, общий . ид; на фиг,2 - разрез А-А на фиг,1| на фиг.З - вид Б на фиг.1.
Спирально-винтовой конвейер состоит из гибкого рукава 1 с размещен- ной в нем гибкой спиралью 2, один онец которой шарнирно установлен в адиально-упорном подшипнике 3 кронтейна 4, закрепленного на гибком рукаве 1 с возможностью перемещения относительно оси конвейера.Конвейер также содержит загрузочньш патрубок 5 реверсивный электропривод 6, устанавливаемый на раме (не показана) или в вывешенном положении, например, для удобства проведения по- грузочно-разгрузочных работ.
Между электроприводом 6 и гибким ру- 30 кавом 1 размещен цилиндрический патрубок 7, выполненный с двумя соосными вырезами 8, с одним из которых в зависимости от направления транспортирования материала совмещен загрузочный патрубок 5, сваркой жестко соединенный с опорной трубой 9, имеющей один такой же вырез, как-в цилиндрическом патрубке 7. Загрузочный патрубок 5 закрепляется с помощью фиксатора 10.
Конвейер работает следующим образом.
При транспортироваьши материала от привода патрубок 5 устанавливают в верхнем положении (В, фиг.1) и закрепляют на цилиндрическом патрубке 7 с помощью фиксатора 10. При этом нижний вырез патрубка 7 оказьшается перекрытым поверхностью опорной трубы 9. Транспортируемый материал подается в загрузочный патрубок 5, захватывается открытыми витками спирали и перемещается от привода по любой трассе, включая криволинейные участ- 5 ки.
При транспортировании материала на спираль 2 действуют с.шмающие усилия, изменяется шаг cпиpf- и эксплуатацися
го пр но 2, ме но эк ки
сп 15 пе ко гр ср бо ля ны шт жа но ми сп те пр те ки от но та шт эт мо
ет но ти тр мы Ф
45 ча не ро за во чт но он с за во вь кр с те
35
40
50
0
0
:5
0
5
ционные показатели конвейера снижаются .
Смещая кронштейн 4 на конце гибкого рукава в ту или другую сторону (в пределах 3-5% от длины рукава), можно осуществить подстройку спирали 2, т.е, в определенных пределах изменить ее шаг и усилие предварительного натяжения и тем самым улучшить эксплуатационные показатели установки.
При изменении направления вращения спирали 2 транспортируемый материал 5 перемещается к приводу. В этом случае конвейер можно использовать для выгрузки материала из транспортных средств, Для этого загрузочный патрубок 7 поворачивают на 180° и закрепляют в положении Г (фиг.1), а заборный участок гибкого рукава 1 с кронштейном 4 погружают в насыпь разгружаемого материала. При этом в заборной части рукава должны быть открыты ми 2-4 витка спирали. Открытые витки спирали при вращении захватывают материал и он транспортируется в направлении к приводу. Для разных материалов производительность установки в данном случае зависит от числа открытых заборных витков. Оптимальное число открытых витков спирали устанавливается путем перемещения крон- штейна 4 вдоль гибкого рукава 1, при этом производительность установки может увеличиться в 1,5 раза.
Конструкция кронштейна 4 позволяет не только устанавливать оптимальное число открытых витков, но и прак- тически не мешать их контакту с транспортируемым материалом, тем самым повышая интенсивность его забора. Формула изобретения
Спирально-винтовой конвейер,вклю- 5 чающий гибкий рукав с размещенной в нем гибкой спиралью, один конец которой шарнирно установлен в кронштейне, загрузочный патрубок и электропривод, отличающийся тем, что, с целью повьш1ения производительности и технологической мобильности, он снабжен цилиндрическим патрубком с двумя соосными вырезами, при этом . загрузочный патрубок установлен с возможностью совмещения с одним из вьфезов цилиндрического патрубка, а кронштейн закреплен на гибком рукаве с возможностью перемещения относительно оси конвейера.
5
0
0
Фиг.2
ВидБ
Фиг. 3
| Спирально-винтовой конвейер | 1981 |
|
SU975523A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Гибкий шнек | 1980 |
|
SU908698A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
