3
феррозондом 6, который имеет первичную тороидальную обмотку 7 и две взаимно перпендикулярные вторичные обмотки 8 и 9. Устр-во имеет два постоянных магнита 4 и 5, установленных соответственно на М 2 и 3. Оси подвеса последних и продольная ось корпуса 1 взаимно ортогональны. Феррозонд 6 размещен между М 2 и 3 и закреплен в корпусе в плоскости, перпендикулярной его продольной оси. Направление осей подвеса М 2 и 3 совпадает с направлением вторичных
21854
обмоток феррозонда 6. Оси намагничивания магнитов 4 и 5 расположены по продольной оси корпуса 1. Смещение осей магнитов 4 и 5 . относительно обмоток 8 и 9 при наличии тока возбуждения в обмотке 7 приводит к по- яйлению на выходах в обмотках 8 и 9 сигналов, пропорциональных углам наклона И 2 и 3. Искомые зенитный и визирный углы определяют по сигналам с обмоток 8 и 9, пропорциональным углам наклона М 2 и 3. 1 з.п. ф-лы, 1 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения углаНАКлОНА СКВАжиНы | 1979 |
|
SU802534A1 |
| Преобразователь наклона скважины и поворота скважинного снаряда | 1983 |
|
SU1125364A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА, ЗЕНИТНОГО УГЛА И УГЛА МАГНИТНОГО НАКЛОНЕНИЯ | 1997 |
|
RU2131029C1 |
| Устройство для контроля параметров траектории скважины | 1975 |
|
SU555284A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ ИСКРИВЛЕНИЯ СКВАЖИНЫ И ПОЛОЖЕНИЯ ОТКЛОНИТЕЛЯ ПРИ БУРЕНИИ | 2001 |
|
RU2184845C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПОЛНОГО ВЕКТОРА МАГНИТНОГО ПОЛЯ, А ТАКЖЕ УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2218577C2 |
| БЛОК ИНКЛИНОМЕТРИЧЕСКИХ ПРЕОБРАЗОВАТЕЛЕЙ | 2007 |
|
RU2359121C1 |
| Датчик угла наклона объекта | 1990 |
|
SU1747872A1 |
| Устройство для измерения угловиСКРиВлЕНия СКВАжиН | 1979 |
|
SU832079A1 |
| Преобразователь наклона скважины и угла установки отклонителя бурового инструмента | 1982 |
|
SU1086139A1 |
Изобретение относится к области промысловой геофизики и м.б. использовано для контроля пространственной ориентации траектории скважин. Цель изобретения - повышение точности измерения. Преобразователь содержит корпус 1 с размещенными в нем двумя маятниками (М) 2 и 3 и кольцевым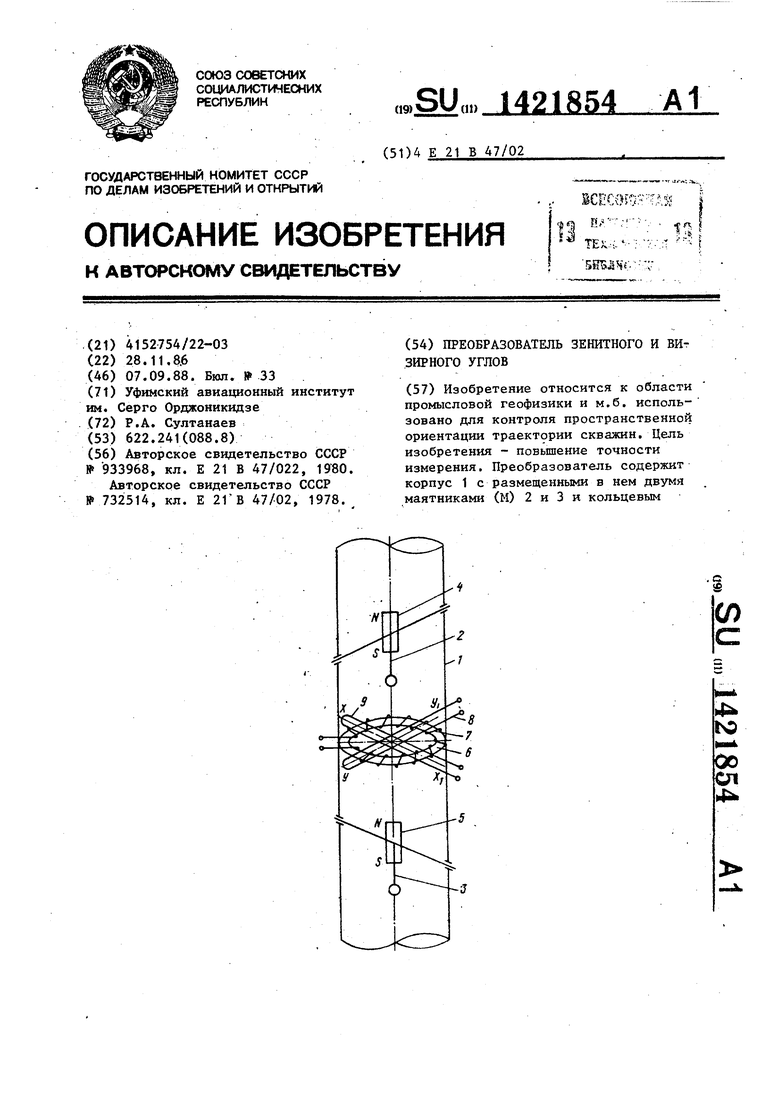
1
Изобретение относится к промысловой геофизике и может быть использовано в системах контроля пространственной ориентации траектории скважины, а также для управления буро вым инструментом.
Цель изобретения - повышение точности измерения зенитного и визирно го углов.
На чертеже приведена кинематичес кая схема преобразователя з енитного и визирного углов.
Преобразователь зенитного и визирного углов содержит корпус 1 с размещенными в .нем двумя маятниками 2 и 3, оси подвеса которых и продольная ось корпуса взаимно ортогональны На маятниках 2 и 3 установлены соответственно постоянные магниты 4 и 5. Кольцевой феррозонд 6 с первичной тороидальной обмоткой 7 и двумя взаимно перпендикулярными вторичньши обмотками В и 9 размещен между маятниками 2-й 3 и закреплен в корпусе 1 в плоскости, перпендикулярной продольной оси корпуса 1. Направление
.осей подвеса маятников 2 и 3 совпадает с направлением вторичных обмоток 8 и 9 соответстненно. Оси намагничивания постоянных магнитов 4 и 5 расположены на продольной оси корпуса 1. . . ,
Кольцевой феррозонд 6 представляет собой два дифференциальных феррозонда с общей первичной обмоткрй 7 возбзпкдения, в котором вторичная обмотка 8 является сигнальной обмоткой феррозонда, сердечниками которого являются полуэлементы кольцевого
0
5
сердечника, разделенные осью XX,, а вторичная обмотка 9 является сигнальной обмоткой феррозонда, в котором сердечники - полуэлементы, разделенные осью YY,.
Преобразователь работает следующим образом.
В начальном положении (при зенитном и визирном углах, равных нулю) оси намагничивания постоянных магнитов 4 и 5 лежат на продольной оси корпуса, и перпендикулярны плоскости кольцевого феррозонда 6. При этом сигналы с выходов вторичных обмоток в реальном исполнении минимальны.
При отклонении корпуса 1 преобразователя от вертикали на зенитный угол 0 и е го повороте вокруг про120 дольной оси на визирный угол if в конкретной точке траектории скважины маятники 2 и 3, ориентируясь по вектору ускорения свободного падения, поворачиваются вокруг своих
25 осей подвеса.
Смещение осей намагничивания постоянных магнитов 4 и 5 относительн осей симметрии вторичных обмоток 8 и 9 кольцевого феррозонда 6 при на3Q личии тока возбуждения в тороидальной первичной обмотке 7 приводит к появлению на выходах вторичных обмоток сигналов, пропорциональных углам наклона маятников. Так как ось симметрии YY, вторичной обмотки
8 перпендикулярна плоскости наклона маятника 2 и лежит в плоскости наклна маятника 3, то сигнал на ее выходе пропорционален только наклону
постоянного магнита 4, установленного на маятнике 2, и не зависит от угла наклона маятника 3, и соответственно сигнал на выходе вторичной обмотки 9 пропорционален только углу наклона постоянного магнита 5, установленного на маятнике 3.
Искомые углы (зенитный в и визирный Cf ) определяют по сигналам . с вторичных обмоток кольцевого феррозонда 6, пропорциональных углам наклона маятников 2 и 3, по известным алгоритмам
8 arctg(tgp/+ (tgA,)%
f--.s(|||),
где PI , Рг сигналы с вторичных
обмоток кольцевого фе розонда.
. Вычисление искомых углов б и tf по указанным формулам производится на поверхности с помощью ЭВМ.
Повышение точности достигается применением двух .вращающихся на ося подвеса постоянных магнитов (роторов) и одного расположенного между ними кольцевого феррозонда, выполняющего функцию общего для них статора, что не требует введения коррекции в преобразователи обработки информация с датчиков для устранения погрешности из-за неидентичности изготовления их статоров.
Искомые углы определяются по известным алгоритмам, в которых не
идентичность параметров датчиков углов проявляется только в неидентичности магнитов и сигнальных обмоток, которые легко контролируются при сборке преобразователя и существенно не изменяются в процессе эксплуатации.
Формула изобретения
15
20
лением вторичных обмоток кольцевого феррозонда.
| Устройство для определения зенитного и визирного угла в скважине | 1980 |
|
SU933968A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Датчик угла отклонения от вертикали | 1978 |
|
SU732514A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
