/ч
И
4i Ю
оо to
00
со
Йьшается из скоростей тяги 9 и ско- рости поворота рычага II, которая В своюочередь определяется криволн- 4ейной поверхностью ЕЖ конца 5 планки 4. Таким образом, скорость подвижного узла 3 плавно меняется от скорости тяги 9 до нуля, что исключает динамические удары, 5 ил.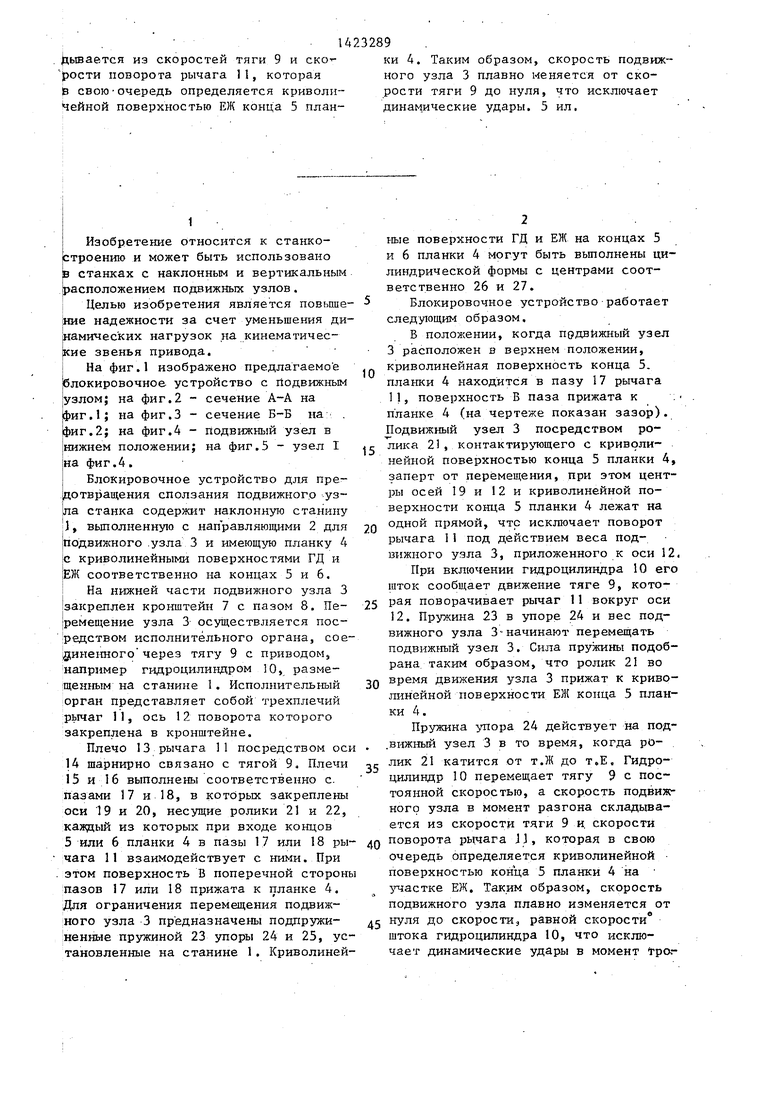
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРУЖИНОНАВИВОЧНЫЙ АВТОМАТ, ЕГО МЕХАНИЗМЫ РУБКИ, ОБРАЗОВАНИЯ УЗЛА, ПЕРЕМЕЩЕНИЯ ЗАГОТОВОК (ВАРИАНТЫ), ИХ УСТРОЙСТВА ЗАХВАТОВ, ПОДВИЖКИ, ОРИЕНТАЦИИ, ЗАЖИМА, КУЛАЧКОВЫЕ СРЕДСТВА | 2002 |
|
RU2199412C1 |
| Устройство для наклонно-строчной магнитной записи и воспроизведения | 1988 |
|
SU1582200A1 |
| Способ обвязки рулонов на барабанеМОТАлКи и уСТРОйСТВО для ЕгООСущЕСТВлЕНия | 1979 |
|
SU831666A1 |
| НИТКОШВЕЙНЫЙ АВТОМАТ | 1960 |
|
SU133461A1 |
| Транспортное средство для перевозки аварийных транспортных средств | 1991 |
|
SU1830014A3 |
| Захватное устройство для прижима балок | 1971 |
|
SU449869A1 |
| ДВИЖИТЕЛЬНО-РУЛЕВОЙ КОМПЛЕКС | 1996 |
|
RU2107642C1 |
| УБИРАЮЩИЙСЯ БАМПЕР БЛОКИРОВОЧНОГО МЕХАНИЗМА | 2013 |
|
RU2608208C2 |
| Пачковязальная машина | 1960 |
|
SU140725A1 |
| Устройство для наклонно-строчной магнитной записи и воспроизведения | 1986 |
|
SU1578759A1 |
Изобретение относится к станкостроению и может быть использовано в станках с наклонным и вертикальным расположением подвижных узлов. Целью изобретения является повышение надежности за счет уменьшения динамических нагрузок на кинематические звенья привода. При подходе подвижного узла 3 в крайнее, например верхнее, положение в тот момент, когда ролик 21 находится около точки Е на подвижный узел начинает действовать пружина 23 упора 24. Сила пру- .жины подобрана таким образом, что во время движения подвижного узла ролик 21 всегда прижат к планке 4. Гид- роцилиндр привода продолжает перемещать тягу 9 с постоянной скоростью. Под действием силы, состоящей из части веса неподвижного узла и силы пружины 23 упора 24, приложенной к оси 12, и силы, развиваемой цилиндром привода, рычаг 11 поворачивается против часовой стрелки. Скорость подвижного узла в то время, когда ролик 21 катится от точки Е до точки Ж, скла«€ (Л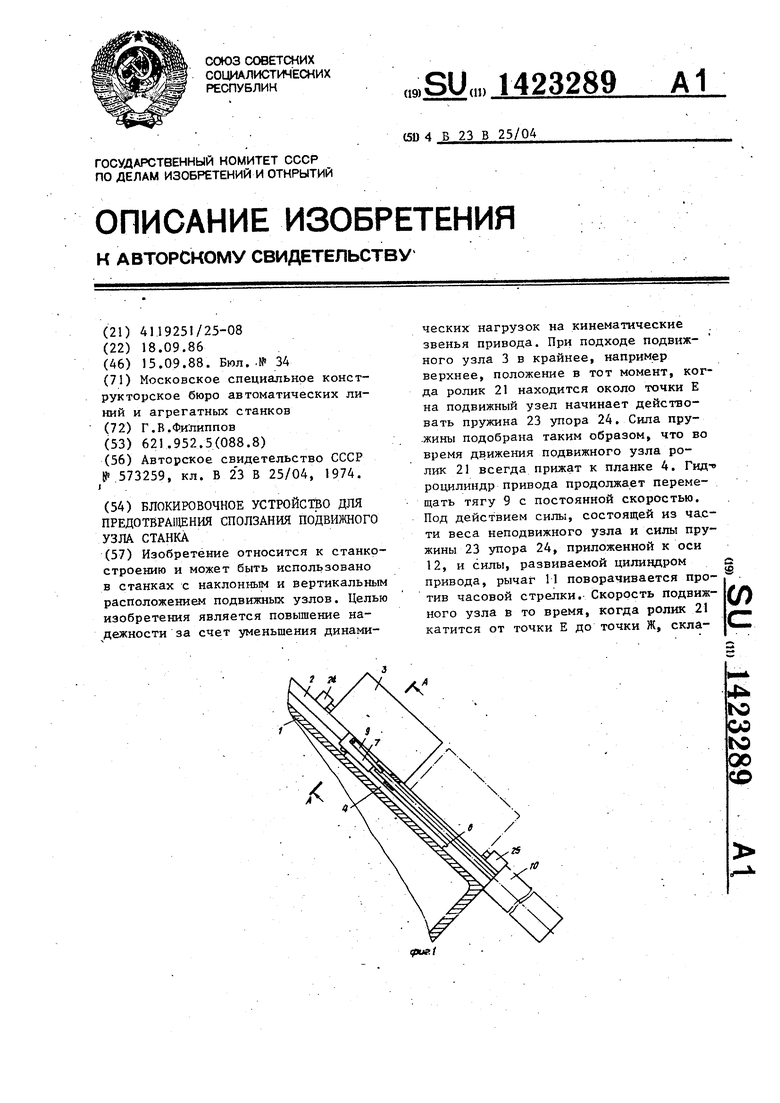
1
Изобретение относится к станкостроению и может быть использовано b станках с наклонным и вертикальным расположением подвижных узлов,
Целью изобретения является повыше|ние надежности за счет уменьшения диI
|намичес ких нагрузок на кинематичес|кие звенья привода.
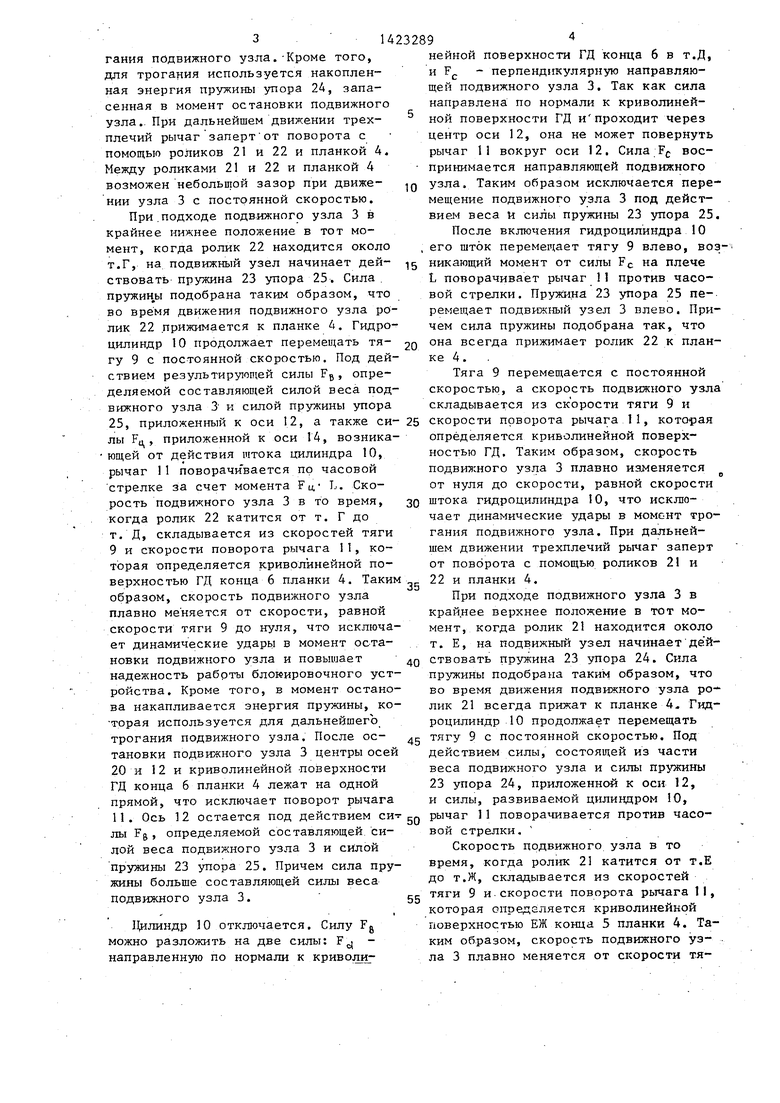
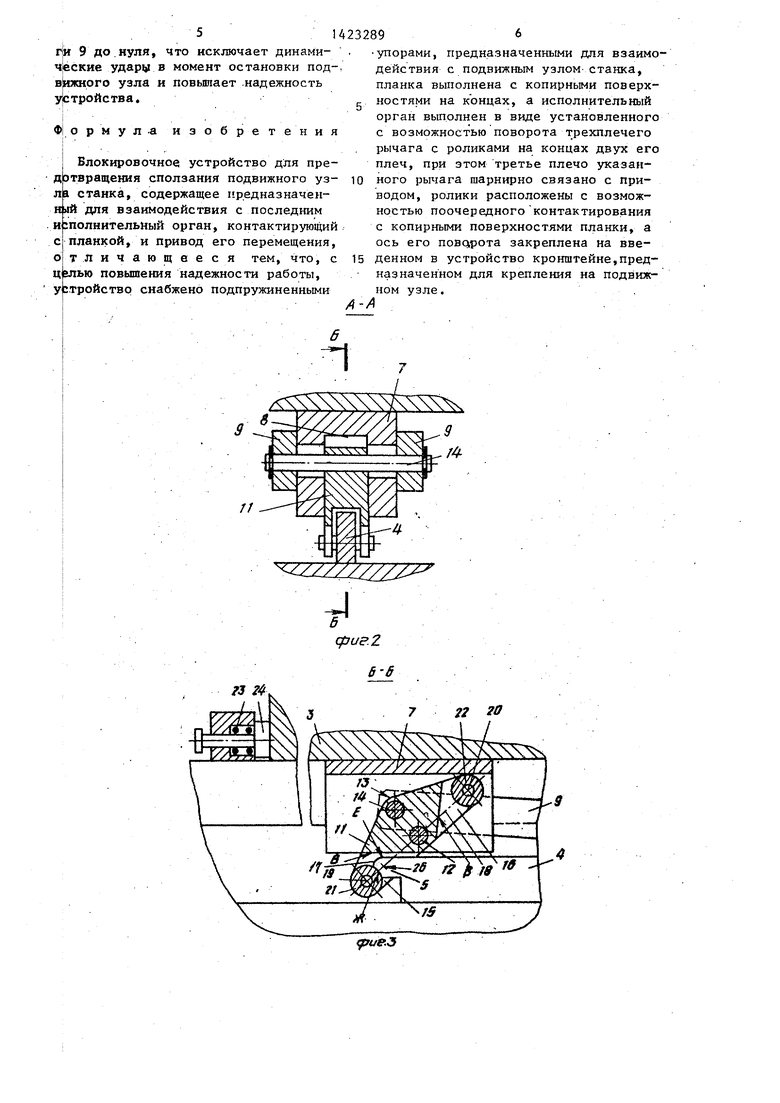
I На фиг,1 изображено предлагаемой {блокировочное устройство с Подвижным узлом; на фиг,2 - сечение А-А на ЙЬиг,; на фиг,3 - сечение Б-Б на . фиг,2; на фиг.4 - Подвижный узел в нижнем положении; на фиг,5 - узел I на фиг,4,
Блокировочное устройство для предотвращения сползания подвижного уз- |ла станка содержит наклонную станину ), вьшолненную с нап равляющими 2 для подвижного .узла 3 и имеющую планку 4 |с криволинейными поверхностями ГД и |ЕЖ соответственно на концах 5 и 6,
На нижней части подвижного узла 3 закреплен кронштейн 7 с пазом 8. Пе- ремещение узла 3 осуществляется посредством исполнительного органа, сое- динеютого через тягу 9 с приводом, Например гидроцилиндром 10, размещенным на станине 1. Исполнительный :Орган представляет собой трехплечий рь1чаг 11, ось 12 поворота которого закреплена в кронштейне.
Плечо 13 рычага 11 посредством оси
14шарнирно связано с тягой 9, Плечи
15и 16 выполнены соответственно с. пазами 17 и 18, в которых закреплены оси 19 и 20, несущие ролики 21 и 22, каядый из которых при входе концов
5 или 6 планки 4 в пазы 17 или 18 рычага 11 взаимодействует с ними. При этом поверхность В поперечной стороны пазов 17 или 18 прижата к планке 4. :Для ограничения перемещения подвижного узла 3 предназначены подпружи- ;ненные пружиной 23 упоры 24 и 25, установленные на станине 1. Криволиней
ные поверхности ГД и ЕЖ на концах 5 и 6 планки 4 могут быть вьшолнены цилиндрической формы с центрами соответственно 26 и 27.
Блокировочное устройство работает следующим образом.
В положении, когда подвижный узел 3 расположен в верхнем положении, криволинейная поверхность конца 5. планки 4 находится в пазу 17 рычага
11,поверхность В паза прижата к ; планке 4 (на чертеже показан зазор), ПодвижньЕй узел 3 посредством ро
лика 2, контактирующего с криволинейной поверхностью конца 5 планки 4, заперт от перемещения, при этом центры осей 19 и 12 и криволинейной поверхности конца 5 планки 4 лежат на
одной прямой, что исключает поворот рычага 11 под действием веса подвижного узла 3, приложенного к оси 12. При включении гидроцилиндра 10 его шток сообщает движение тяге 9, которая поворачивает рычаг 11 вокруг оси
12,Пружина 23 в упоре 24 и вес подвижного узла 3-начинают перемещать ПОДВИЖ1-ШЙ узел 3, Сила пружины подобрана таким образом, что ролик 21 во
время движения узла 3 прижат к криволинейной поверхности ЕЖ конца 5 планки 4 ,
Пружина Tiopa 24 действует на под- .вижный узел 3 в то время, когда ролик 21 катится от т,Ж до т«Е. Гидроцилиндр 10 перемещает тягу 9 с постоянной скоростью, а скорость подвияс- ного узла в момент разгона складывается из скорости тдги 9 и. скорости
поворота рычага Л, которая в свою очередь определяется криволинейной поверхностью конца 5 планки 4 на частке ЕЖ. Таким образом, скорость подвижного узла плавно изменяется от
нуля до скоростиэ равной скорости штока гидроцилиндра 10, что исключает динамические удары в момент тра
гания подвижного узла.-Кроме того, для трогания используется накопленная энергия пружины упора 24, запасенная в момент остановки подвижного узла.. При дальнейшем движении трех- плечий рычаг заперт от поворота с помощью роликов 21 и 22 и планкой А. Между роликами 21 и 22 и планкой 4 возможен небольшой зазор при движении узла 3 с постоянной скоростью. При.подходе подвижного узла 3 в крайнее нижнее положение в тот момент, когда ролик 22 находится около т.Г, на подвижный узел начинает действовать пруткина 23 упора 25. Сила. пружин,ы подобрана таким образом, что во время движения подвижного узла ролик 22 .прижимается к планке 4, Гидроцилиндр 10 продолжает перемещать тя- ГУ 9 с постоянной скоростью. Под действием результирующей силы Fg, определяемой составляющей силой веса подвижного узла 3 и силой пружины упора
25, приложенный к оси 12, а также си- 25 скорости поворота рычага 1I, которая
30
35
лы FU , приложенной к оси 14, возника- ющей от действия штока цилиндра 10, рычаг II поворачивается по часовой стрелке за счет момента FU,- L. Скорость подвижного узла 3 в то время, когда ролик 22 катится от т. Г до т. Д, складывается из скоростей тяги 9 и скорости поворота рычага 11, которая определяется криволинейной поверхностью ГД конца 6 планки 4. Таким образом, скорость подвижного узла плавно меняется от скорости, равной скорости тяги 9 до нуля, что исключает динамические удары в момент остановки подвиж1гого узла и повышает jg надежность рабрты блокировочного устройства. Кроме того, в момент останова накапливается энергия пружины, ко- торая используется для дальнейшего трогания подвижного узла. После остановки подвижного узла 3 центры осей 20 и 12 и криволинейной ловерхности ГД конца 6 планки 4 лежат на одной прямой, что исключает поворот рычага П. Ось 12 остается под действием си45
50
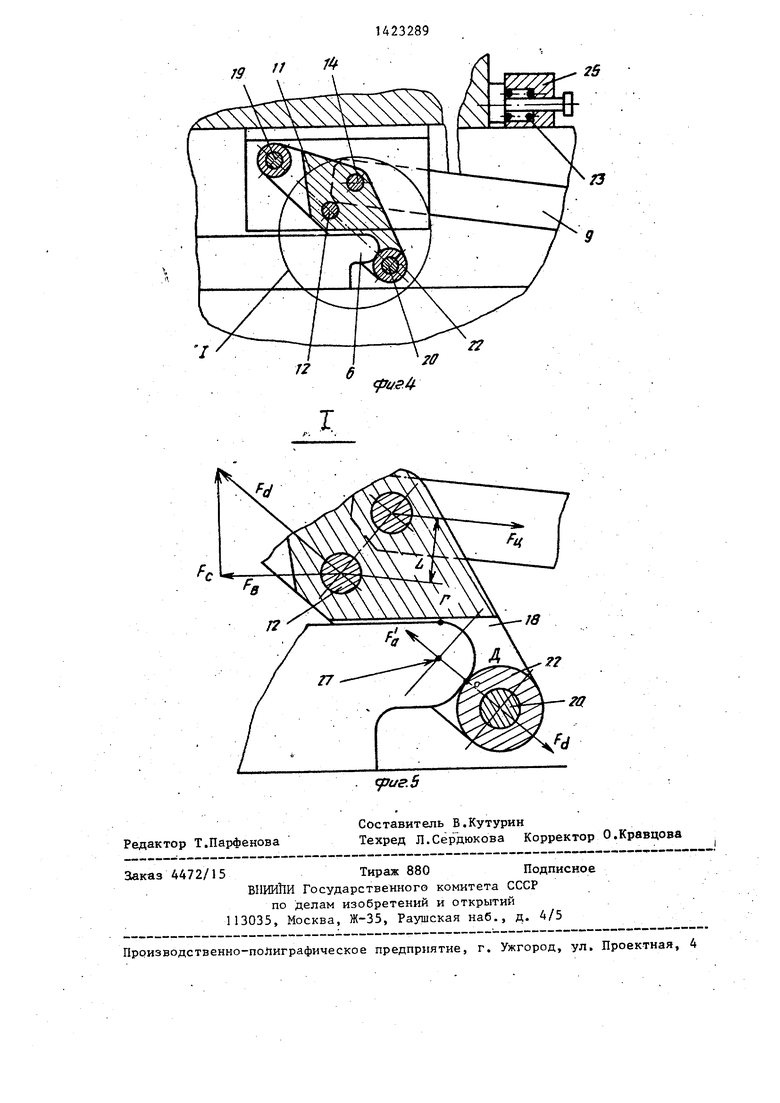
лы Fg, определяемой составляющей силой веса подвижного узла 3 и сИлой пружины 23 упора 25. Причем сила пружины больше составляющей силы веса подвижного узла 3.
1 |илиндр 10 отключается. Силу Fg можно разложить на две силы: F - направленную по нормали к криво,
нейной поверхности ГД конца 6 в т.Д, и FJ.. - перпендикулярную направляющей подвижного узла 3, Так как сила направлена по нормали к криволинейной поверхности ГД и проходит через центр оси 12, она не может повернуть рычаг 11 вокруг оси 12. Сила Р воспринимается направляющей подвижного узла. Таким образом исключается перемещение подвижного узла 3 под действием веса и силы пружины 23 упора 25.
После включения гидроцилиндра 10 , его шток перемещает тягу 9 влево, воз- никающий момент от силы FC на плече L поворачивает рычаг 11 против часовой стрелки. Пружина 23 упора 25 перемещает подвижный узел 3 влево. Причем сила пружины подобрана так, что она всегда прижимает ролик 22 к планке 4 ..
Тяга 9 перемещается с постоянной скоростью, а скорость подвижного узла складывается из скорости тяги 9 и
опрёделяется криволинейной поверхностью ГД. Таким образом, скорость подвияшого узла 3 плавно изменяется от нуля до скорости, равной скорости штока гидроцилиндра 10, что исключает динамические удары в момент трогания подвижного узла. При дальнейшем движении трехплечий рычаг заперт от поворота с помощью роликов 21 и
22и планки 4.
При подходе подвижного узла 3 в крайнее верхнее положение в тот момент, когда ролик 21 находится около т. Е, на подвижный узел начинает действовать пружина 23 упора 24. Сила пружины подобрана таким образом, что во время движения подвижного узла ро лик 21 всегда прижат к планке 4. Гидроцилиндр 10 продолжает перемещать тягу 9 с постоянной скоростью. Под действием силы, состоящей из части веса подвижного узла и силы пр жины
23упора 24, приложенной к оси 12, и силы, развиваемой цилиндром 10, рычаг I1 поворачивается против часовой стрелки.
Скорость подвижного узла в то время, когда ролтс 21 катится от т.Е до т.Ж, складывается из скоростей тяги 9 и скорости поворота рычага II, которая определяется криволинейной поверхностью ЕЖ конца 5 планки 4. Таким образом, скорость подвижного узла 3 плавно меняется от скорости тя
г 9 до.нуля, что исключает динами- удар|)1 в момент остановки под-. вЬскного узла и повьшает надежность у ртройства.
Ф|ормул.а изобретения
Блокировочное устройство для предотвращения сползания подвижного узла станка, содержащее иредназначен- Hiift для взаимодействия с последним исполнительный орган, контактирующий с планкой, и привод его перемещения, отличающееся тем, что, с целью повышения надежности работы, устройство снабжено подпружиненными
упорами, предназначенными для взаимодействия с подвшкньм узлом- станка, планка выполнена с копирными поверх- с ностями на концах, а исполнительный орган выполнен в виде установленного с возможностью поворота трехплечего рычага с роликами на концах двух его плеч, при этом третье плечо указан- 10 ного рычага гаарнирно связано с приводом, ролики расположены с возможностью поочередного контактирования с копирными поверхностями планки, а ось его поворота закреплена на вве- 15 денном в устройство кронштейне,предназначенном для крепления на подвижном узле.. )
6
sfe
з
K5
sfe
22 20
ue.S
79
п r
Редактор Т.Парфенова
fJt/ff4
fd
иг.5
Составитель В.Кутурин
Техред Л.Сердюкова Корректор О.Кравцова
| Блокировочное устройство для предотвращения сползания подвижного узла станка | 1974 |
|
SU573259A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
