Ё
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство комбинированного управления электроприводом поворота экскаватора | 1990 |
|
SU1810440A1 |
| УСТРОЙСТВО КОМБИНИРОВАННОГО ОПТИМАЛЬНОГО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ЭКСКАВАТОРА | 1990 |
|
RU2030521C1 |
| Устройство управления электроприводом одноковшового экскаватора | 1989 |
|
SU1742425A1 |
| Способ ограничения динамических нагрузок механизма поворота экскаватора и устройство для его реализации | 1990 |
|
SU1781393A1 |
| Устройство для ограничения динамических нагрузок в экскаваторных механизмах | 1986 |
|
SU1416627A1 |
| Устройство управления электроприводом одноковшового экскаватора | 1986 |
|
SU1420127A1 |
| Устройство управления электроприводами механизмов одноковшового экскаватора | 1989 |
|
SU1719561A1 |
| Устройство управления электроприводами эскаватора | 1986 |
|
SU1432150A1 |
| Способ управления электроприводом одноковшового экскаватора и устройство для его осуществления | 1988 |
|
SU1629423A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ ЭКСКАВАТОРА | 2001 |
|
RU2193630C1 |
Сущность изобретения: устройство управления электроприводом одноковшового экскаватора содержит командоаппарат, сумматор, возбудитель и генератор с присоединенным к нему двигателем, датчик напряжения возбуждения, датчик тока возбуждения, датчик возбуждения тока якоря, датчик скорости, блок производной тока якоря, регулятор, который ограничивает ток стопорным значением и формирует оптимальный характер переходных процессов. 1 ил.
Изобретение относится к управлению горной техникой, а именно к управлению электроприводами главных механизмов одноковшовых экскаваторов.
Целью изобретения является повышение надежности и производительности экскаватора путем снижения динамических нагрузок в механической части.
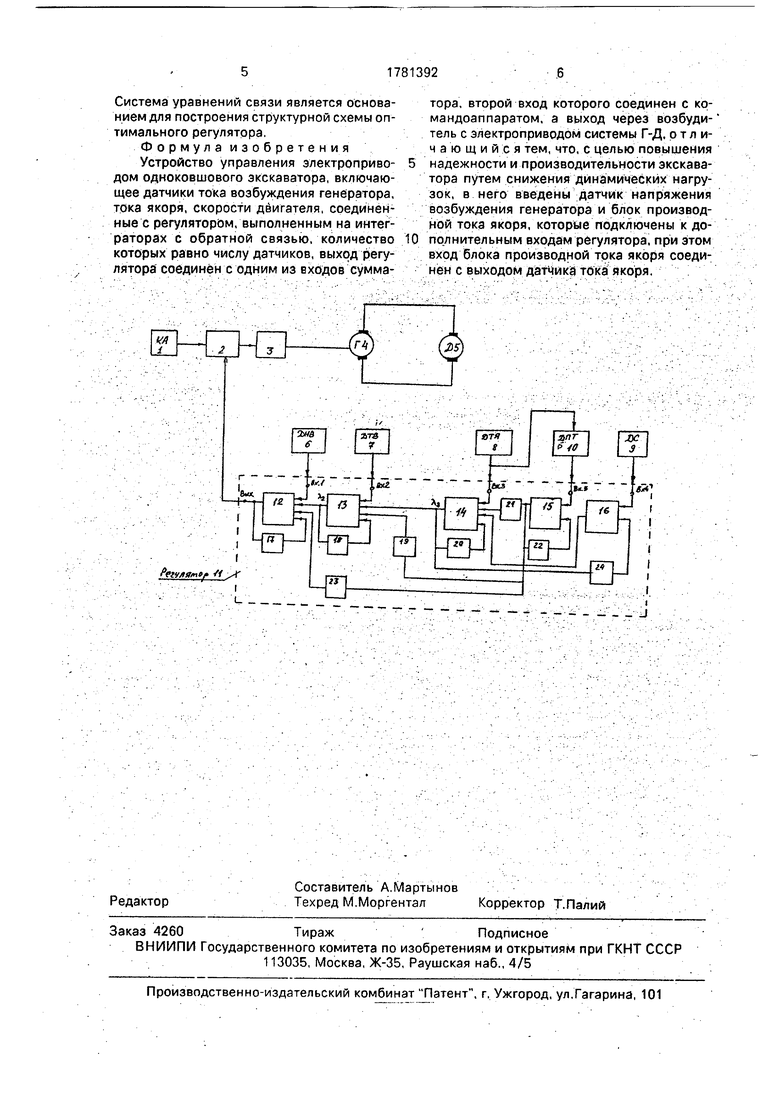
На чертеже представлена блок-схема устройства управления электроприводом одноковшового экскаватора
Устройство включает в себя последовательно соединенные командоаппарат 1, сумматор 2, возбудитель 3 и генератор 4 с присоединенным к нему двигателем 5.
.Выходыдатчиков напряжения возбуждения ШНВ) 6, тока возбуждения (ДТВ) 7, тока якоря (ДТЯ) 8, скорости (ДС) 9. блок производной тока якоря (БПТ) 10, соединены соответственно к входам вх 1, вх.2, вх.З, вх,4, вх.5 регулятора 11, который ограничивает ток стопорным значением, формирует оптимальный характер переходных процессов, выход регулятора 11 соединен со вторым входом сумматора 2, кроме того выход (ДТЯ) 8 соединен с входом (ДПТ) 10. Регулятор 11 состоит из пяти интеграторов 12-16, инвертирующих усилителей 17-22 и двух усилителей 23. 24. Вход(вх.1) регулятора 11 присоединен к входу первого интегратора 12, в цепь обратной связи которого включен усилитель инвертирующий 17, выход первого интегратора 12 соединен с выходом регулятора 11, вход (вх.2) регулятора 11 соединен с первым входом второго интегратора 13, в цепи обратной связи которого включен усилитель инвертирующий 18, выход второго интегратора 13 соединен с третьим входом первого интегратора 12, четвертый вход которого через усилитель 23 соединен с шхо- дом четвертого интегратора 15, в цепи обратной связи которого включен усилитель
is
СА
Ч itO
инвертирующий 22, второй вход интегратора 15 соединен с входом (вх.5) регулятора 11, выход четвертого интегратора 15 через усилитель инвертирующий 19 соединен с третьим входом интегратора 13, четвертый вход которого соединен с выходом интегратора 14, в цепи обратной связи которого включен усилитель инвертирующий 20, второй вход интегратора 14 соединен с входом (вх.З) регулятора 11, третий вход через уси- литель инвертирующий 21с выходом интегратора 15, четвертый вход интегратора 14 соединен с выходом интегратора 16, один вход которого соединен с выходом интегратора 14 через усилитель 24, второй, вход интегратора 16 соединен с входом (вх.4) регулятора 11.
Блок производной тока якоря осуществляет преобразование сигнала тока и является составной частью регулятора.
Устройство работает следующим образом. .-«-
Сигналы обратных связей по напряжению возбуждения, току возбуждения, току якоря, производной тока якоря и скорости двигателя поступают в регулятор 11. вырабатывающий оптимальное управляющее воздействие и воспроизводящий сигналы внешней, выходной и четырех внутренних координат, которые получаются на выходах соответственно интеграторов 12, 13, 14, 15 и 16. Все интеграторы являются инвертирующими, а первые четыре интегратора являются форсирующими за счет наличия в цепях обратной связи усилителей инверти- рующих 17 18, 20, 22 Сигнал выходной координаты регулятора получают после форсированного интегрирования в интеграторе 12 сигналов с датчика напряжения возбуждения 6,первой внутренней координаты с интегратора 13 и усиленного в усилителе 23 сигнала третьей внутренней координаты с интегратора 15 Сигнал первой внутренней координаты регулятора получают после форсированного интегрирования в интегра- торе 13 сигналов с датчика тока возбуждения 7, второй внутренней координаты и третьей внутренней координаты, усиленного в инвертирующем усилителе 19. Сигнал второй внутренней координаты с интеграто- ра 14 получают после форсированного интегрирования сигналов с датчика тока якоря, третьей внутренней координаты, усиленного в инвертирующем усилителе 21. и четвертой внутренней координаты Сигнал третьей внутренней координаты получают после форсированного интегрирования с интегратора 15 сигнала с датчика производной тока якоря. Сигнал четвертой внутренней координ-зты регулятора получают
интегрированием в интеграторе 16 сигнала с датчика скорости и сигнала второй внутренней координаты,усиленной в усилителе 24. Сигнал оптимального управляющего воздействия с выхода регулятора суммируется в сумматоре 2 с задающим сигналом, поступающим с командоаппарата 1. Сигнал рассогласования с выхода сумматора 2 является управляющим воздействием, приходящем йа вход возбудителя 3, управляющего генератором 4, от которого получает питание якорная цепь двигателя 5.
Алгоритм оптимального регулятора определяется на основании математической теории оптимального управления.
Электропривод по системе СМУ-Г-Д с датчиком производной тока в относительных единицах может быть представлена системой дифференциальных уравнений:
xi -anxi + bu.
2 321X1 -322X2,
хз аз2Х2 - аззхз - аз4Х4,
Х4 ;Г43ХЗ.(1)
Х5 351X1 - Э52Х2 - Э53ХЗ - Э55Х5 где xi Х2. хз, Х4, Х5 - соответственно напряжение возбуждения, ток возбуждения, ток якоря скорость двигателя, производная тока якоря в относительных единицах ац, 321, 322, аз2, азз. аз4. Ь, 343 - параметры электропривода в относительных единицах, asi
332321, 352 332322, 353 334343, 355 Э43
u - управляющее воздействие. Критерий оптимальности имеет вид
1 °°
I 7 / (Х12 + Х22 + ХЗ2 + Х42 + Х52 + U2)dt О
Составим функцию Лагранжа: F (xi2 + х2 + хз2 + Х42 + и2)+
+ Ai (xi+ailX1,bu) + Л.2(Х2- Э21Х1 + 322X2) + + Аз (хз Э32Х2 + 333X3 + 834X4) + + /Ц (Х4 - 343X3) + As (Х5 - 351X1+ Э52Х2+ Ь 353X3 + 355X5),
где Ai, A2, АЗ, AI, Ав - неопределенные множители Лагранжа
u° bAi
Решая систему уравнений Эйлера
dF Эх,
.if.
их.
0.
Определим систему уравнений связи Ai aii Ai - Э21А2 - 351 As + xi
Ад 322 A2 - Э32 Аз + 352 As + Х2 ,
Аз азз Аз - 343 А4 + 353 As + хз 334 Аз -f X4
As 355 Аб + Х5
(2)
Система уравнений связи является основанием для построения структурной схемы оптимального регулятора.
Формула изобретения Устройство управления электроприводом одноковшового экскаватора, включающее датчики тока возбуждения генератора, тока якоря, скорости двигателя, соединенные с регулятором, выполненным на интеграторах с обратной связью, количество которых равно числу датчиков, выход регулятора соединен с одним из входов суммаг 6-х
fatfJHfmtf VY Л
тора, второй вход которого соединен с ко- мандоаппаратом, а выход через возбудитель с электроприводом системы Г-Д, отличающийся тем, что, с целью повышения надежности и производительности экскаватора путем снижения динамических нагрузок, в него введены датчик напряжения возбуждения генератора и блок производной тока якоря, которые подключены к дополнительным входам регулятора, при этом вход блока производной тока якоря соединен с выходом датчика тока якоря.
