Фиг 2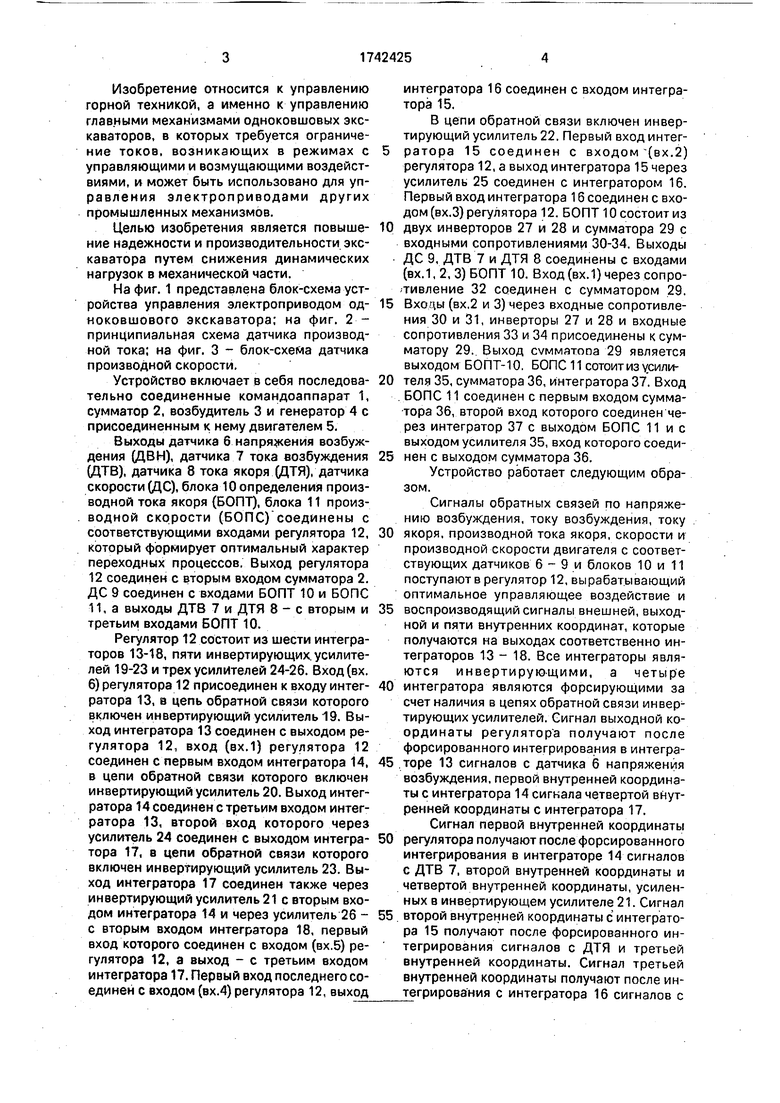
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления электроприводом одноковшового экскаватора | 1989 |
|
SU1781392A1 |
| УСТРОЙСТВО КОМБИНИРОВАННОГО ОПТИМАЛЬНОГО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ЭКСКАВАТОРА | 1990 |
|
RU2030521C1 |
| Устройство управления электроприводом одноковшового экскаватора | 1986 |
|
SU1420127A1 |
| Устройство для ограничения динамических нагрузок копающих механизмов экскаватора | 1990 |
|
SU1740571A1 |
| Устройство управления электроприводами механизмов одноковшового экскаватора | 1989 |
|
SU1719561A1 |
| Устройство для ограничения динамических нагрузок в экскаваторных механизмах | 1986 |
|
SU1416627A1 |
| Способ ограничения динамических нагрузок механизма поворота экскаватора и устройство для его реализации | 1990 |
|
SU1781393A1 |
| Устройство управления электроприводами эскаватора | 1986 |
|
SU1432150A1 |
| Устройство управления электроприводом одноковшового экскаватора | 1986 |
|
SU1382919A1 |
| Устройство комбинированного управления электроприводом поворота экскаватора | 1990 |
|
SU1810440A1 |
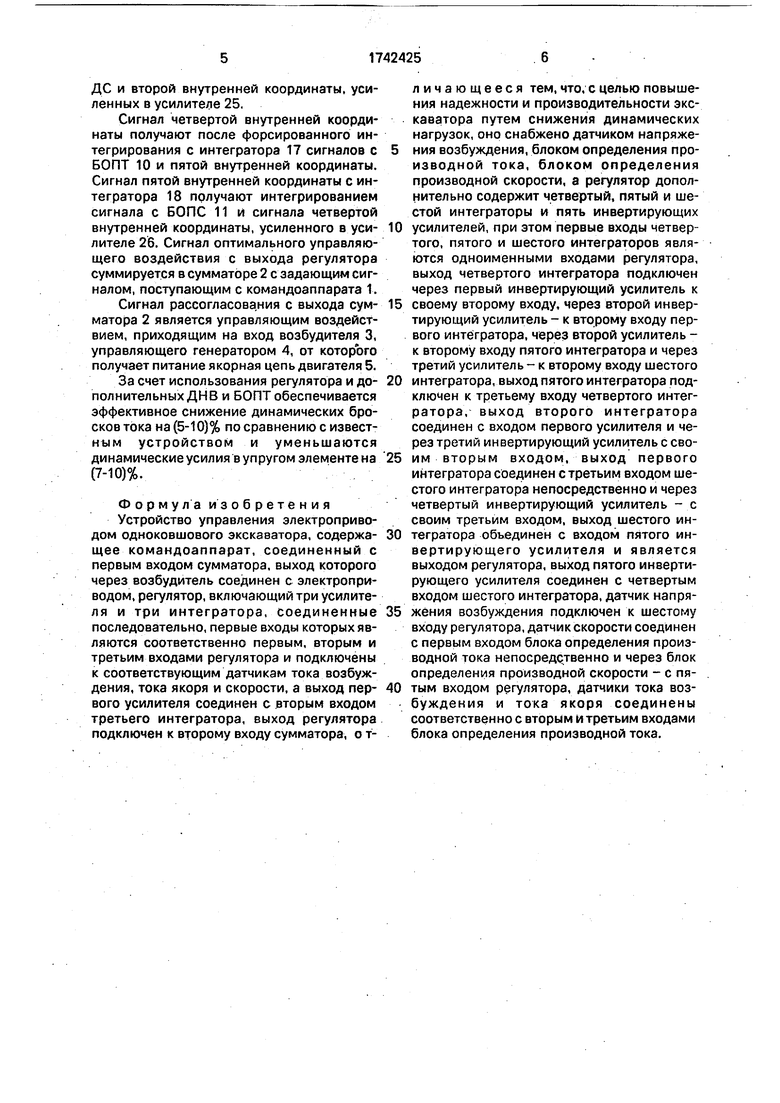
Изобретение относится к управлению горной техникой и предназначено для управления электроприводами одноковшовых экскаваторов и др. пром. механизмов. Цель изобретения - повышение надежности и произв-сти экскаватора путем снижения динамических нагрузок в механической части. Устр-во содержит командоаппарат 1, сумматор 2, возбудитель 3, электропривод 5, регулятор 12, состоящий из соединенных последовательно усилителей 24-26 и интеграторов 13-14, датчики 7-9 тока возбуждения, тока якоря и скорости соответственно. Дополнительно устр-во снабжено датчиком 6 напряжения,блоком Юопределения производной тока и блоком 11 определения производной скорости. При этом регулятор 12 дополнительно снабжен тремя интеграторами 15-18 и пятью инвертирующими усилителями 19-25. Сигналы с датчиков 6-9 и блоков 10 и 11 поступают в регулятор 12, который вырабатывает оптимальное управляющее воздействие и воспроизводит сигналы внешней, выходной и пяти внутренних координат, которые получаются на выходах интеграторов 13-18. Сигнал оптимального управляющего воздействия с выхода регулятора 12 суммируется в сумматоре 2 с задающим сигналом, поступающим с командоаппарата 1. Сигнал рассогласования с выхода сумматора 2 является управляющим воздействием, приходящим на вход возбудителя 3, управляющего генератором 4, от которого получает питание якорная цепь двигателя 5. 3 ил. 77 & Ё VI - Ю -fcb ю ел
1-
Фиг 3
Редактор О. Хрипта
Составитель О. Капканец
Техред М.МоргенталКорректор М. Демчик
ДОпс
| Устройство управления электроприводами эскаватора | 1986 |
|
SU1432150A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство управления электроприводом одноковшового экскаватора | 1986 |
|
SU1420127A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
