Изобретение относится к механизации выемки полезных ископаемых очистными комплексами и агрегатами и может быть использовано в бесцепных-системах перемещения выемочных комбайнов.
Цель изобретения - повышение надежности работы.
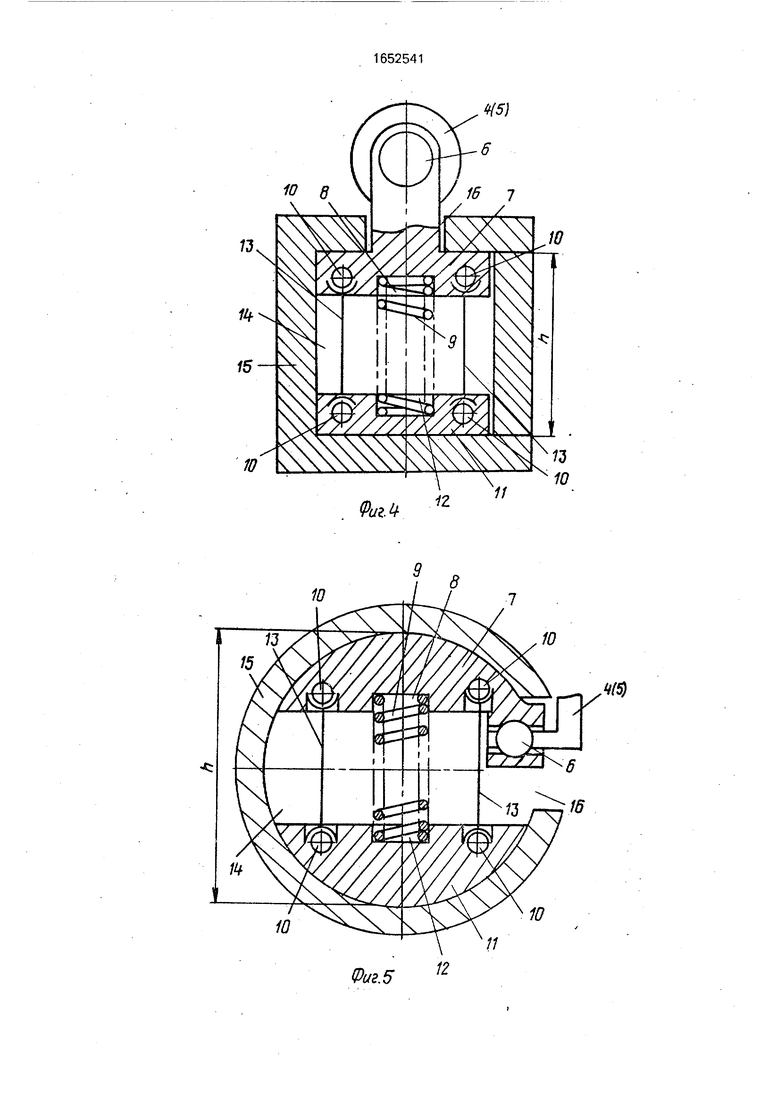
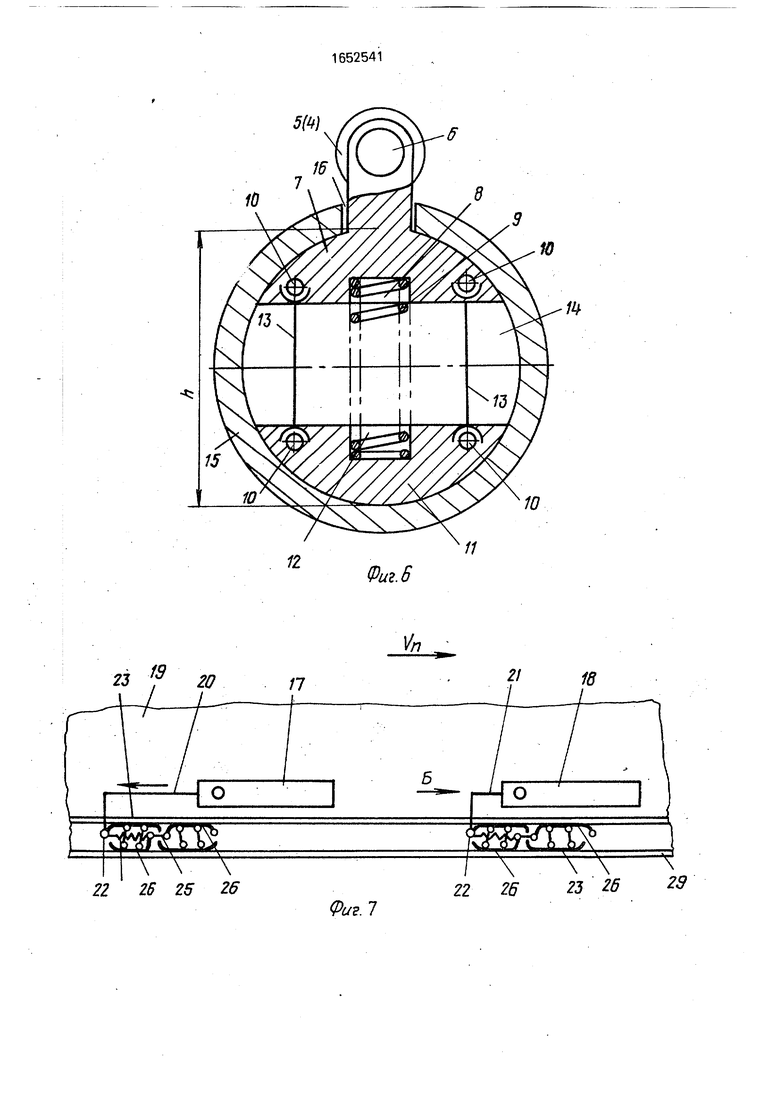
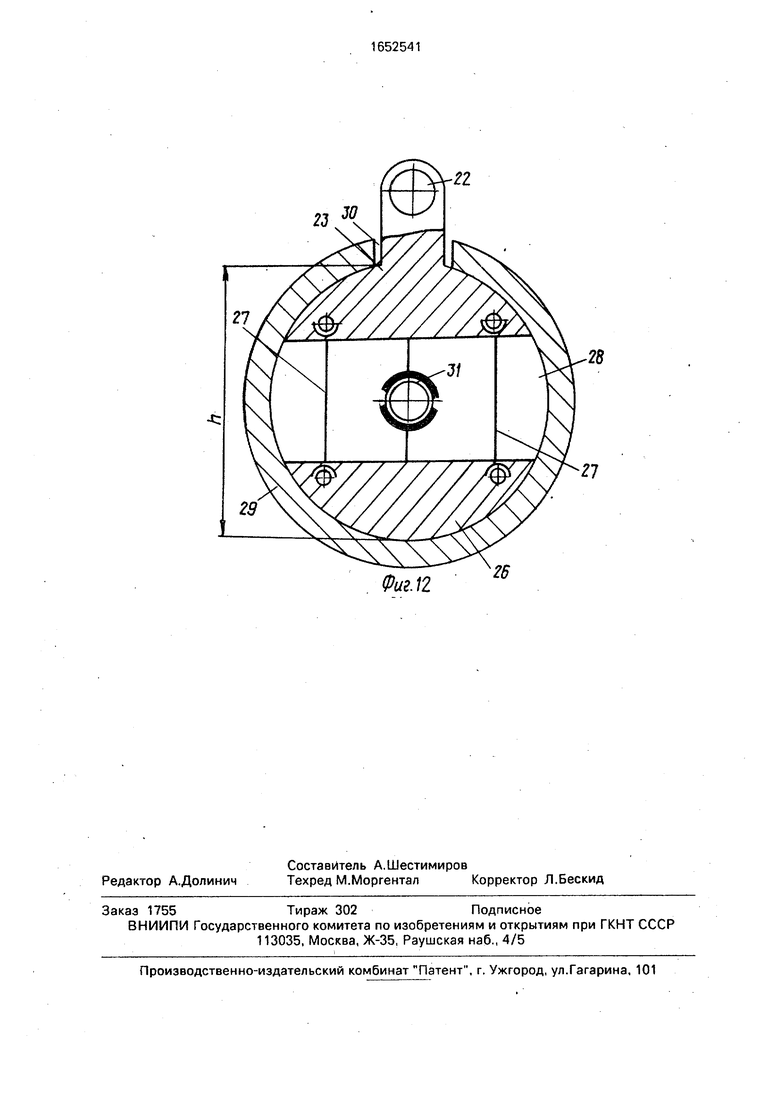
На фиг. 1 изображена схема механизма перемещения выемочного комбайна, план; на фиг.2 - то же, вид сбоку; на фиг.З - механизм захвата с секционной направляющей прямоугольного поперечного сечения с прорезью в вертикальной плоскости, поперечный разрез; на фиг.4 - то же, с прорезью в горизонтальной плоскости; на фиг.5 - механизм захвата с секционной направляющей круглого поперечного сечения с прорезью в вертикальной плоскости, поперечный разрез; на фиг.6 - то же. с прорезью в горизонтальной плоскости; на фиг.7 - схема механизма перемещения выемочного комбайна с S-образной планкой, вид сбоку; на фиг.З - схема механизма захвата с S-образной планкой, продольный разрез; на фиг.9 механизм захвата с S-образной планкой при секционной направляющей прямоугольного поперечного сечения, с прорезью в вертикальной плоскости, поперечный разрез: на фиг.10 - то же, с прорезью в горизонтальной плоскости; на фиг. 11 - механизм захвата с S-образной планкой при секционной направляющей круглого поперечного сечения с прорезью в вертикальной плоскости, поперечный разрез; на фиг.12 - то же, с прорезью в горизонтальной плоскости.
Механизм перемещения оыемочного комбайна (фиг. 1-6) включает гидродомкраты 1 и 2, шарнирно закрепленные на раме 3 корпуса комбайна, штоки 4 и 5 которых соединены сферическими шарнирами 6 с планками 7 механизмов захватов, каждый из которых содержит планку 7, выполненную с гнездами 8 для размещения пружин сжатия 9, соединенную сферическими шарнирами 10 с противоположной планкой 11, выполненной с гнездами 12 под пружины 9, посредством промежуточных параллельных звеньев 13 равной длины. Оба механизма захватов в целом размещены в продольной полости 14 секционной направляющей 15 с возможностью взаимодействия планок 7 и противоположных планок 11 с поверхностями полости 14 секционной направляю- щей 15, выполненной в виде, например, трубы с прямоугольным (фиг.З, 4) круглым (фиг.5,6) или другим поперечным сечением и со сквозной продольной прорезью 16 в стенке, выполненной в вертикальной или горизонтальной плоскости для прохода штоков 4 и 5 гидродомкратов 1 и 2 и закрепленной на раме конвейера (не показана). Пружины 9 обеспечивают прижим планок 7 и 11 к поверхностям продольной полости 14 секционной направляющей 15, а расстояние h между поверхностями продольной полосы 14 секционной направляющей 15 выполнено меньшим размера h по наружным поверхностям планск 7 и 11 в по- ложении их перпендикулярно промежуточным параллельным звеньям 13. Планки 7 могут быть выполнены с приливами, в которых расположены сферические шарниры G для присоединения штоков 4 и 5 гидродомкратов. При этом приливы (не обозначены) помещены в сквозной продольной прорези 16 секционной направляющей 15. Кроме того, планки 7 и 11 могут содержать на наружной поверхности риф- лении (не показаны).
Механизм перемещения (фиг. 1-6) работает следующим образом.
Механизм перемещения (фиг.1-6) вклю- (яет два одинаковых механизма захватов,
шарнирно присоединенных к штокам 4 и 5 гидродомкратов 1 и 2 и размещенных в целом в продольной полости 14 трубы секционной направляющей 15 с возможностью взаимодействия с поверхностями этой полости. Для движения комбайна, например, слева направо пострелке Упот гидропривода комбайна, содержащего гидрораспреде- лительный механизм (не показаны), жидкость подается в заштоковую полость гидродомкрата 1 и штоковую полость гидродомкрата 2. При этом шток 4 гидродомкрата 1 перемещается справа налево по стрелке А, перемещает соединенную с ним посредством сферического шарнира 6 планку 7 левого (фиг,2) механизма зяхвата справа налево. Промежуточные параллельные звенья 13 равной длины, соединенные сферическими шарнирами 10 с планкой 7 и противоположно расположенной планкой 11 и наклоненные вправо относительно планки 11, поворачиваются против часовой стрелки и оаспирают планки 7 и 11 в продольной- полости 14 секционной направляющей 15. Планки 7 и 11. прижатые своими наружными поверхностями к поверхностям полости 14 т рубы секционной направляющей 15, заклинивают в полости 14 и в связи с тем, что секционная направляющая 15 закреплена на неподвижной раме конвейера (не показана), останавливаются. При этом останавливается шток 4 гидродомкрата 1, а цилиндр его, шарнирно закрепленный на корпусе (раме) 3 комбайна, перемещается совместно с комбайном в направлении подачи Vn. Заклинивание планок 7 и 11 в продольной полости 14 секционной направляющей 15 обеспечивается вследствие выполнения расстояния h между поверхностями продольной полости 14 меньшим размера h по наружным поверхностям планок 7 и 11 в положении их перпендикулярно промежуточным параллельным звеньям 13, т.е. в свободном положении элементов 7, 11 и 13 механизмов захватов, когда они не размещены в полости 14. При монтаже оба механизма захватов помещаются в продольной полости 14 секционной направляющей 15 и вследствие указанной разности h промежуточные параллельные звенья 13 получают наклон относительно планок 11 вправо для обеспечения движения комбайна вправо по стрелке Уп и влево для обеспечения обратного движения комбайна.
В то же время жидкое ib, поступающая в штоковую почос.ь гидроломкрата 2. шарнирно закрепленного на корпусе (раме) 3 комбайна, перемещает шток 5 слева направо по стрелке Б, который свободно перемещается по сквозной продольной прорези 16
выполненной в стенке (трубы) секционной направляющей 15 и в вертикальной или горизонтальной плоскости в зависимости от расположения гидродомкратов 1 и2 относительно секционной направляющей 15. Конструктивно предлагаемое устройство допускает возможность изготовления планок 7 с приливами (не обозначены), размещаемыми в сквозной продольной прорези 16 и перемещающимися по ней, в которых в этом случае размещаются сферические шарниры б для присоединения штоков 4 и 5 гидродомкратов 1 и 2. Шток 5, соединенный сферическим шарниром 6 с планкой 7 второго (правого фиг. 1 и 2) механизма захвата той же конструкции, что и описанный выше левый механизм захвата, перемещает планку 7 также слева направо, которая поворачивает промежуточные параллельные звенья 13 равной длины, наклоненные вправо относительно плянки 11 по часовой стрелке. Планки 7 и 11 освобождаются от распорного усилия звеньев 13, сжимают пружины 9, размещенные между планками 7 и 11, и отходят от поверхностей продольной полости 14, планки 7 и 11 расклинивя- ются в полости 14 и свободно по ней перемещаются совместно с промежуточными параллельными звеньями 13. т.е. механизм захвата (правого по фиг.1 и 2) в целом свободно перемещается по продольной полости 14 трубы секционной направляющей 15 совместно со штоком 5 гидродомкрата 2. При этом вследствие разности обьемов в штоковой и заштоковой полостях гидродомкратов 1 и 2 перемещение штока 5 происходит быстрее, чем штока 4 относительно цилиндра гидродомкрата 1, т.е. до момента остановки цилиндра гидродомкрата 1, перемещающего комбайн в направлении Vn, шток 5 гидродомкрата 2 совместно со своим механизмом захвата возвращается в исходное для рабочего хода (подачи машины) положение. Подачей жидкости в заштокопую полость гидродомкрага 2 производится выдвижение штока 5 справа налево и заклинивание правого мехлнизмя захвата в полости 14 секционной направляющей 15 до момента остановки цилиндрл гидродомкрата 1, что обеспечивает безостановочную подячу выемочного комбайна я направлении Vn.Ho вступлении в работу 1идродомкрзта 2 и правого (фиг.2) механизма захвата 7, 11, 13 шток 4 гидродомкрята 1 подачей жидкости в штоковую полость перемещается слева направо, расклинивает аналогичным описанному образом левый (фиг.2) механизм захвата с поверхностями полости 14 (с секционной напрэвллющеи 15) трубы секционной направляющей 15, и свободно
перемещает ею по по/юсги 14 слевл нлпра- во до исходной для рабочего хода позиции. Затем цикл повторяется.
Обратное перемещение комбайна мож
но осуществить путем изменения наклона промежуточных параллельных звеньев 13 механизмов захватов при монтаже их в полости 14 секционной направляющей 15, либо разворотом механизмов захватов в
0 целом на 180° также при монтаже. Кроме того, комбайн может быть оснащен дополнительно двумя механизмами захватов со своими гидродомкратами, промежуточные параллельные звенья равной длины кото5 рых наклонены противоположно наклону их в основных механизмах захватов. В таком случае для обратного движения комбайна достаточно выключать основную пару механизмов захватов и включить дополнитель0 ную. В предлагаемой конструкции, механизма перемещения выемочного комбайна отсутствует относительное движение звеньев механизмов захватов на рабочем ходу машины и по полости 14 секционной
5 направляющей 15. что исключает влияние геометрии элементов сцепления при перекосах комбайна на направляющей в любом направлении. Кроме того, соединение планок 7 сферическими шарнирами со штоками
0 4 и 5 гидродомкратов 1 и 2 и соединение планок 7 и 11 с промежуточными парал лельными звеньями 13 равной длины сферическими шарнирями 10 исключает влияние как перекосов комбайна на направляющей
5 15, так и погрешностей изготовления как продольной полости 14 секционной направляющей Ifj, так и планок 7 и 11. что приводит к поиышению надежности и долговечности тягового органа в целом. Использование в
0 механизмах зяхватов пружин 9, размещенных между планкями 7 и 11. обеспечивает немедленный контакт указанных планок с секционной направляющей 15, что исключает проскальзывание их по полости 14 и на5 дежное сцепление с направляющей 15 в перпый же момент рабочего хода штоков 4 и 5 гидродомкратов 1 и 2. Использование в механизмах захватов свойств механизма параллелограмма обеспечивает поступательное
0 перемещение планок 7 и 11 в направлении друг к другу и немедленный отвод их от поверхностей (сцепления) полости 14 направляющей 15. что исключает возможность заклинивания планок в направляющей при
5 расклинивании механизмов захватов на холостом ходу.
Механизм перемещения выемочного комбайна (фиг.7- 12) включает гидродомкраты 17 и 18, шарнирно закрепленные на раме 19 корпуса комбайна, штоки 20 и 21 которых
соединены сферическими шарнирами 22 с планками 23 механизмов захватов, каждый из которых содержит планку 23, выполненную S-образно и с проемом 24 в средней части для размещения тяги 25, шарнирно соединенной с планками 26, расположенными противоположно плечам S-образной планки 23. Плечи S-рбразной планки 23 шарнирно соединены с планками 26, расположенными противоположно плечам S-образной планки 23 посредством промежуточных параллельных звеньев 27 равной длины, установленных симметрично поперечной плоскости симметрии S-образной планки 23. Оба механизма захватов в целом размещены в продольной полости (в трубе) 28 секционной направляющей 29 с возможностью взаимодействия S-образных планок 23 и планок 26 с поверхностями продольного полости 28 секционной направляющей 29, закрепленной на раме конвейера (не показана) и выполненной в виде, например,трубы с прямоугольным (фиг.9.10), круглым (фиг.11,12) или другим поперечным сечением и со сквозной продольной прорезью 30, выполненной в вертикальной или горизонтальной плоскости для прохода штоков 20 и 21 гидродомкратов 17 и 18. Между одним из плечей S-образной планки 23 с противолежащей планкой 26, например вдоль продольной оси механизма захвата, размещена пружина 31, обеспечивающая прижим планок 23 и 26 к поверхностям продольной полости 28 секционной направляющей 29. Размер h по наружным поверхностям плечей S-образной планки 23 выполнен в пределах расстояния h между поверхностями полости 28 секционной направляющей 29.
Механизм перемещения (фиг.7-12) работает следующим образом.
Механизм перемещения (фиг.7-12) включает два одинаковых механизма захва- тоз шарнирно присоединенных к штокам 20 и 21 гидродомкра-.ов 17 и 18, шарнирно прикрепленных к раме 19 корпуса комбайна и размещенных в целом в продольной полости 28 трубы секционной направляющей 29.
Для движения комбайна, например, слева направо по стрелке Vn от гидропривода комбайна, содержащего гидрораспреде- лительный механизм (не показаны), жидкость подается в заштоковую полость полость гидродомкрата 17 и штоковую полость гидродомкрата 18. При этом шток 20 гидродомкрата 17 перемещается справа налево по стрелке А, перемещает соединенную с ним посредством сферического шарнира 22 S-образную планку 23 левого (по фиг.7) механизма захвата справа налево.
При этом промежуточные параллельные звенья 27 равной длины, шарнирно соединенные с нижней (по фиг.7 и 8) планкой 26, шарнирно соединенной в свою очередь тягой 25, расположенной в проеме 24, с верхней (по фиг.7 и 8) планкой 26 поворачиваются соответственно относительно нижней и верхней планок 26 против и по часовой стрелке и заклинивают планку
0 23 и обе планки 26 в продольной полости 28 трубы секционной направляющей 29, закрепленной на раме конвейера (не показана) за счет того, что при повороте промежуточных параллельных звеньев 27
5 равной длины в противоположных направлениях планки 23 и 26 распираются и прижимаютсясвоиминаружнымиповерхностями к соответствующим поверхностям продольной полости 28 секционной
0 направляющей 29. Причем все происходит в первый же момент начала движения штока 20, так как планки 23 и 26 находятся под действием пружины 31, прижимающей их к поверхностям полости 28. Механизм захва5 та (левый по фиг.7) останавливается, останавливая шток 20, соединенный с S-образной планкой 23 механизма захвата сферическим шарниром 22, а цилиндр домкрата 17, шарнирно закрепленный на раме
0 19 корпуса комбайна, перемещается относительно штока 20 и перемещает раму 19 корпуса комбайна слева направо по стрелке Vn.
В то же время жидкость, поступающая
5 в штоковую полость гидродомкрата 21, шарнирно закрепленного на раме 19 корпуса комбайна, перемещает шток 21 слева направо по стрелке Б, которой свободно перемещается по сквозной продольной прорези
0 30,выполненной в стенке трубы секционной направляющей 29 в вертикальной или горизонтальной плоскости в зависимости от расположения гидродомкратов 17 и 18относительно секционной направляющей 29,
5 Шток 21, соединенный сферическим шарниром 22 с S-образной планкой 23 второго (правого на фиг.7) механизма захвата той же конструкции, что и описанный выше левый механизм захвата, перемещает S-образную
0 планку 23 также слева направо. Эта планка 23 поворачивает промежуточные параллельные звенья 27 равной длины относительно нижней и верхней планок 26 (по фиг.7) соответственно по часовой и против
5 часовой стрелки. Планка 23 и обе планки 26 освобождаются от распорного усилия звеньев 27, пружина 31 при этом сжимается, а между наружными поверхностями S-образной планки 23 и обеих планок 26 и поверхностями продольной полости 28
секционной направляющей 29 образуется зазор и правый (по фиг.7) механизм захвата в целом свободно перемещается по продольной полости 28 секционной направляющей 29 совместно со штоком 21 гидродомкрата 18 о направлении стрелки Б. При этом вследствие разности обьемов в штоковой и заштоковой полостях гидродомкратов 17 и 18 перемещение штока 21 происходите большей скоростью, чем штока 20 относительно цилиндра гидродомкрата 17, т.е. до момента остановки цилиндра гидродомкрата 17: перемещающего раму 19 корпуса комбайна в направлении Vn, шток 21 гидродомкрата 18 совместно со своими механизмом захвата возвращается в исходное для рабочего хода (подачи машины) положение. Подачей жидкости в заштоковую полость гидродомкрата 18 производится выдвижение штока 21 справа налево и заклинивание правого механизма захвата п полости 28 трубы секционной направляющей 29 до момента остановки цилиндра гид- родомкрата 17, что обеспечивает безостановочную подачу выемочного комбайна в направлении Vn. По вступлении в работу гидродомкрата 18 и правого (по фиг.7) механизма захвата шток 20 гидродомкрата 17 подачей жидкости в штоковую полость перемещается слева направо, расклинивая описанным способом левый (по фиг.7) механизм захвата в продольной полости 28 секционной направляющей 29, и свободно перемещает его по указанной полости трубы слева направо до исходной для рабочего хода позиции. Затем цикл повторяется,
Плечи S-образных планок 23 и планки 26 механизмов захватов, к которым присоединяются посредством сферических шарниров 22 штоки 20 и 21 гидродомкратоо 17 и 18, могут быть выполнены с приливами, в которых располагаются сферические шарниры 22 . При этом приливы (не обозначены) размещаются в сквозной продольной прорези 30 секционной направляющей 29.
Для смены направления движения комбайна штоки 20 и 21 гидродомкратов 17 и 18 при монтаже отсоединяют от S-образных планок 23 механизмов захватов и присоединяют к верхним (по фиг.8) планкам 26 посредством сферических шарниров 22. Кроме того, комбайн может быть оснащен дополнительно двумя механизмами захватов и двумя гидродомкратями, т.е. может содержать четыре гидродомкрага и четыре механизма захватов (что вполне оправдано на тяжелых комбайнах дня выемки пластов до5м), которые попарно будут работать при перемещении комбайна в одном, а затем в
другом направлении. Лри этом необходимо лишь выключать из работы посредством гидросистемы пару механизмов, которая предназначена для работы в обратном направлении.
В предлагаемой конструкции механизма перемещения выемочного комбайна отсутствует относительное движение звеньев механизмов захватов на рабочем ходу ма0 шины и относительное движение планок механизмов захватов по секционной направляющей, что исключает влияние геометрии элементов сцепления при перекосах комбайна на секционной направляющей в
5 любом направлении, а соединение между собой звеньев механизмов захватов и последних со штоками гидродомкратов сферическими шарнирами исключает влияние как перекосов комбайна на направляющей, так
0 и погрешностей изготовления продольной полости секционной направляющей и самих звеньев механизмов захватов, что повышает долговечность и надежность тягового органа в целом. Использование в механизмах
5 захватов свойств механизма параллелограмма обеспечивает поступательное перемещение планок 23 и 26 в направлении друг от друга при заклинивании и в направлении друг к другу при расклинивании механизмов
0 захватов в продольной полости 28 секционной направляющей 29, что исключает закли- нивание планок механизмов в направляющей на холостом ходу. Формула изобретения
51. Механизм перемещения выемочного
комбайна, включающий гидропривод с гидрораспределительным механизмом и гид- родомкр.этзми, шарнирно связанными с рамой корпуса и механизмами захватов с
0 возможностью взаимодействия с секционной направляющей, закрепленной на раме конвейера, отличающийся тем, что, с целью повышения надежности работы, секционная направляющая выполнена в ви5 де трубы со сквозной продольной прорезью, а механизмы захватов расположены в полости трубы секционной направляющей с возможностью взаимодействия с поверхностями этой полости.
02. Механизм по п.1, о т л и ч а ю щ и и с я тем, что каждый механизм захвата выполнен в виде двух противоположно установленных планок, шарнирно соединенных между собой посредством промежуточных
5 параллельных звеньев равной длины, а между планками поперечно к ним размещены пружины сжатия, причем расстояние между поверхностями полости трубы секционной направляющей выполнено меньше, чем расстояние между наружными поверхностями
планок в положении их, перпендикулярном промежуточным параллельным звеньям.
3. Механизм по п.1,отличающийся тем, что каждый механизм захвата выполнен в виде S-образной планки, тяги, шэр- нирно связанной с планками, расположенными противоположно плечам S-образной планки и соединенными с этими плечами посредством промежуточных параллельных звеньев равной длины, уста0
новленных симметрично поперечной плоскости симметрии S-образной планки, причем S-образная планка присоединена посредством сферического шарнира к штоку гидродомкрата и имеет проем в средней части для размещения тяги, а одно из плечей S-образной планки и противолежащая планка вдоль продольной оси механизма захвата связаны между собой посредством пружины.



| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм перемещения выемочного комбайна | 1986 |
|
SU1666699A1 |
| Тормозное устройство выемочного комбайна | 1986 |
|
SU1666702A1 |
| Тормозное устройство выемочного комбайна | 1986 |
|
SU1666703A1 |
| Тормозное устройство выемочного комбайна | 1986 |
|
SU1689609A1 |
| Тормозное устройство выемочного комбайна | 1986 |
|
SU1411466A1 |
| Механизм перемещения горного комбайна | 1987 |
|
SU1613603A1 |
| Тормозное устройство выемочного комбайна | 1986 |
|
SU1425320A1 |
| Механизм перемещения выемочного комбайна | 1985 |
|
SU1310518A1 |
| Механизированная крепь для отработки крутых пластов угля | 1979 |
|
SU899999A1 |
| Механизированная крепь | 1988 |
|
SU1765443A1 |



Изобретение относится к механизации выемки полезных ископаемых очистными комплексами и агрегатами и повышает надежность работы. Механизм перемещения выемочного комбайна включает гидропривод с гидрораспределительным механизмом и гидродомкратами (ГД) 1,2, закрепленными на раме 3 корпуса комбайна. Штоки ГД 1, 2 соединены шарнирами 6 С механизмами захватов, взаимодействующими с секционной направляющей 15. Последняя выполнена в виде трубы со сквозной продольной прорезью 14. Каждый механизм захвата выполнен в виде двух противоположно установленных планок 7 и 11 с гнездами для размещения пружин сжатия. Пружины обеспечивают прижим планок 7 и 11 к поверхностям продольной прорези 14 направляющей 15. Подачей жидкости в ГД 2 производится выдвижение штока 5 справа налево и заклинивание правого механизма захвата в полости 14 до момента остановки ГД 1. Это обеспечивает подачу комбайна в направлении Vn , Обратное перемещение комбайна можно осуществить путэм изменения наклона промежуточных параллельных звеньев 13 механизмов захватов при монтаже их в прорези 14 секционной направляющей 15. 2 з.п. ф-лы, 12 ил. (Л С о ел го ел
7 11 9 W 7J
Фиг. 2
15
Ю 12 Фиг.З
Ti
15
13 13 11
ю
10
10
w
10
Фиг. 5
12
6z sz a
9Z ZZ
ч
СШЖ5
#IZ
01
И
Lznd
92 SZ 91 ZZ
и
I I
02 Ј1
IfrSZSQl
26Jf
Фиг.8
2627
29
27
26 Фм.9
И
Ч и
29 j; Фиг.Ю
23
26
Фиг. 11
22
Фиг. 12
| Механизм подачи горных комбайнов | 1977 |
|
SU693003A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Дверной замок, автоматически запирающийся на ригель, удерживаемый в крайних своих положениях помощью серии парных, симметрично расположенных цугальт | 1914 |
|
SU1979A1 |
| Механизм подачи выемочной машины | 1974 |
|
SU613102A1 |
| кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Бесцепные системы подачи зарубежных очистных комбайнов, Экспресс-информация, вып | |||
| Пишущая машина | 1922 |
|
SU37A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
