Мт
1,0 S
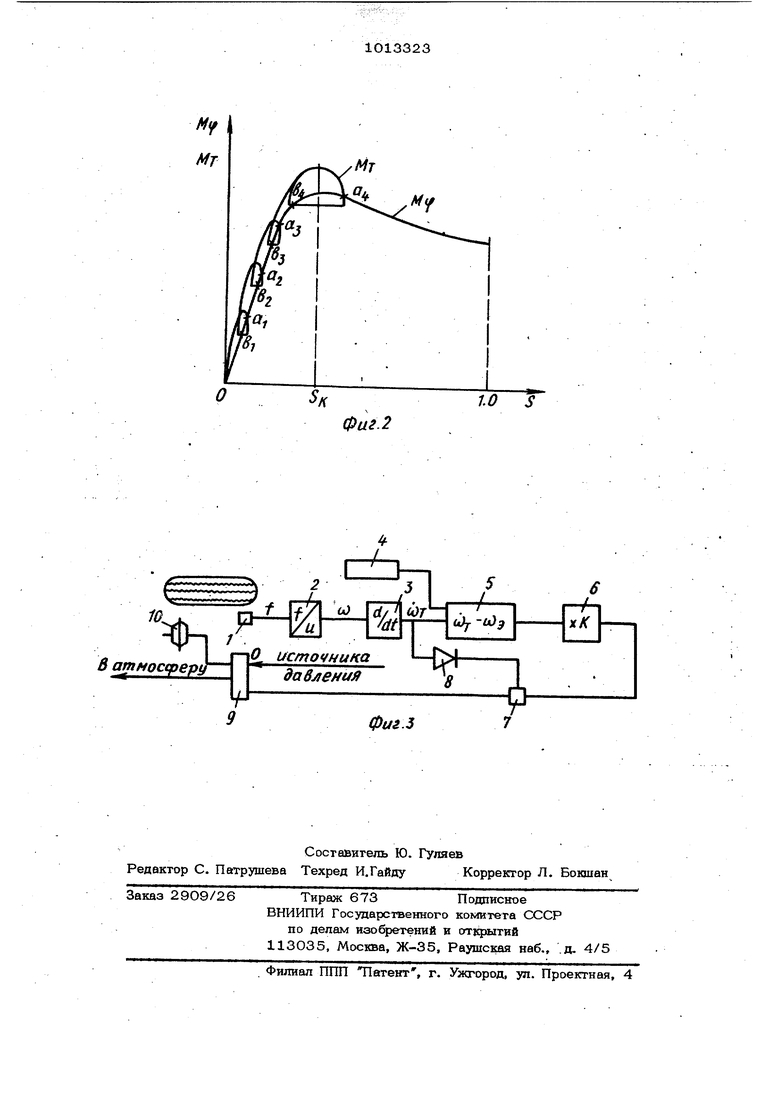
фиг.1 Изобретение относится к тормозным системам транспортных средств и может быть использовано .в автоматических противоблокировочных системах. Известен способ автоматического управления торможением, заключающийся в корректировке темпа изменения давления в тормозном приводе пропорционально разности текущего и эталонного значерий углового ускорения колеса flj Недостаток известного способа заключается в том, что, в случае использо вания в качестве контролируемого парам ра углового замедления колеса, колесо блокируется после 4-8 циклов перешл чения давления (1 - 1,5 с) и остается забпокировашплм до конца тормоЖения, Кривая, изменения тормозного момента при блокировании колеса показана криво М-р на фиг. 1. Цель изофетения заключается в повы шении эффективности торможения путем предотвращения блокирования колеса. Указанная цель достигается тем, что согласно способу автоматического управ ления торможением, заипочакшемуся в корректировке темпа изменения давления в тормозном приводе пропорционально разности текущего и эталонного значений углового ускорения колёса, при изменении знака углового ускорения с отрицательного на положительный коррек тировку давления в тормозном приводе прекращают, а при обратном изменении знака УГЛОВОГО ускорения корректировку даззления возобновляют. На фиг. 1 показан фазовый портрет процесса регулирова ния торможения по Известному способу; на фиг. 2 - то же по предлагаемому спосрбу; на фиг. 3 функциональная схема устройства, реали зующего предлагаемый способ. При управлении торможением кривая тормозного момента М периодически пересекает кривую момента тормозной силы Mif.i3To приводит к периодическому изменению знака углового ускорения колеса. В точках а - о(. знак углового ускорения изменяется с отрицательного на положительный и корректировку давле ния в тормозном приводе прекращают. Вследствие этого с некоторым запаздыв нием, обусловленным динамическими свойствами элементов тормозной системы и регулирукяцего устройства, прекращается изменение тормозного- момента М. Далее кривая М снова пересекает Mj. (точки Ь-- i) ), знак углового ускорения изменяется на отрицательный и корректировку давления возобновляют. Сравнение фазовых портретов фиг. 1 и фиг. 2 показывает, что введение операшга отсечки давления несущественно влияет на характер пратекания процесса регутгарования в устойчивой зоне скольжения (О 5 5j). В случае перехода в неустойчивую зону () атсечка в точке (обеспечивает гарантированный выход колеса из неустойчивой зоны в устойчивую, что предотвращает возможность блокирования колеса. Устройство для реализации предлагаемого способа состоит из импульсного колесного датчика 1, преобразователя частота-напряжение 2, дифференцирующего устройства 3, блока 4 задачи эталонного углового замедления, блока 5 вычисления разности, усилителя 6, прерывателя 7, диода 8 и модулятора давления 9, пневматически связанного с тормозной камерой Ю. Импульсный сигнал датчика 1 преобразуется преобразователем 2 в аналог угловой скорости, котооый дифференцируется в устройстве 3. Блок 5вычисляет разность аналога углового ускорения коле са и его эталонного значения, задаваемого блоком 4. Эта разность после усиления в усилителе 6 подается через нормально замкнутый прерыватель 7 как управляющий сигнал на модуляторе 9, который корректирует давление в камере 10 с темпом, пропорциональным указанной раэности. При смене знака углового ускорения с отрицательного на положительный сигнал из устройства 3 через диод 8 поступает к прерьтателю 7 и размьпсает цепь управления модулятором 9. При обратной смене знака углового ускорения управляющий сигнал на прерьтателе 7 исчезает и он снова замыкает цепь управления модулятором 9. Описываемый способ обеспечивает гарантированный выход колеса из неустойчивой зоны, что предотвращает его блокирование.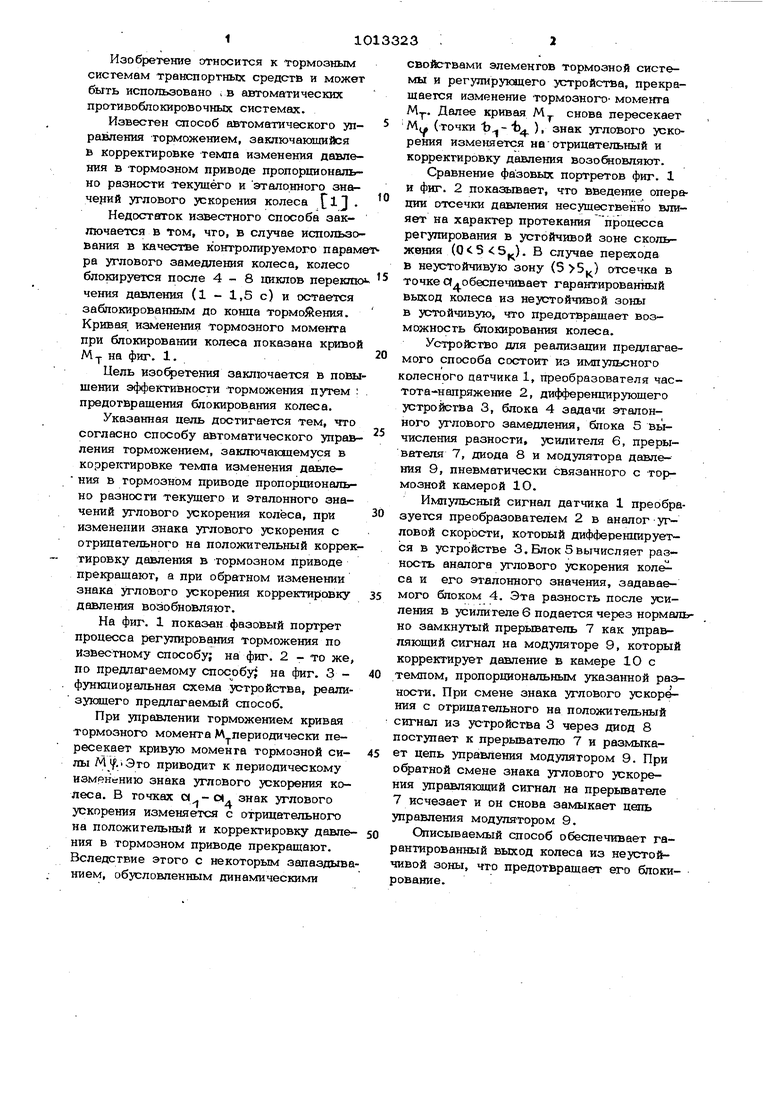
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ торможения колеса транспортного средства | 1980 |
|
SU927601A1 |
| Способ автоматического управления торможением | 1981 |
|
SU1022841A1 |
| Способ автоматического управления торможением | 1985 |
|
SU1368209A1 |
| Способ предотвращения скольжения колеса | 1987 |
|
SU1555159A1 |
| Способ регулирования давления в тормозном приводе антиблокировочной системы | 1986 |
|
SU1423442A1 |
| Способ управления процессом тормо-жЕНия КОлЕСА ТРАНСпОРТНОгО СРЕдСТВА | 1979 |
|
SU852679A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ ТРАНСПОРТНОЙ МАШИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2086441C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ БЛОКИРОВАНИЯ КОЛЕС ТРАНСПОРТНОГО СРЕДСТВА ПОВЫШЕННОЙ ПРОХОДИМОСТИ ПРИ ТОРМОЖЕНИИ | 2000 |
|
RU2211770C2 |
| Способ регулирования качения колес при торможении автомобиля | 1977 |
|
SU768676A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ РЕЖИМОВ ДВИЖЕНИЯ МОБИЛЬНЫХ МАШИН | 1997 |
|
RU2125517C1 |
СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ , эакпючакжшйся в корректировке темпа изменения давления в тормозномприводе пропорционально разности текущего и эталонного значений углового .ускорения колеса, отличаюши йся тем, что, с целью повышения эффективности торможения путем предотвращения блокирования колеса, при изменении знака углового }п:кореш1я с отрицательного на положительный корректировку давления в тормозном, приводе прекращают, а при обратномизменении знака углового ускорения корректировку давления возобновляют.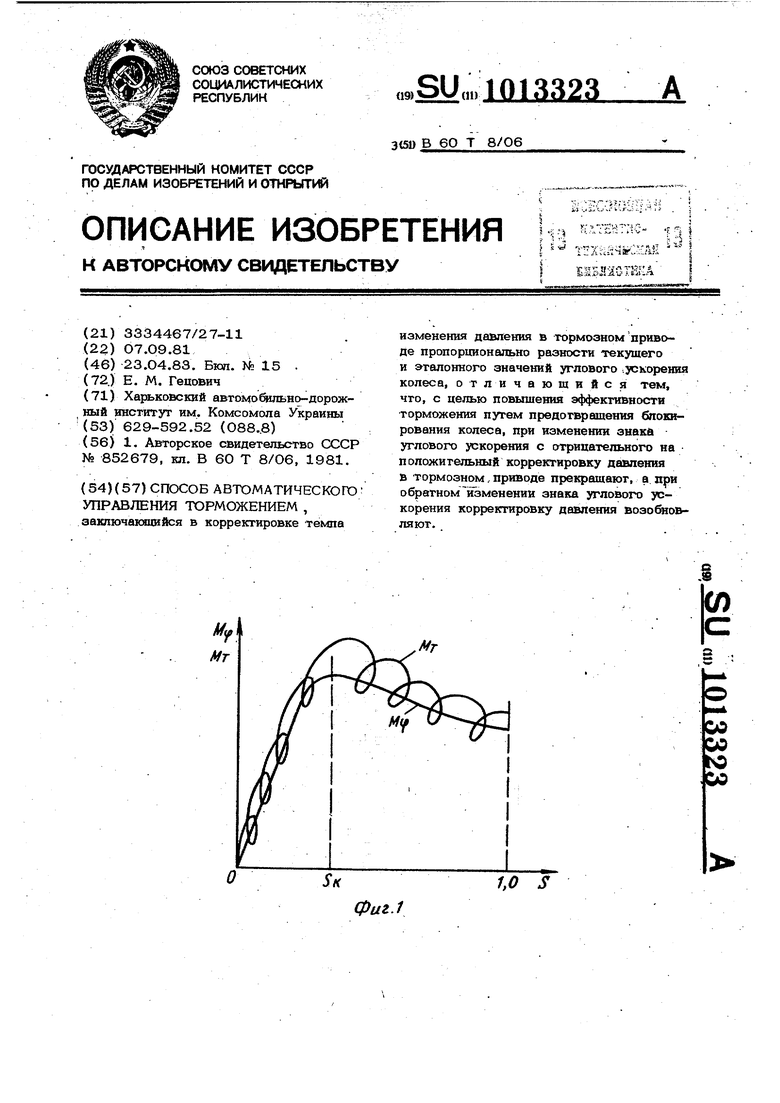
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ управления процессом тормо-жЕНия КОлЕСА ТРАНСпОРТНОгО СРЕдСТВА | 1979 |
|
SU852679A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
