Предложенное устройство предназначено для автоматического управления лиевмоподъемниками выкатной тележ;ки, которая служит для транспортировки на ией автомобиля из боксов в лифт и обратно.
Устройства автоматизации пневмолодъемниК01В известны. Однако они слолшы и недостаточно надежны, так как управление пневмоподъемниками в них осуществляется либо радиосигналами, либо специальным жонтрольным кабелем.
Предложенное устройство содержит жлапаны «К-ИЛИ, одноконтактные Клапаны, трехмембранные реле электропневмопреобразователи, тневматичеокие конечные выключатели, скользящие электрические контакты, цилиндр пневмоподъемника с воздухораспределителем, резервуар сжатого воздуха с вентилем, фильтром и задатчиками и отличается тем, что, с целью упрощения устройства и оовышения его надежности, в нем канал питания воздухораспределителя соединен через вентиль 1C резервуаром сжатого 1воздуха, .который через фильтр и задатчи1ки соединен также с каналами питания двух электропневмопреобразователей, электрические входы которых соединены со скользящими электрическими контактами, нормально открытые нневматичеокие контакты соединены с каналом литания трехмембранного реле в цепи другого преобразователя, а нормально закрытые пневматические контакты связаны с одним из входов двух элементов «К-ИЛИ, выход каждого из которых соединен со входом своего трехмембранного реле, а .выходы реле соединены с другими входами указанных элементов «К-ИЛИ и с двумя пневматическими конечными выключателями, выходы которых через третий элемент «К-ИЛИ соединены с каналами питания двух других трехмембранных реле и со входами двух одноконтактных клапанов, выходы которых через другие пневматические асонечные выключатели соединены с управляющими входами воздухораспределителя и через соответствующие четвертый и пятый элементы «К-ИЛИ связаны со входами овоих трехмембранных реле, выходы которых соединены с другими входами четвертого и пятого :Элементов «К-ИЛИ и с управляющими входами одиоконтактных клаланов в цепи другого конечного выключателя, а выходы воздухораспределителя связаны со входами пневмо цилиндра.
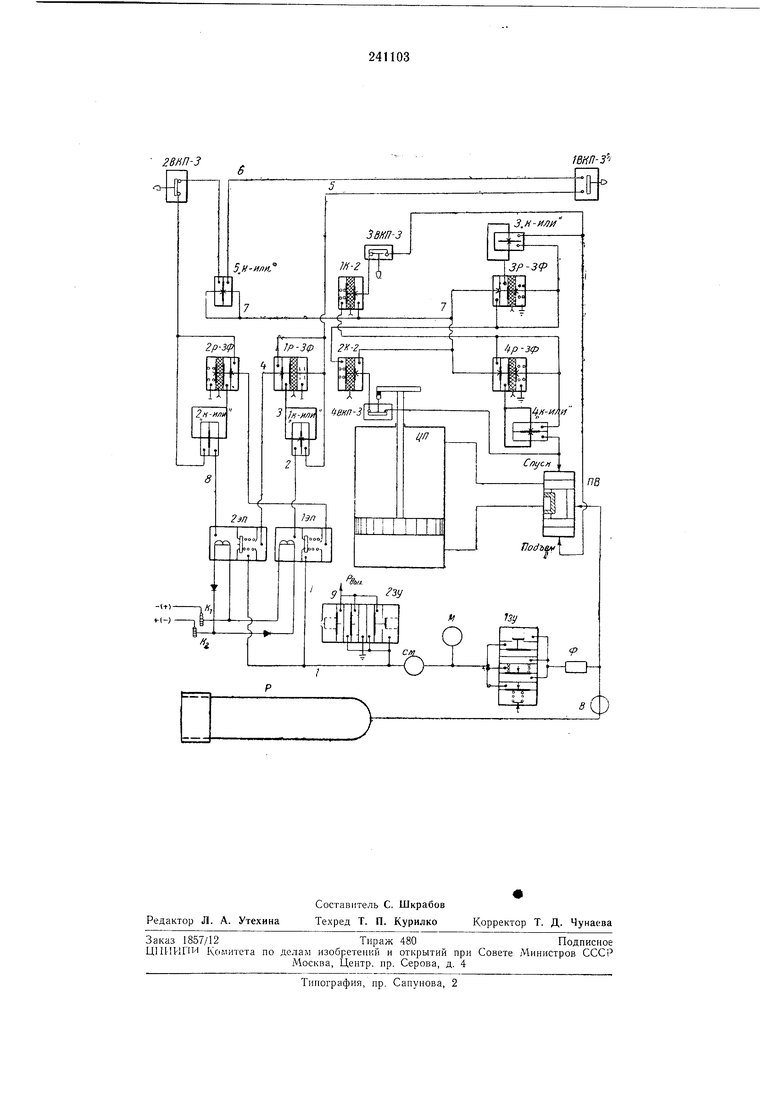
В предложенном устройстве а1втономный воздухосборник используется не только для работы пяевмоподъемника, но и для управления, запоминания команды и выполнения заданной программы, а выдача задания выкатчерез Дза скользящих 1контакта, что также упрощает Схему и иовышает ее наделшость. Автомобиль устанавли1вают в .приемном боксе. При этом двигатель его выключен, а руч1Чой тормоз расторможен. Тележка с помощью канатно-реечного выдвижного механизма выкатывается из кабины лифта в приемный ,бо:кс поя автомобиль. Включается ,пнев.мО(ПОДъемник тележ1ки, автомобиль шрилоднимается над полом бокса, и тележка с автомобилем .втягивается в кабину лифта. После подъема лифта иа нужный этаж автомобиль устанавливают в первый или второй ряд бокса. П.ри этом операция проводится в обратном порядке: груженая тележка двил ется, останавливается в первом или втором ряду бокса, пнвв.моподъемник опускается, порожняя тележка выкатывается из-1под автомобиля и вкатывается IB ка.бину ли|фта. Таким же образом автомобиль доставляется из бокса хра.нения в бокс выдачи или переставляется в свободный боюс из второго ряда лЮ|бого бокса, когда необходима последующая выдача автомобиля из второго ряда этого бокса. Управление выдвижным механизмом тележки осуществляется отдельной схемой управления (в описании не .рассмотрена). .На чертел е показана схема автоматического управления пневмоподъемниками тележки. Схема содержит «лапаны ./ «К-ИЛИ - 5 «К-ИЛИ, выполняющие логическую операцию универсальные трех:мембранные реле 1Р-ЗФ-4Р-ЗФ, клапаны одноконтактные 1К-2 и 2К-2, конечные выключатели 1 ВКП-3- 4ВКП-3, электропневматичеакие дискретные преобразователи 1ЭП и 2ЭП, задатчики давления 13У-23У, цилин.др пневмоподъемника ЦП, воздухора.опрвделитель ПВ, фильтр Ф, ра.апылитель смазки СМ, резервуар Р с сжатым воздухом, вентиль В, скользящие контакты Ki и Kz, манометр М и коммуникации /-8 между отдельными -элементами схемы. Схема работает следующим образом. Сигнал-задание поступает на схему автоматического управления пневмоцилиндрами выкатной тележаки через два скользящих контакта К и KZ, замкнутых только во (время стоя.нки тележки в кабине лифта. Поступление положительной полярности на контакт /Са означа.ет задание на работу пневмоподъемника в первом ближнем ряду бокса. При этом срабатывает электропневмопреобразователь 1ЭП. Его соленоид открывает нормально закрытое сопло и воздух давлением 1,4 кгс1см (в дальнейшем называется давлением сигнала или сипналом) поступает из пневмолинии питания / в .линию 2 и далее в (Клапан 1 «К-ИЛИ, с выхода iKOTOporo по линии 3 давление си1Г1нала .поступает на реле 1Р-ЗФ. Этот единичный сигнал, преодолевая упругость и давление подпора, равное 0,8 от давления сигнала и поданное в камеры элементов (на чертеже защтрихов ны) от отдельно.го задатчика авления 23У по линии 9, открывает нормальо закрытое сопло реле 1Р-ЗФ. Давление сигнала проходит теперь от пиающей пнев;молинии / через нормально отрытый пневмоконтакт электропнегвмопреобраователя в линию 4 и через 1Р-ЗФ по линии 5 а вход пневматического конечного выключателя .1ВКП-3 и на вход клапана 1 «К-ИЛИ. остунле1ние логической «единицы с выхода реле 1Р-ЗФ на второй вход клапана / К-ИЛИ обеапечивает самоблокировку реле 1Р-ЗФ, так как с выхода / «К-ИЛИ теперь поступает открывающий на реле 1Р-ЗФ и после снятия задающего сигнала с электропневмопреобразователя 1ЭП (при .размыкании контактов /Ci и 2). Это означает, что си.гнал-заданне зафиксирован в реле 1Р-ЗФ и клапане / «1{-ИЛИ, представляющих собой ячейку памяти. Тележка при поступлении команды из схемы управления ее выдвижным механизмо.м .выдвигается в нужный ряд. Контакты /Ci и К-2 размыкаются сразу же, как только тележка тронется с места. По достижении тележкой заданного ряда происходит нажатие на щток выключателя / ВКП-3. На выходе выключателя 1ВК.П-3 появляется ситнал «единица, который проходит по пнев:молинии 6 через клапан 5 «К-ИЛИ, по линии 7 и затем на входы клапанов 1К-2, 2К-2 и .реле ЗР-ЗФ и 4Р-ЗФ. Если предыдущая операция была по выдаче машины, то шток Цилиндра пневмоподъемника тележки утоплен, шток конечного выключателя 4ВКП-3 нажат, а его пневмоконтакт разомкнут. Следующая операция пневмоподъ емника может быть только обратной (подъем автомобиля на тележку). После выполнения этой жоманды тележка снова не может полу чить и выполнить никакой другой команды, кроме обратной по отнощению к последней выполненной команде, т. е. команды «Спуск автомобиля. Таким образом, при положении цилиндра, указанном на схеме, дол.жна быть выполнена команда «Подъем в заданном ряду бокса. Соответственно три наличии автомобиля на тележке шток цилиндра был бы .поднят и в заданном ряду требовалось опустить этот aiBто.мобиль на нол бокса. Таким образом, в этом положении сигнал не проходит дальще входа выключателя 4ВКП-3 и, следовательно, не поступает на вход «Спуск воздухораспределителя ПВ, а также па вход ячейки шамяти, состоящей из реле 4Р-ЗФ и клапана 4 «К-ИЛИ. Этот сигнал проходит через клапан 1К-2, залгкнутый .пневмоконтакт выключателя ЗВКП-3 на вход «Подъем воздухораспределителя (ПВ-63-2) и на ячейку памяти, состоя.щую из реле ЗРЗ-ЗФ и клапана 3 «К-ИЛИ. Сигнал, поступивщий на воздухораспределитель ПВ, перемещает его золотник, соединяя полость цилиндра, находящуюся над поршнем, с атмосферой, а нижнюю - с рабода ячейки тамяти, затирает клащан 2К-2, препятспвуя лостуллению сигнала на 4ВКП-3. Таким образом, и после начала подъема цилиндра пневмоподъемнИ|Ка и замьжания лиевMOiKOHTHiKTa ко«ечиого выключателя 4ВК.П-3 |СИГ1нал «Спуск не лоступит на воздухораспределитель ПВ.
Кла-пан 2К-2 запирает пневмолинию на 4ВК.П-3 и после лодъема цилиндра лневмоподъемника и размыкания вго штоком лнввмодатчика ЗВКП-3. Снятие Сигнала, поступающего с выхода ЗВКП-3 на клапан 3 «К-ИЛИ, ничего не изменяет, так как на второй ВХОД 3 «К-ИЛИ лостулает сигнал с выхода реле ЗРЗ-ЗФ.
В схему управления выдвижением тележКИ поступает с подпольных датчиков бокса информация о том, что автомобиль взят. Следует соответствующая 1команда. Тележка, нагруженная автомобилем, движется в кабину лифта. Пневмоко.нтакт 1ВКП-3 размыкается после начала движения тележки в кабину, сигнал «Подъем на выходе воздухораспределителя ПВ .исчезает, однако его золот1ник до поступления противоположного сигнала остается (В прежнем положении, и поэтому подпитка лневмоподъемпика сжатым воздухом продолжается. По приходе тележки в кабину замыкаются Контакты К и К2, и схема готова к получению следующей команды.
При подаче второй команды, т. е. при поступлении положительной полярности на контакт /Сь обтекается токОМ катушка соленоида электропневмопреобразователя 2ЭП. Стержень соленоида толкает заслонку вверх, открывается нижнее сопло электропневмопреобразователя 2ЭП, да1вление сигнала постуПает с линии питания 1 через пневмолинию 8 на вход контакта 2 «К-ИЛИ. Той же заслонкой перекрывается верхнее сопло элактропневмопреобразователя 2ЭП, давление сигнала в линию 4 и на вход реле перестает поступать. Давление исчезает также на выходе реле и на входе клапана / «К-ИЛИ, т. е. происходит «стирание ячейки памяти. Сигнал с ее выхода не поступает в линию 5, поэтому при движении тележки ми.мо первого ряда и нажатии воздействующего элгмента первого ряда на шток пневмодатчИка 1ВКП-3 ничего не изменяется, так как на входе этого датчика давление сигнала отсутствует.
При выдвижении тележки во второй ряд нажимается :шток пнввмодатчика 2ВКП-3, его пневмоконтакт замыкается и далее все происходит аналогично предыдущему случаю с той лишь разницей, что теперь на воздухораспределитель ПВ поступает через нормальнозамкнутые пневмаконтакты 4ВКП-3 команда «Спуск, а клапан 1К-2 закрыт сигналом, поступившим с выхода реле 4Р-ЗФ. Во избежание ложных срабатываний в схему управления двигателем механизма выдвижения тележки введен блок-контакт контроля целости цепи между контактами К и K-zПредмет и з о б р е т е н -и я
Устройство для автоматического управления пневмоподъемниками выкатных тележек
лифтов автомобильных гаражей, Содержащее клапаны «К-ИЛИ, одноконтактные .клапаны, трехмембраНные реле, электропневмопреобразователи, пневматические конечные выключатели, скользящие электрические контакты,
цилиндр пнев: оподъемника с воздухораСпределителем, резервуар сжатого воздуха с вентилем, фильтром и задатчиками, отличающееся тем, что, с целью упрощения устройства и повышения его надежности, в нем канал
питания воздухораспределителя соединен через вантиль с резервуаром сжатого воздуха, который через фильтр и задатчики соединен та1кже с каналами литания двух электропневмопреобразователей, электрические входы
которых соединены со скользящими электрическими контактами, нормально открытые пневматические контакты соединены с каналом питания трехмембранного реле в цепи другого преобразователя, а нормально закрытые пневматические ксата-кты связаны с однИ-м из входов двух элементов «К-ПЛИ, выход каждого из которых соединен со входом своего трехмембранного реле, а выходы реле соединены с другими входами указанных
элементов «К-ИЛИ и с двумя Пневматическими конечными выключателями, выходы которых через третий элемент «К-ИЛИ соединены с каналами питания двух других трехмембранных реле и со входами двух одноконтактных клапанов, выходы которых через другие пневматические конечные выключатели соединены с управляющими входами воздухораспределителя и через соответствующие четвертый и пятый элементы «К-ИЛИ связаны
со входами своих трехмембранных реле, выходы которых соединены с други и входами четвертого и пятого элементов «К-Р1ЛИ и с управляющими входами одноконтактных клапанов в цепи другого (конечного выключателя, а
выходы воздухораспределителя связаны со входами пнeiBMоцилиндра.
2ВНП-3
гвнп-з
| название | год | авторы | номер документа |
|---|---|---|---|
| Система дистанционного управления двигателем | 1974 |
|
SU631670A1 |
| ТИЧЕСКИЙ ГРУППОВОЙ ЗАДАТЧИК | 1969 |
|
SU240339A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ НАПОРНЫМ МЕХАНИЗМОМ ЭКСКАВАТОРА | 1972 |
|
SU427131A1 |
| УНИВЕРСАЛЬНАЯ СИСТЕМА ДОЗИРОВАНИЯ ЖИДКОСТЕЙ НА БАЗЕ МЕМБРАННОГО НАСОСА | 2016 |
|
RU2628984C1 |
| Пневматическое управляющее устройство | 1985 |
|
SU1327056A1 |
| УСТРОЙСТВО ДЛЯ НАГНЕТАНИЯ КРОВИ | 1970 |
|
SU419222A1 |
| Пневматическое устройство для централизованного контроля и управления | 1974 |
|
SU594485A1 |
| Устройство для смазки гребней колесных пар локомотива | 1977 |
|
SU722790A1 |
| Пневматический преобразователь аналог-код | 1973 |
|
SU752303A1 |
| Система снабжения транспортного средства сжатым воздухом | 1988 |
|
SU1588602A1 |