Изобретение относится к станкостроению и может быть использовано для ориентации заготовок в загрузочных устройствах станКов-автомаТОВ г.
Известно ориентирующее устройство, содержащее установленный в корпусе на оси с возможностью вргицения диск с расположенным в его радиальном гнезде захватом, привод вращения, щуп, установленный с возможностью взаимодействия с заготовкой, и лотки ля подвода и отвода заготовок T.
Недостатками известного устройства являются сложность конструкции и невозможность ориентации деталей различных типоразмеров.
Цель изобретения - расширение технологических возможностей устройства за счет обеспечения ориентации деталей различных типоразмеров и упрощение конструкции.
Поставленная цель достигается тем, что в ориентирующем устройстве, содержащем установленный в корпусе на оси с возможностью вращения диск с расположенным в его радиальном гнезде захватом, привод вращения иска, щуп, установленный с возможностью взаимодействия с заготовкой, и лотки для подвода и отвода заготоок, захват закреплен на оси диска ерпендикулярно к ней с возможностью оворота и снабжен приводом, выполненным в виде пружины сжатия, уста-г новленной в. расточке оси диска и свяанной с ней и захватом гибкой нити, а в корпусе на пути поворота захвата от лотка к лотку выполнено окно, при этом щуп установлен на штоке введенного в устройство силового цилиндра и снабжен датчиком контроля положения детали, электрически связанным приводом вращения диска.
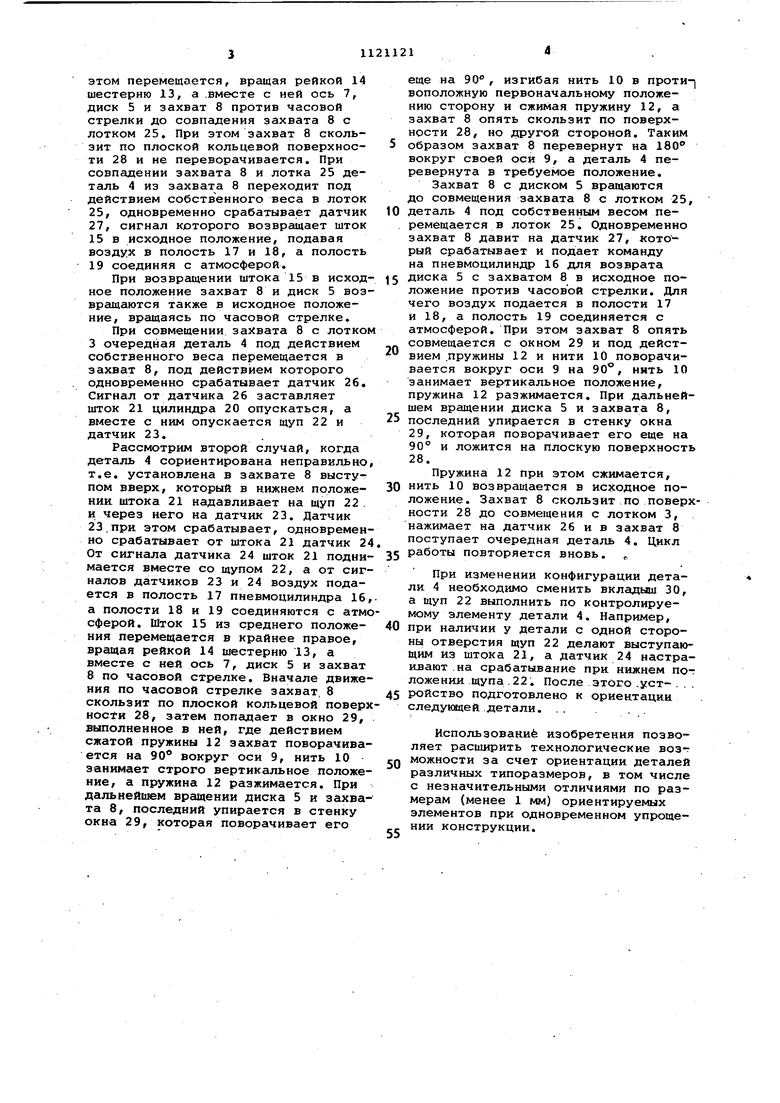
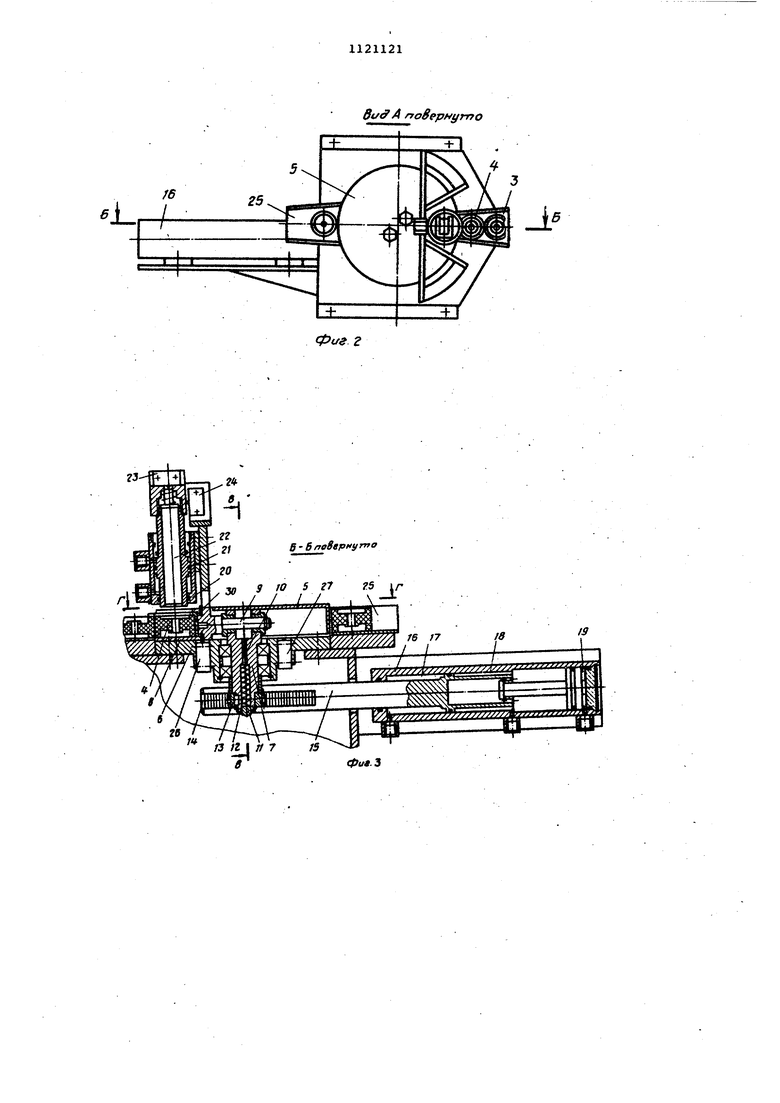
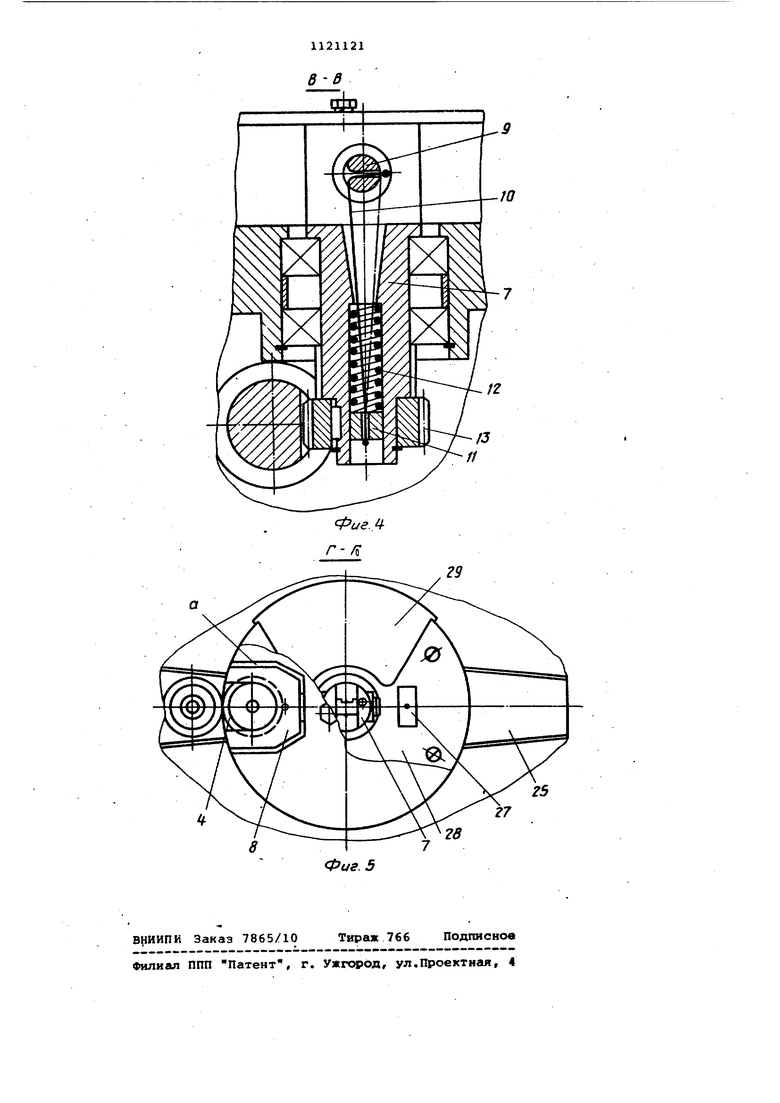
На фиг. 1 изображено предлагаемое устройство с вибробункером, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2; на фиг. 4 - разрез В-В на фиг. 3; на фиг. 5 - разрез Г-Г на фиг. 3.
Ориентирующее устройство 1 установлено под углом на одном столе с вибробункеррм 2, подающий лоток которого совмещен с лотком 3 для подвода деталей 4. Устройство 1 имеет диск 5, закрепленный жестко на вращающейся в корпусе 6 оси 7 и имекядий радиальное гнездо и , в котором размещен захват 8, имеющий консольное продолжение в виде оси 9, установленной с возможностью вращения в оси -7 диска 5. В горизонтальнее отверстие оси 9 вставлена гибкая нить 10, соединенная через втулку 11 с сжатой пружиной 12, установленной соосно и внутри оси 7, на которой еще жестко установлена шестерня 13, находящаяся в зацеплении с зубчатой
рейкой 14, выполненной на штоке 15 пневмоцилиндра 16. Шток 15 имеет три фиксированных дискретных положения, определяемые подачей воздуха в полости 17,18 и 19.Пневмоципиндр 16 закреплен на корпусе 6, на ко-, тором крепится также пневмоцилиндр 20, в штоке 21 которого установлен с возможностью перемещения щуп 22, взаимодействующий с. датчиком 23,
установленным на штоке 21. Пневмоцилиндр 20 установлен с возможностью контакта штока 21 и щупа 22 с деталью 4 i
Крайнее нижнее положение штока 21
ограничено датчиком 24, закрепленным на корпусе 6. Три фиксированных положения штока 15 соответствуют двум положениям захвата 8. Одно положение соответствует среднему положению штока 15, когда захват 8 совмещен с лотком 3 для подвода деталей, второе положение - когда захват 8 совмещен с лотком 25 для отвода деталей 4, закрепленным на корпусе 6 диаметрально лотку 3.
в этих двух положениях захват 8 взаимодействует соответственно с датчиками 26 и 27, установленными в корпусе 6. Датчики 23, 24 и 26, 27 обеспечивают последовательность работы
пневмоцилиндров 20 и, 16 через пульт управления.
Захват 8 постоянно скользит по кольцевой плоской поверхности 28, в которой выполнено окно 29, обеспе ч эющее по габаритам возможность поворота захвата 8 на 180. Захват 8 снабжен вкладышем 30, повторяющим наружную конфигурацию ориентируемой детали 4.
Устройство работает следукяцим образом.
Деталь 4 вибробункера 2 по наклон ному лотку попадает в .лоток 3 устройства 1, а далее в совмещенный с
ним захват 8. Захват 8 лежит на площадке и давит на датчик 26. Сигнал от датчика 26 заставляет через пульт управления шток 21 пневмоцилиндра 20 опускаться, а вместе с ним опускается щуп 22 и датчик 23. При касании штоком 21 детали 4 датчик 24 срабатывает, а датчик 23 срабатывает или не срабатывает, что зависит от положения детали 4 в захвате 8.
Возможны два случая. Первый случай, когда деталь 4 установлена в захвате 8 выступом вниз, т.е. правильно сориентирована. Тогда при касании штоком 21 детали 4 она не
надавливает на щуп 22, и датчик 23 не срабатывает. Под действием сигнала от датчика.24 шток 21 поднимается вместе со щупом 22 и датчиком 23, воздух подается в полости 18 и 19, а полость 17 пневмоцилиндра 16 соединяется с атмосферой. Шток 15 при
этом перемещается, вращая рейкой 14 шестерню 13, а .вместе с ней ось 7, диск 5 и захват 8 против часовой стрелки до совпадения захвата 8 с лотком 25. При этом захват 8 скользит по плоской кольцевой поверхности 28 и не переворачивается. При совпадении захвата 8 и лотка 25 деталь 4 из захвата 8 переходит под действием собственного веса в лоток 25, одновременно срабатывает датчик 27, сигнал которого возвращает шток 15 в исходное положение, подавая воздух в полость 17 и 18, а полость 19 соединяя с атмосферой.
При возвращении штока 15 в исходное положение захват 8 и диск 5 возвращаются также в исходное положение, вращаясь по часовой стрелке.
При совмещении захвата 8 с лотком 3 очередная деталь 4 под действием собственного веса перемещается в захват 8, под действием которого одновременно срабатывает датчик 26. Сигнал от датчика 26 заставляет шток 21 цилиндра 20 опускаться, а вместе с ним опускается щуп 22 и датчик 23..
Рассмотрим второй случай, когда деталь 4 сориентирована неправильно, т.е. установлена в захвате 8 выступом вверх, который в нижнем положении штока 21 надавливает на щуп 22. и через него на датчик 23. Датчик 23.при этом срабатывает, одновременно срабатывает от штока 21 датчик 24 От сигнала датчика 24 шток 21 поднимается вместе со щупом 22, а от сигналов датчиков 23 и 24 воздух подается в полость 17 пневмоцилиндра 16, а полости 18 и 19 соединяются с атмосферой. Шток 15 из среднего положения перемещается в крайнее правое, вращая рейкой 14 шестерню 13, а вместе с ней ось 7, диск 5 и захват 8 по часовой стрелке. Вначале движения по часовой стрелке захват, 8 скользит по плоской кольцевой поверхности 28, затем попадает в окно 29, выполненное в ней, где действием сжатой пружины 12 захват поворачивается на 90 вокруг оси 9, нить 10 занимает строго вертикальное положение, а пружина 12 разжимается. При дальнейшем вращении диска 5 и захвата 8, последний упирается в стенку окна 29, которая поворачивает его
еще на 90° , изгибая нить 10 в проти- воположную первоначальному положению сторону и сжимая пружину 12, а захват 8 опять скользит по поверхности 28, но другой стороной. Таким
образом захват 8 перевернут на 180° вокруг своей оси 9, а деталь 4 перевернута в требуемое положение. Захват 8 с диском 5 вращаются до совмещения захвата 8 с лотком 25,
0 деталь 4 под собственным весом перемещается в лоток 25. Одновременно захват 8 давит на датчик 27, кото рый срабатывает и подает команду на пневмоцилиндр 16 для возврата
5 диска 5 с захватом 8 в исходное положение против часовой стрелки. Для чего воздух подается в полости 17 и 18, а полость 19 соединяется с атмосферой. При этом захват 8 опять совмещается с окном 29 и под действием .пружины 12 и нити 10 поворачивается вокруг оси 9 на 90°, нить 10 занимает вертикальное положение, пружина 12 разжимается. При дальнейшем вращении диска 5 и захвата 8,
5 последний упирается в стенку окна 29, которая поворачивает его еще на 90 и ложится на плоскую поверхность 28.
Пружина 12 при этом сжимается,
0 нить 10 возвращается в исходное положение. Захват 8 скользит по поверхности 28 до совмещения с лотком 3, нажимает на датчик 26 и в захват 8 поступает очередная деталь 4. Цикл
5 работы повторяется вновь, f,
При изменении конфигурации детали 4 необходимо сменить вкладыш 30, а щуп 22 выполнить по контролируемому элементу детали 4. Например,
0 при наличии у детали с одной стороны отверстия щуп 22 делают выступающим из штока 21, а датчик 24 настраивают .на срабатывание при нижнем пот ложении щупа.22. После этого ,уст- .
5 РОйство подготовлено к ориентации следующей.детали.
Использование изобретения позволяет расширить технологические возт g можности за счет ориентации деталей различных типоразмеров, в том числе с незначительными отличиями по размерам (менее 1 мм) ориентируемых элементов при одновременном упрощеНИИ конструкции.
/5
i-rфие z
Bucf A rroSepHymo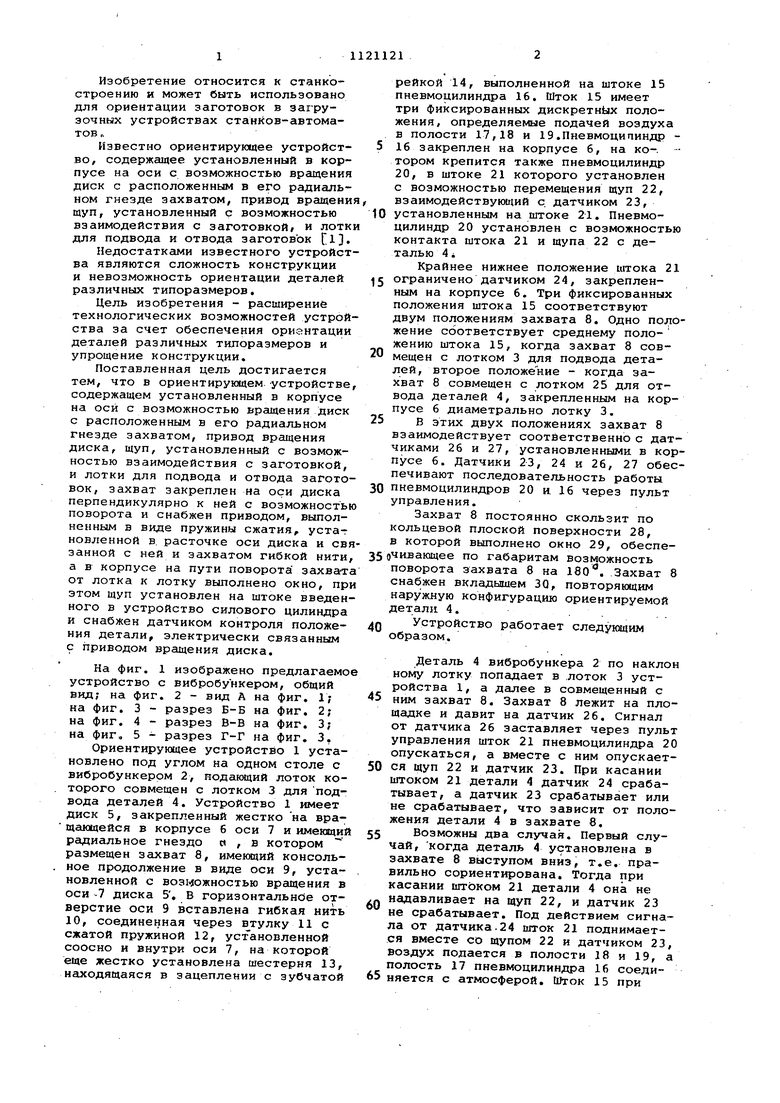
| название | год | авторы | номер документа |
|---|---|---|---|
| Загрузочное устройство | 1985 |
|
SU1278177A1 |
| АВТОМАТ ДЛЯ СБОРКИ | 1992 |
|
RU2005586C1 |
| Устройство для поштучной выдачидЕТАлЕй | 1979 |
|
SU841913A1 |
| Автомат для монтажа упругих колец | 1980 |
|
SU956223A1 |
| Автоматическая сборочная линия | 1985 |
|
SU1296350A1 |
| Автомат для сборки | 1985 |
|
SU1391857A1 |
| Устройство для ориентирования деталей | 1978 |
|
SU751574A1 |
| Загрузочное устройство к станку для обработки деталей | 1984 |
|
SU1310165A1 |
| Загрузочное устройство | 1989 |
|
SU1798111A1 |
| СС.СО!О31!АПС. Л. Лившиц|и v,:;'--.",a rrvi:!i2'\r.r>&j^aI :.,i>&^:;i.;l;-ii.Atiii .LvSiAflг* : ^ -^ =">&•! 4 -^ "^^ (" L' AC.i-'!,r>&,'i;'1vJ I LKA | 1973 |
|
SU365236A1 |
ОРИЕНТИРУЮЩЕЕ УСТРОЙСТВО, содержёццее установленный в корпусе на оси с возможностью вращения диск с расположенным в его радиальном гнезде захватом, привод вращения диска, щуп, установленный с возможноЬтью взаимодействия с заготовкой, и лотки для подвода и отвода заготовок, ртл11чающеес я тем, что, с целью расширения технологических возможностей за счет обеспечения ориентации деталей различных типоразмеров при упрощении конструкции, захват закреплен на оси диска перпендикулярно к ней с возможностью поворота и снабжен приводом, выполненнЕ м в виде пружины сжатия, установленной в расточке оси диска и связанной с ней и с захватом гибкой нити, а в корпусе на пути поворота захвата от лотка к лотку выполнено окно, при этом щуп установлен на штоке введенного в устройство силового цилиндра и снабжен датчиком контроля положения детали, электрически связанным с приводом вращения диска.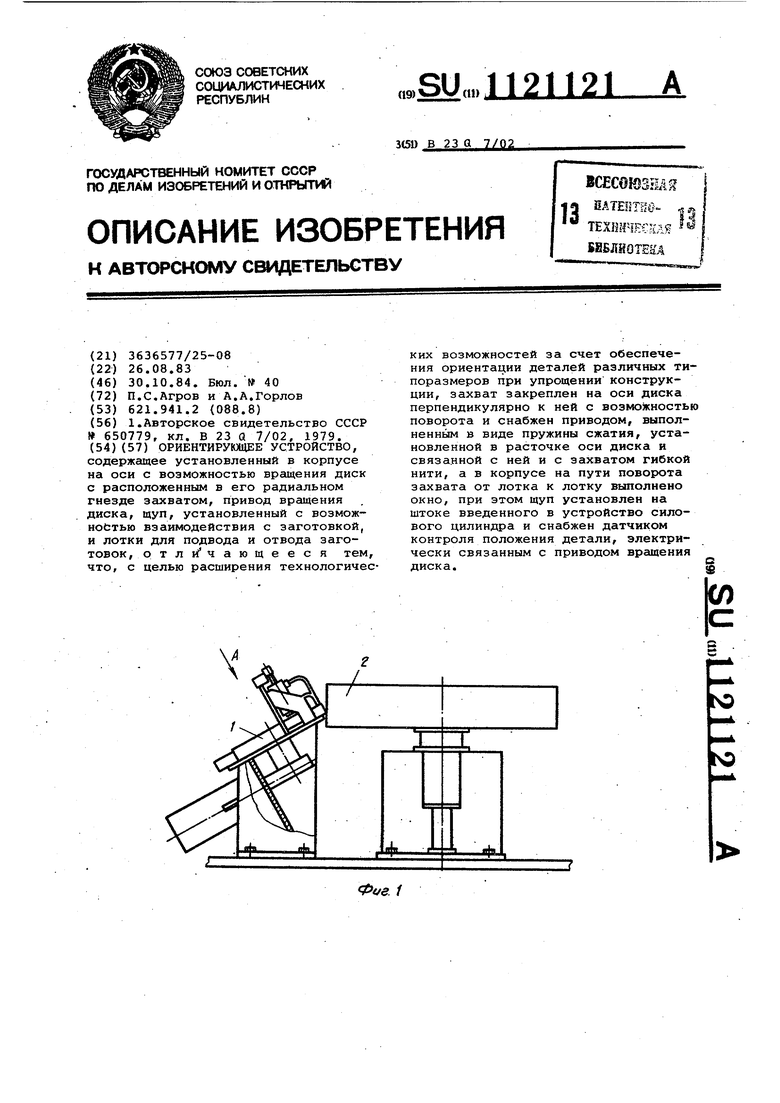
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
