(Л
Р/т
4 Jf
4 СХ 4
X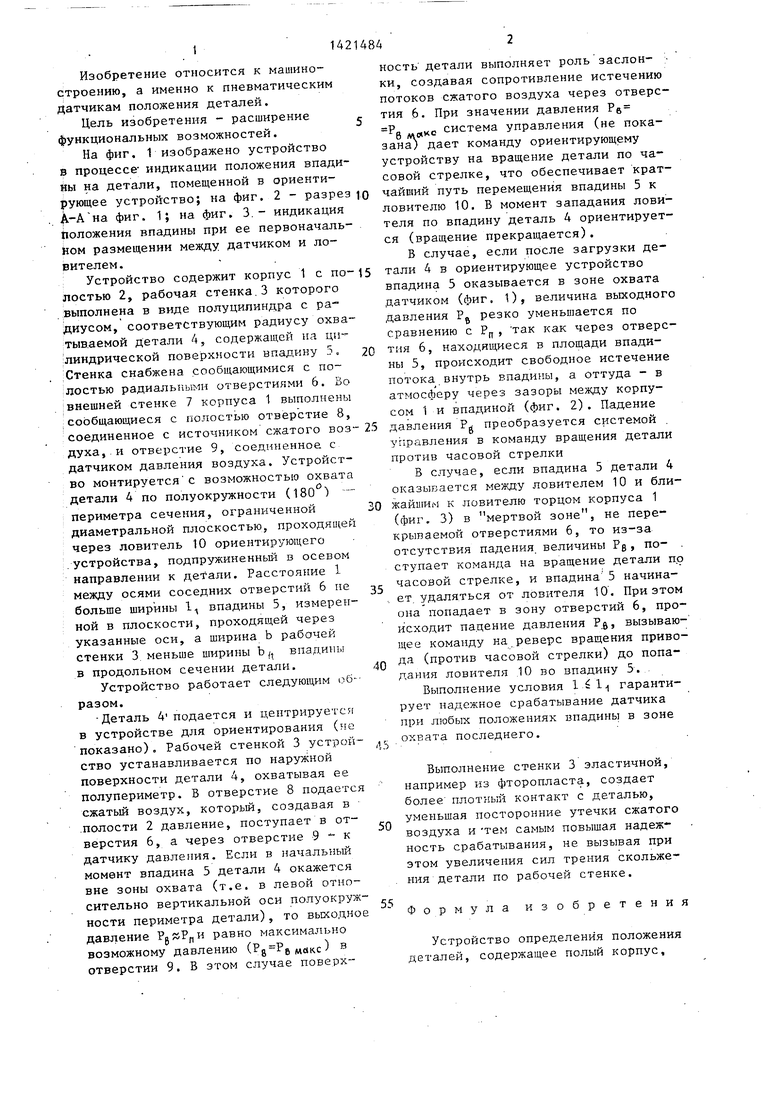
| название | год | авторы | номер документа |
|---|---|---|---|
| РОТОРНЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ С НЕПОСРЕДСТВЕННЫМ ВПРЫСКОМ ТОПЛИВА В КАМЕРУ СГОРАНИЯ - SNS | 2020 |
|
RU2749935C1 |
| Ориентирующее устройство | 1983 |
|
SU1121121A1 |
| Захватная головка манипулятора | 1986 |
|
SU1342727A1 |
| Устройство для ориентации и сборки деталей | 1987 |
|
SU1414638A1 |
| Акустоэлектронный датчик угла поворота | 1987 |
|
SU1483250A1 |
| Станок для заточки резцов | 1980 |
|
SU1085769A1 |
| Устройство для останова и фиксации вала в заданном угловом положении | 1986 |
|
SU1400849A1 |
| Устройство для автоматической сборки катушки с сердечниками | 1985 |
|
SU1255356A1 |
| Устройство для надевания трубок на жгуты проводов | 1988 |
|
SU1636877A1 |
| Устройство для сборки | 1985 |
|
SU1315212A1 |
Изобретение относится к области машиностроения, а именно к пневматическим датчикам положения деталей. Целью изобретения является расширение функциональных возможностей. Для этого рабочая стенка 3 корпуса 1 выполнена эластичной в виде полуцилиндра и на ней выполнены дополнительные отверстия 6. Полость 2 корпуса 1 сообщена с источником сжатого воздуха и отверстиями 8 и 9 с датчиком давления воздуха. Устройство рабочей стенкой 3 устанавливается на детали 4, имеющей впадину 5, и подключается к источнику сжатого воздуха. По перепаду давления на входу устройства в отверстии 8 и на выходе в отверстии 9 определяют положение впадины 5 и задают вращение детали 4 до совмещения впадины 5 с ловителем 10 по кратчайшему расстоянию. 3 ил.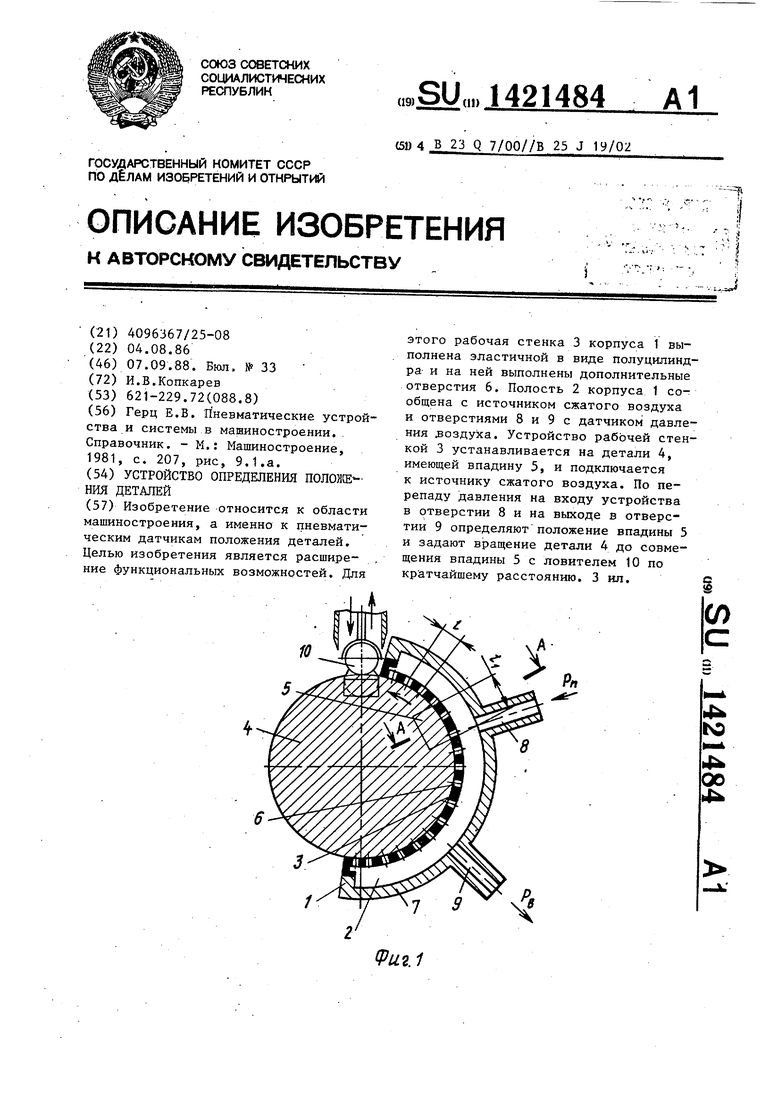
(Риг.1
Изобретение относится к машиностроению, а именно к пневматическим датчикам положения деталей.
Цель изобретения - расширение функциональных возможностей.
На фиг, 1 изображено устройство в процессе- индикации положения впади йы на детали, помещенной в ориентирующее устройство; на фиг. 2 - разре А-А на фиг. 1; на фиг. 3,- индикация положения впадины при ее первоначальном размещении между датчиком и ловителем.
Устройство содержит корпус 1 с полостью 2, рабочая стенка.3 которого .выполнена в виде полуцилиндра с радиусом, соответствующим радиусу охва тыв.аемой Детали 4, содержащей иа ци- ;линдрической поверхности впадину 5. Стенка снабжена .сообщающимися с по- лостью радиальными отверстиями 6. Во ; внешней стенке 7 корпуса 1 выполнены ;сообщающиеся с полостью отверстие 8, :соединенное с источником сжатого воздуха,- и отверстие 9, соединенное с датчиком давления воздуха. Устройство монтируется с возможностью охвата детали 4 по полуокружности (ТВО) - периметра сечения, ограниченной диаметральной плоскостью, проходяи ей через ловитель 10 ориентирующего .устройства, подпружиненный в осевом направлении к делали. Расстояние 1 между осями соседних отверстий 6 не больше ширины 1 впадины 5, измеренной в плоскости, проходящей через указанные оси, а ширина b рабочей стенки 3. меньше ширины b |, впадины в продольном сечении детали.
Устройство работает следующим 1.6- разом.
Деталь 4 подается и центрируется в устройстве для ориентирования (не показано). Рабочей стенкой 3 устрсяг- ство устанавливается по наружной поверхности детали 4, охватывая ее полупериметр. В отверстие 8 подается сжатый воздух, который, создавая в .полости 2 давление, поступает в отверстия 6, а через отверстие 9 к датчику давления. Если в начальный момент впадина 5 детали 4 окажется вне зоны охвата (т.е. в левой относительно вертикальной оси полуокружности периметра детали), то выходное давление равно максимально возможному давлению (Pg PeMctKc) отверстии 9. В этом случае поверх
5
0
5
5
0
5
0
5
ность детали выполняет роль заслон- ки, создавая сопротивление истечению потоков сжатого воздуха через отверстия 6. При значении давления Рб Ра д,о(кс система управления (не пока- зана дает команду ориентирующему устройству на вращение детали по часовой стрелке, что обеспечивает кратчайший путь перемещения впадины 5 к ловителю 10. В момент западания ловителя по впадину деталь 4 ориентируется (вращение прекращается).
В случае, если после загрузки детали 4 в ориентирующее устройство впадина 5 оказывается в зоне охвата датчиком (фиг, 1) величина выходного давления Р резко уменьшается по сравнению с Р,, , так как через отверстия 6, находящиеся в площади впадины 5, происходит свободное истечение потока внутрь впадины, а оттуда - в атмосферу через зазоры между корпусом 1 и впадиной (фиг. 2). Падение давления Pg преобразуется системой уг1равления в команду вращения детали против часовой стрелки
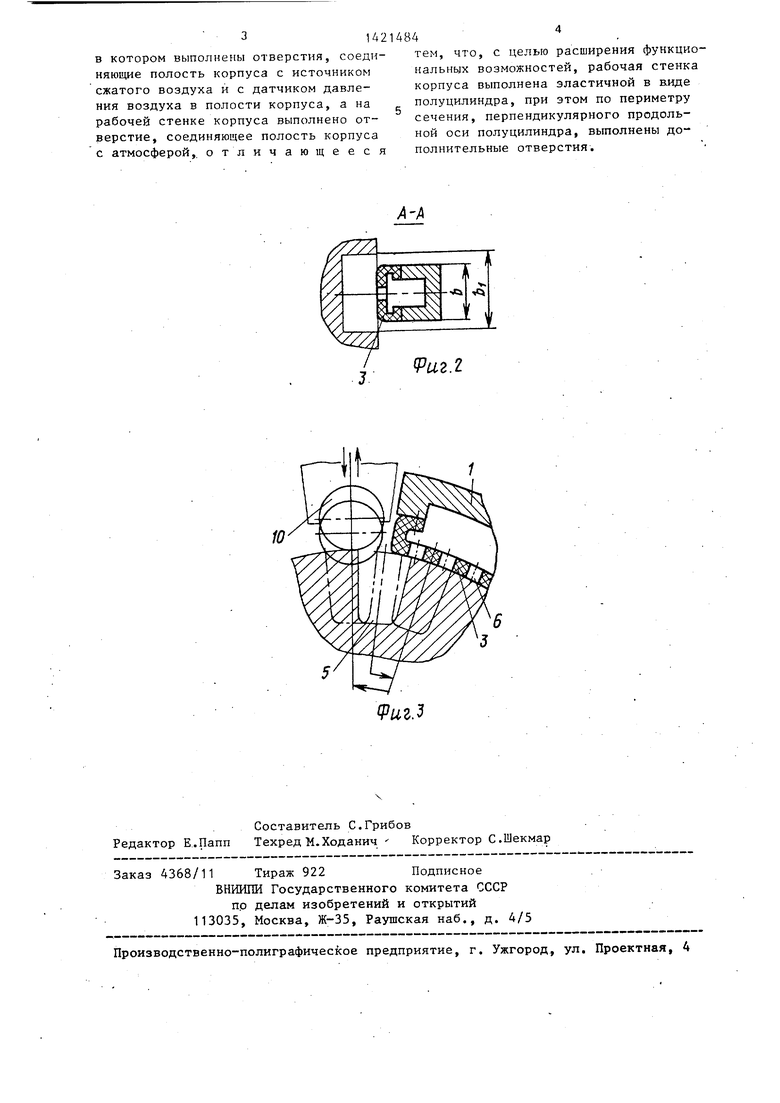
В случае, если впадина 5 детали 4 оказывается между ловителем 10 и ближайшим к ловителю торцом корпуса 1 (фиг, 3) в мертвой зоне, не перекрываемой отверстиями 6, то из-за отсутствия падения величины Pg, по- . ступает команда на вращение детали по часовой стрелке, и впадина 5 начинает, удаляться от ловителя 10. При этом она попадает в зону отверстий 6, происходит па.цение давления Pg, вызываю- 1цее команду на реверс вращения привода (против часовой стрелки) до попадания ловителя .10 во впадину 5. .
Выполнение условия ., гарантирует надежное срабатывание датчика при любых положениях впадины в зоне охвата последнего.
Выполнение стенки 3 эластичной, например из фторопласта, создает более плотный контакт с деталью, уменьшая посторонние утечки сжатого воздуха и тем самым повышая надежность срабатывания, не вызывая при этом увеличения сил трения скольжения детали по рабочей стенке.
Формула изобретения
Устройство определения положения деталей, содержащее полый корпус.
в котором выполнены отверстия, соединяющие полость корпуса с источником сжатого воздуха и с датчиком давления воздуха в полости корпуса, а на рабочей стенке корпуса выполнено отверстие, соединяющее полость корпуса с атмосферой, отличающееся
тем, что, с целью расширения функциональных возможностей, рабочая стенка корпуса выполнена эластичной в владе полуцилиндра, при этом по периметру сечения, перпендикулярного продольной оси полуцилиндра, выполнены дополнительные отверстия.
иг.г
Vuz.
| Герц Е.В | |||
| Пневматические устройства и системы в машиностроении. | |||
| Справочник | |||
| - М.: Машиностроение, 1981, с | |||
| Станок для изготовления из дерева круглых палочек | 1915 |
|
SU207A1 |
