ш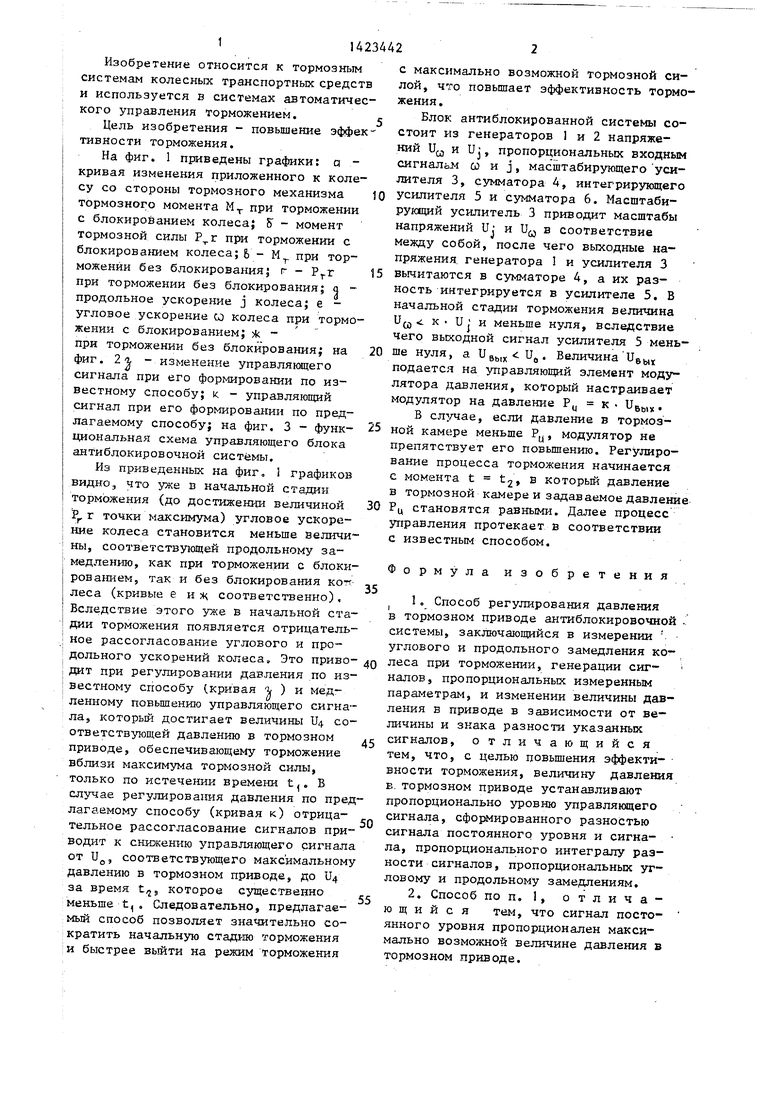
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регулирования качения колес при торможении автомобиля | 1977 |
|
SU768676A1 |
| Способ автоматического управления торможением | 1981 |
|
SU1013323A1 |
| Устройство для регулирования режима торможения транспортного средства | 1978 |
|
SU746410A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ ТРАНСПОРТНОЙ МАШИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2086441C1 |
| Система торможения транспортного средства | 1986 |
|
SU1526570A3 |
| Способ предотвращения скольжения колеса | 1987 |
|
SU1555159A1 |
| Способ управления торможением транспортного средства и устройство для его осуществления | 2022 |
|
RU2819157C1 |
| Противоблокировочное устройство тормозной системы транспортного средства | 1978 |
|
SU1553428A1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ БЛОКИРОВАНИЯ КОЛЕС ТРАНСПОРТНОГО СРЕДСТВА ПОВЫШЕННОЙ ПРОХОДИМОСТИ ПРИ ТОРМОЖЕНИИ | 2000 |
|
RU2211770C2 |
| Противоблокировочное устройство для тормозной системы транспортного средства | 1973 |
|
SU622392A3 |
Изобретение относится к тормозным системам колесных транспортных средств. Цель изобретения - повьшение эффективности торможения. Генераторами 1 и 2 формируются напряжения U и U:, пропорциональные продольному и угловому ускорениям колеса. Сумматор 4 формирует сигнал разности напряжения Ujj и напряжения к - U ; от масштабирующего .усилителя 3. Напряжение на выходе интегрирующего усилителя 5, подключенного к выходу сумматора 4, вычитается в сумматоре 6 от напряжения UQ постоянного уровня. Давление в тормозном приводе устанавливается пропорционально напряжению .выходе сумматора 6. 1 з.п. ф-лы, 3 ил.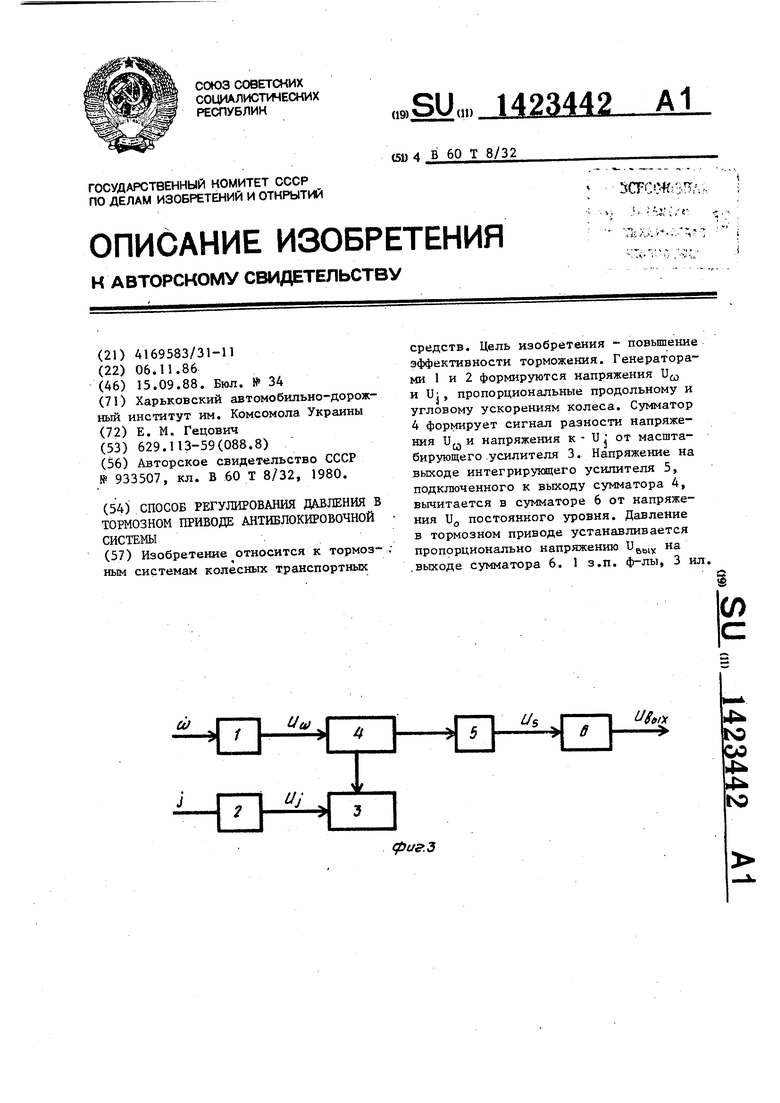
и;
3
сриг.З
Изобретение относится к тормозным системам колесных транспортных средств и используется в системах автоматического управления торможением. г
Цель изобретения - повышение эффек тивкости торможения.
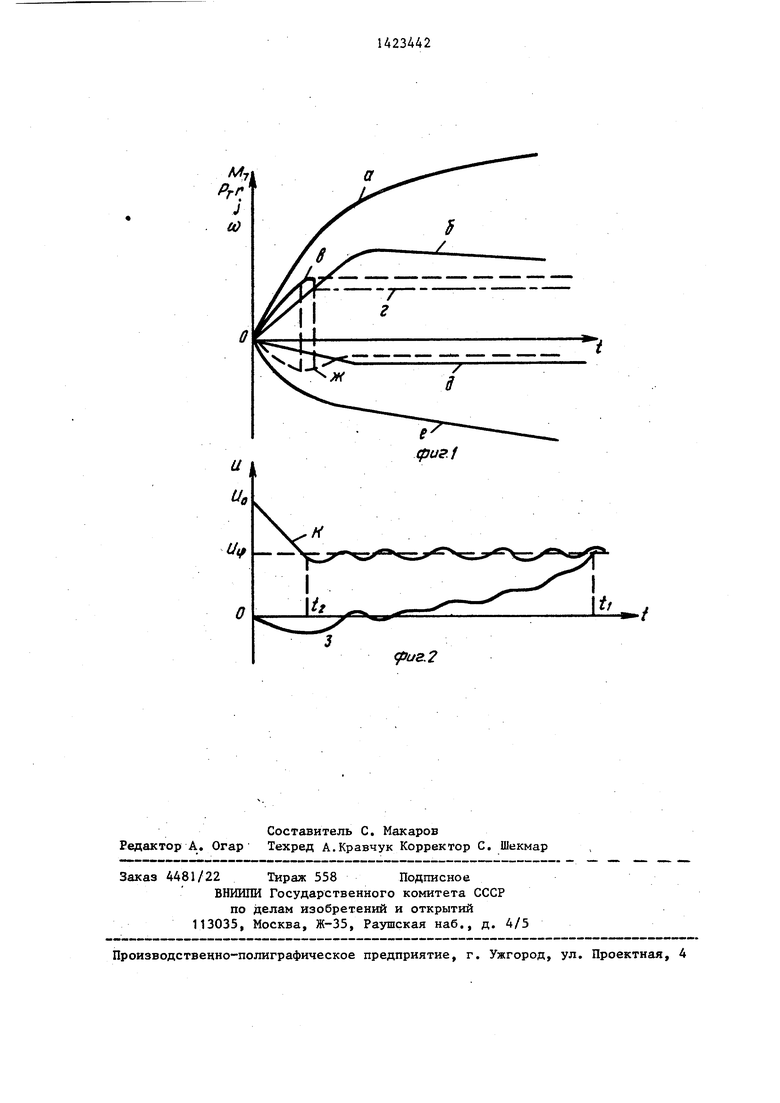
На фиг. 1 приведены графики: а - кривая изменения приложенного к колесу со стороны тормозного механизма тормозного момента М при торможении с блокированием колеса; 5 - момент тормозной силы при торможении с блокированием колеса;Б - м при торможении без блокирования; г - при торможении без блокирования; а - продольное ускорение j колеса; е - угловое ускорение со колеса при торможении с блокированием; k - при торможении без блокирования; на фиг. 2 г - изменение управляющего сигнала при его формировании по известному способу; к - управляющий сигнал при его формировании по предлагаемому способу; на фиг. 3 - функциональная схема управляющего блока антиблокировочной системы.
Из приведенных на фиг, 1 графиков видно, что уже в начальной стадии торможения (до достижении величиной 1 г точки мгиссимума) угловое ускоре- ние колеса становится меньше величи ны, соответствующей продольному за- медлению, как при торможении с блокированием, так и без блокирования коп- леса (кривые е и соответственно), Вследствие этого уже в начальной стадии торможения появляется отрицательное рассогласование углового и про10
5
20
45
: дольного ускорений колеса. Это приво- о леса при торможении, генерации сигI дит при регулировании давления .по изI вестному способу (кривая ) и медленному повышению управляющего сигнала, которьй достигает вел.ичины U4 соответствующей давлению в тормозном приводе, обеспечивающему торможение вблизи максимума тормозной силы,
только по истечении времени t,. В случае регулирования давления по предлагаемому способу (кривая к) отрицательное рассогласование сигналов приводит к снижению управляющего сигнала от Ug, соответствующего максимальному давлению в тормозном приводе, до U4 за время t, которое существенно
50
меньше t,. Следовательно, предлагаемый способ позволяет значительно сократить начальную стад1-1Ю торможения и быстрее выйти на режим торможения
налов, пропорциональных измеренным параметрам, и изменении величины дав ления в приводе в зависимости от величины и знака разности указанных сигналов, отличающийся тем, что, с целью повьш1ения эффективности торможения, величину давлени Е. тормозном приводе устанавливают пропорционально уровню управляющего сигнала, сформированного разностью сигнала постоянного уровня и сигнала, пропорционального интегралу разности сигналов, пропорциональных угловому и продольному замедлениям,
с максимально возможной тормозной силой, что повьшает эффективность торможения .
Блок антиблокированной системы состоит из генераторов 1 и 2 напряжений Иц и U;, пропорциональных входным сигналь со и j, масштабирующего усилителя 3, сумматора 4, интегрирующего усилителя 5 и сумматора 6. Масштабирующий усилитель 3 приводит масштабы напряжений U; и и, в соответствие между собой, после чего выходные напряжения, генератора 1 и усилителя 3 вычитаются в сумматоре 4, а их разность интегрируется в усилителе 5. В начальной стадии торможения величина Uy, к- U; и меньше нуля, вследствие чего вькодной сигнал усилителя 5 меньше нуля, а UBJ,. Величина Ugbtx подается на управляющий элемент модулятора давления, который настраивает модулятор на давление Рц к В случае, если давление в тормозной камере меньше Р, модулятор не препятствует его повьш1ению. Регулирование процесса торможения начинается с момента t tj, в который давление в тормозной камере и задаваемое давление
Рц становятся равными. Далее процесс управления протекает в соответствии с известным способом.
Формула изобретения
5
0
налов, пропорциональных измеренным параметрам, и изменении величины давления в приводе в зависимости от величины и знака разности указанных сигналов, отличающийся тем, что, с целью повьш1ения эффективности торможения, величину давления Е. тормозном приводе устанавливают пропорционально уровню управляющего сигнала, сформированного разностью сигнала постоянного уровня и сигнала, пропорционального интегралу разности сигналов, пропорциональных угловому и продольному замедлениям,
Uif s-.-....«
Hi.
риг.2
| Способ регулирования тормозного момента на колесе транспортного средства | 1980 |
|
SU933507A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
