Изобретение относится к автомобилестроению и может быть использовано в тормозных системах, а именно в автоматических противоблокйровочных системах. Известны способы регулирования каче- 5 НИН колес при торможении, осуществляющие регулирование качения путем периодического затормаживания и растормаживания колес 1, 2. Недостатки способов заключаются в том, ю что скорость растормаживания колес постоянна. Это приводит к тому, что по мере снижения скорости автомобиля в процессе торможения колеса в каждом последующем цикле достигают больших значений про- js скальзывания и в конце торможения могут достигать полного блокирования. Наиболее близким техническим решением к изобретению является способ регулирования качения колес при торможении ав- 20 томобиля, заключающийся в измерении угловой скорости каждого колеса, определении углового замедления колеса для сравнения с пороговым значением, растормаживаиии колеса, путем снижения давления в 25 тормозном приводе при достижении угловым замедлением порогового значения, последующем повторном затормаживании и измерении в процессе торможения скорости автомобиля 3.30 Недостаток этого способа заключается в следующем. Нри уменьщении скорости движеиия автомобиля скорость блокирования, определяемая темпом нарастания проскальзывания колеса в контакте с дорогой возрастает. Величина - связана с параметрами, характеризующими динамику движения колеса, соотнощением /г яДоялj -.- :Mr-G-r- fj,, где / - момент инерции колеса; Уа - скорость движения автомобиля; г - радиус колеса; MI - подведенный к колесу тормозной момент; G - вертикальная нагрузка на колесо;fx - коэффициент сцепления колеса с дорогой в продольном направлении. Из этого соотнощения следует, что при прочих равных условиях меньшим значениям Уа соответствуют большие значения Вследствие этого время блокирования dt
колеса при уменьшении скорости движения уменьшается. Это при постоянной скорости снижения давления приводит к тому, что в каждом последуюш,ем цикле затормаживания и растормаживания колесо достигает больших величин проскальзывания, чем в иредыдушем, и в конце торможения может достигать полного блокирования.
Это подтверждается результатами испытаний, которые представлены в таблице. Данные получены при постоянных пороговом значении углового замедления и скорости снижения давления в тормозном приводе.
Повышение величины проскальзывания приводит к снижению коэффициента сцеп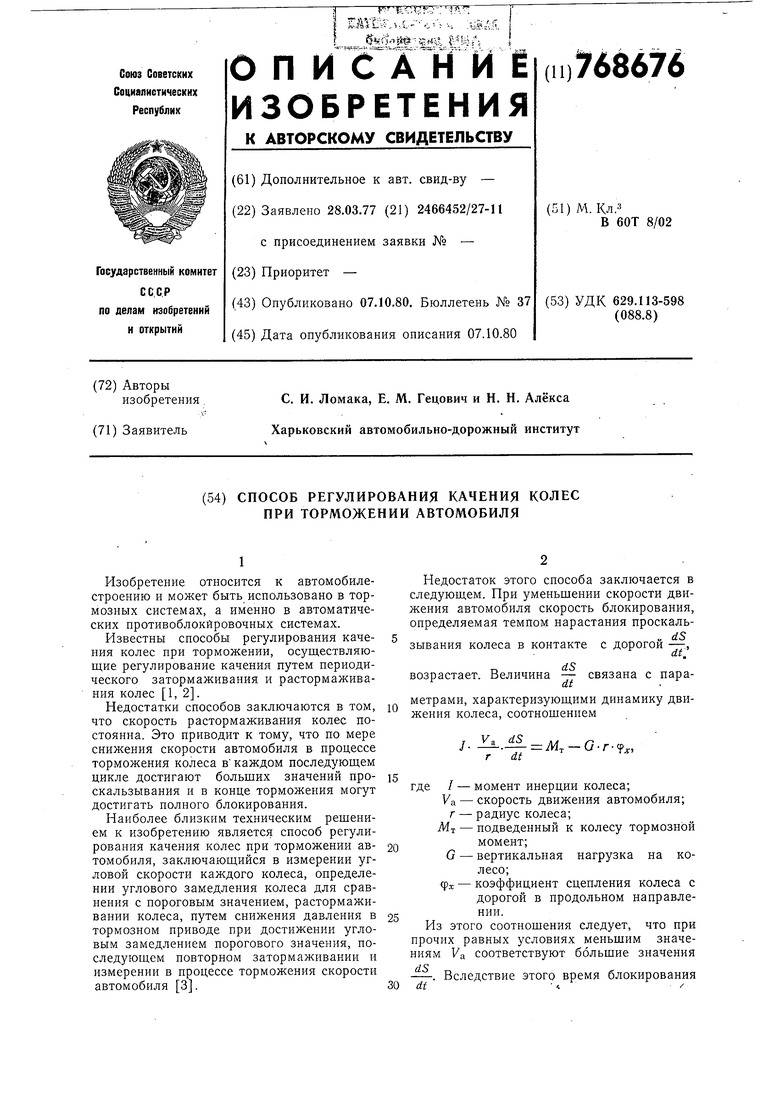
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ предотвращения блокированияКОлЕСА АВТОМОбиля | 1979 |
|
SU839789A1 |
| Способ управления процессом торможения колеса автомобиля | 1977 |
|
SU779120A1 |
| Способ предупреждения блокирования колеса автомобиля | 1977 |
|
SU783081A1 |
| Способ управления процессом торможения автомобиля | 1980 |
|
SU912570A1 |
| Пневматическая противоблокировочная тормозная система | 1977 |
|
SU740567A1 |
| Способ предотвращения скольжения колеса | 1987 |
|
SU1555159A1 |
| Способ регулирования качения колеса в тормозном режиме | 1980 |
|
SU878627A1 |
| Пневматическая противоблокировочная тормозная система | 1977 |
|
SU742201A1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ БЛОКИРОВАНИЯ КОЛЕС ТРАНСПОРТНОГО СРЕДСТВА ПОВЫШЕННОЙ ПРОХОДИМОСТИ ПРИ ТОРМОЖЕНИИ | 2000 |
|
RU2211770C2 |
| Противоблокировочная тормозная сис-TEMA | 1977 |
|
SU844421A1 |
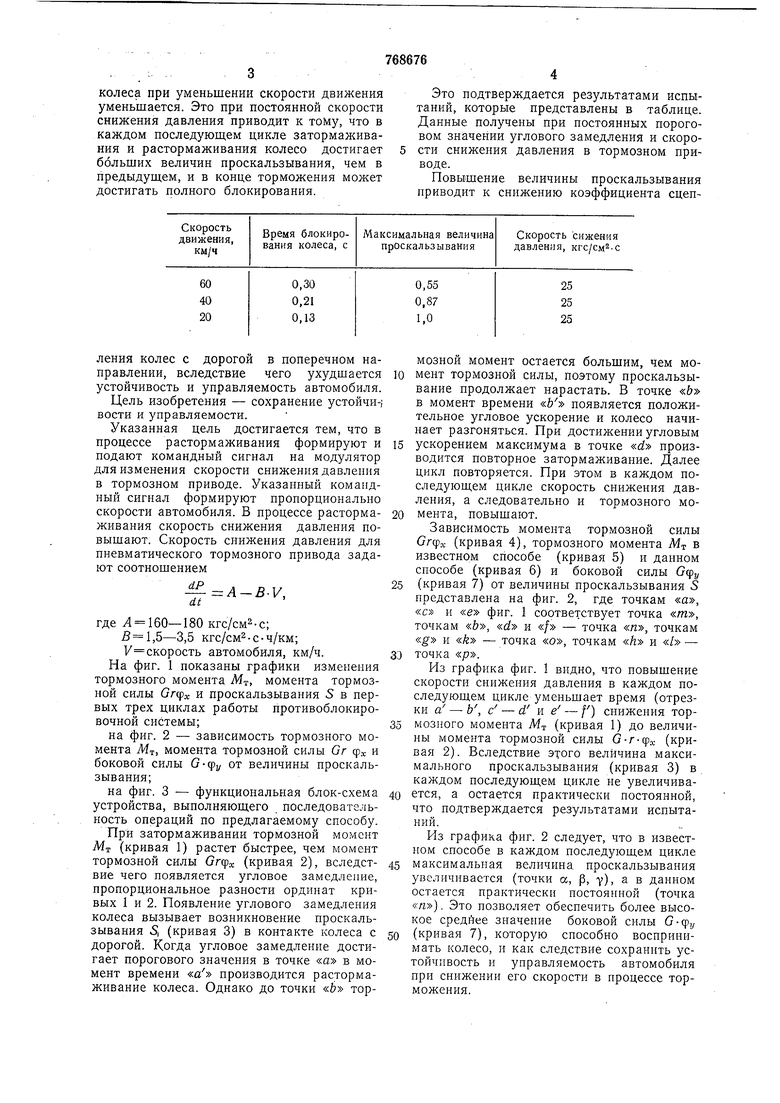
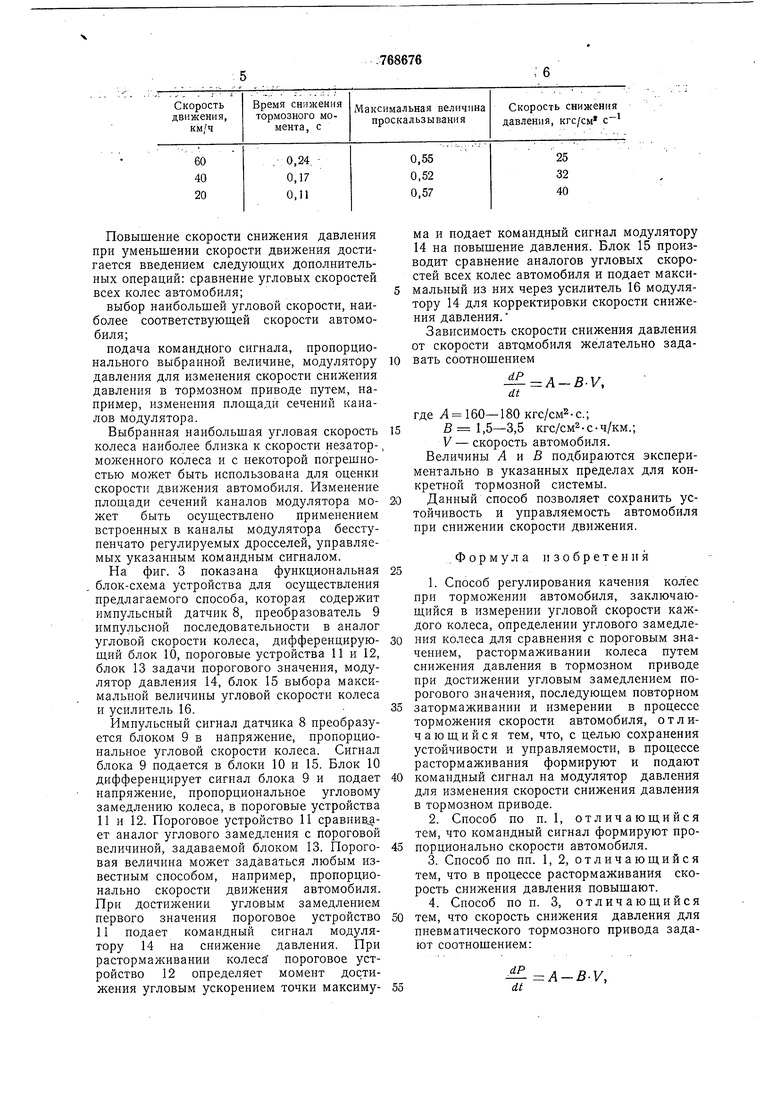
ления колес с дорогой в поперечном направлении, вследствие чего ухудшается устойчивость и управляемость автомобиля. Цель изобретения - сохранение устойчи-; вости и управляемости. Указанная цель достигается тем, что в процессе растормаживания формируют и подают командный сигнал на модулятор для изменения скорости снижения давления в тормозном приводе. Указанный командный сигнал формируют пропорционально скорости автомобиля. В процессе растормаживания скорость снижения давления повышают. Скорость снижения давления для пневматического тормозного привода задают соотношением A-B-V, где Л 160-180 кгс/см -с; 5 1,5--3,5 кгс/см -с-ч/км; У скорость автомобиля, км/ч. На фиг. 1 показаны графики изменения тормозного момента Мт, момента тормозной силы Gr(fx и проскальзывания S в первых трех циклах работы противоблокировочной системы; на фиг. 2 - зависимость тормозного момента Mf, момента тормозной силы Gr ф и боковой силы G-ffy от величины проскальзывания;на фиг. 3 - функциональная блок-схема устройства, выполняюшего последовательность операций по предлагаемому способу. При затормаживании тормозной момент Мт: (кривая 1) растет быстрее, чем момент тормозной силы Огфж (кривая 2), вследствне чего появляется угловое замедление, пропорциональное разности ординат кривых 1 и 2. Появление углового замедления колеса вызывает возникновение проскальзывания 5| (кривая 3) в контакте колеса с дорогой. Когда угловое замедление достигает порогового значения в точке «я в момент времени «а производится растормаживание колеса. Однако до точки «Ь тормозной момент остается большим, чем момент тормозной силы, поэтому проскальзывание продолжает нарастать. В точке «Ь в момент времени «Ь появляется положительное угловое ускорение и колесо начинает разгоняться. При достижении угловым ускорением максимума в точке «d производится повторное затормаживание. Далее цикл повторяется. При этом в каждом последуюш;ем цикле скорость снижения давления, а следовательно и тормозного момента, повышают. Зависимость момента тормозной силы Сгфж (кривая 4), тормозного момента Мт в известном способе (кривая 5) и данном способе (кривая 6) и боковой силы 5фу (кривая 7) от величины проскальзывания S представлена на фиг. 2, где точкам «а, «с и «е фиг. 1 соответствует точка «/и, точкам «и, «d и «/ - точка «л, точкам « и «k - точка «о, точкам «/г и «/ - точка «р. Из графика фиг. 1 видно, что повышение скорости снижения давления в каждом носледуюшем цикле уменьшает время (отрезки а - Ь, с - d и е - /) снижения тормозного момента MT: (кривая 1) до величины момента тормозной силы G-r-f x (кривая 2). Вследствие этого величина максимального проскальзывания (кривая 3) в каждом последующем цикле не увеличивается, а остается практически постоянной, что подтверждается результатами испытаний. Из графика фиг. 2 следует, что в известном способе в каждом последующем цикле максимальная величина проскальзывания увеличивается (точки а, р, Y) в данном остается практически постоянной (точка «л). Это позволяет обеспечить более высокое средйее значение боковой силы О-фу (кривая 7), которую способно воспринимать колесо, и как следствие сохранить устойчивость и управляемость автомобиля при снижении его скорости в процессе торможения. Повышение скорости снижения давления при уменьшении скорости движения достигается введением следуюш,их доиолнительных онераций: сравнение угловых скоростей всех колес автомобиля; выбор наибольшей угловой скорости, наиболее соответствующей скорости автомобиля;подача командного сигнала, пропорционального выбранной величине, модулятору давления для изменения скорости снижения давления в тормозном приводе путем, например, изменения плош,ади сечений каналов модулятора. Выбранная наибольшая угловая скорость колеса наиболее близка к скорости незаторможенного колеса и с некоторой погрешностью может быть использована для оценки скорости движения автомобиля. Изменение нлощади сечений каналов модулятора может быть осуществлено применением встроенных в каналы модулятора бесступенчато регулируемых дросселей, управляемых указанным командным сигналом. На фиг. 3 показана функциональная . блок-схема устройства для осуществления нредлагаемого снособа, которая содержит импульсный датчик 8, преобразователь 9 импульсной последовательности в аналог угловой скорости колеса, дифференцирующий блок 10, пороговые устройства 11 и 12, блок 13 задачи норогового значения, модулятор давления 14, блок 15 выбора максимальной величины угловой скорости колеса и усилитель 16. Импульсный сигнал датчика 8 преобразуется блоком 9 в напряжение, пропорциональное угловой скорости колеса. Сигнал блока 9 подается в блоки 10 и 15. Блок 10 дифференцирует сигнал блока 9 и подает нанряжение, нронорциональное угловому замедлению колеса, в пороговые устройства 11 и 12. Пороговое устройство И сравнивает аналог углового замедления с пороговой величиной, задаваемой блоком 13. Пороговая величина может задаваться любым известным способом, например, пропорционально скорости движения автомобиля. При Достижении угловым замедлением первого значения пороговое устройство 11 подает командный сигнал модулятору 14 на снижение давления. При растормаживании колеса нороговое устройство 12 определяет момент достижения угловым ускорением точки максимума и подает командный сигнал модулятору 14 на повышение давления. Блок 15 производит сравнение аналогов угловых скоростей всех колес автомобиля и подает максимальный из них через усилитель 16 модулятору 14 для корректировки скорости снижения давления. Зависимость скорости снижения давления от скорости авто.мобиля желательно задавать соотношением A-B-V, где Л 160-180 кгс/см -с.; ,5-3,5 кгс/см -с-ч/км.; V - скорость автомобиля. Величины Л и В подбираются экспериментально в указанных пределах для конкретной тормозной системы. Данный способ позволяет сохранить устойчивость и управляемость автомобиля при снижении скорости движения. .Формула изобретения 1.Способ регулирования качения колес при торможении автомобиля, заключающийся в измерении угловой скорости каждого колеса, определении углового замедления колеса для сравнения с пороговым значением, растормаживании колеса путем снижения давления в тормозном приводе при достижении угловым замедлением порогового значения, носледующем повторном затормаживании и измерении в процессе торможения скорости автомобиля, отличающийся тем, что, с целью сохранения устойчивости и управляемости, в процессе растормаживания формируют и подают командный сигнал на модулятор давления для изменения скорости снижения давления в тормозном приводе. 2.Способ по п. 1, отличающийся тем, что командный сигнал формируют пропорционально скорости автомобиля. 3.Снособ по пп. 1, 2, отличающийся тем, что в процессе растормаживания скорость снижения давления повышают. 4.Способ по п. 3, отличающийся тем, что скорость снижения давления для пневматического тормозного привода задают соотношением: A-B-V, где Л 160-18 кГс/см2.с; ,5-3,5 кгс/см -с-ч/км; V - скорость автомобиля, км/ч. Источники информации. принятые во внимание при экспертизе /.;, 1.Патент США № 3563350, кл. 188/181, 1971. 2.Патент США № 3663069, кл. 303/21, 1972. 3. Патент США № 3747989, кл. 303/21, 1973 (прототип). е
