U23487
цепи с односторонним изгибом, связанной с тяговым органом 6, также выполненным в виде замкнутой цепи, охватывающей приводную звездочку 7 и ролик 8. Каретка 2 в поднятом положении фиксируется одной собачкой, а кон соль 3 в выдвинутом положении - другой собачкой. р5е собачки выключаются стержнями, смонтированными на подвесках. Опуская один стержень, выключают одггу собачку, а поднимая другой стержень, выключают другую собачку. Привод тягового органа 6 выполнен самотормозящимся . 3 з.п. ф-лы, 3 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Строительный подъемник | 1982 |
|
SU1104088A1 |
| Подъемник | 1972 |
|
SU537023A1 |
| КАНАТНЫЙ КОНВЕЙЕР СПАСЕНИЯ ЛЮДЕЙ ПРИ ПОЖАРЕ | 2010 |
|
RU2435620C1 |
| Строительный подъемник | 1988 |
|
SU1546403A1 |
| СТРОИТЕЛЬНЫЙ ПОДЪЕМНИК | 1971 |
|
SU417362A1 |
| Строительный подъемник | 1984 |
|
SU1276609A1 |
| Строительный подъемник | 1988 |
|
SU1588677A1 |
| Механизм стопорения грузовой каретки строительного подъемника | 1987 |
|
SU1474063A1 |
| Маятниковая подвесная канатная дорога | 1961 |
|
SU142339A1 |
| Установка для подачи стержней | 1980 |
|
SU950480A1 |
Изобретение относится к грузоподъемным устройствам для подачи грузов в проемы зданий и может быть использовано на строящихся объектах или в высотных складских сооружениях. Цель изобретения - повышение эксплуатационных свойств путем механизации фиксации консоли и прямолинейного перемещения груза при вводе его в здание. Строительный подъемник состоит из мачты 1, каретки 2, перемещающейся по направляющим и несущей на себе консоль 3. Последняя выполнена в виде е 4 К 00 4 00 
1
Изобрете1ше относится к грузоподъемным устройствам для подачи грузов в проемы зданий и может быть использовано на строящггхся объектах или высо мых складских сооружениях.
Цель изобретения - повышение эксплуатационных свойств подъемника путем механизации фиксации консоли и прямолипейиого перемещения груза при вводе его в здание.
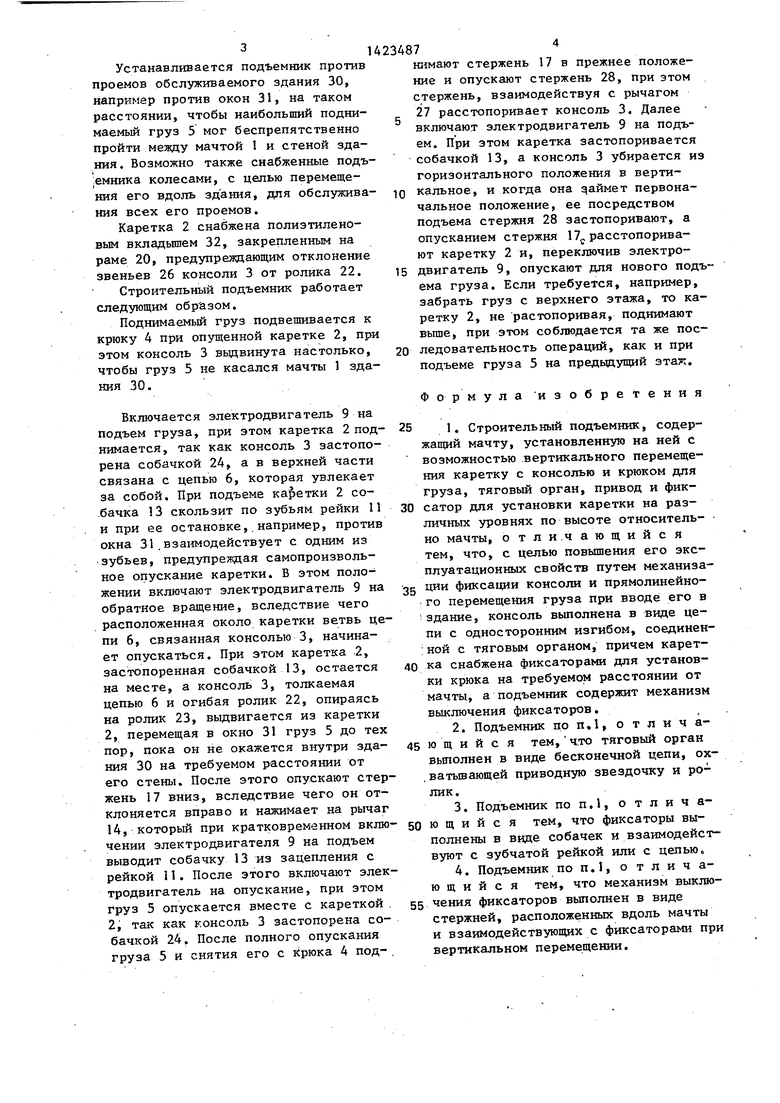
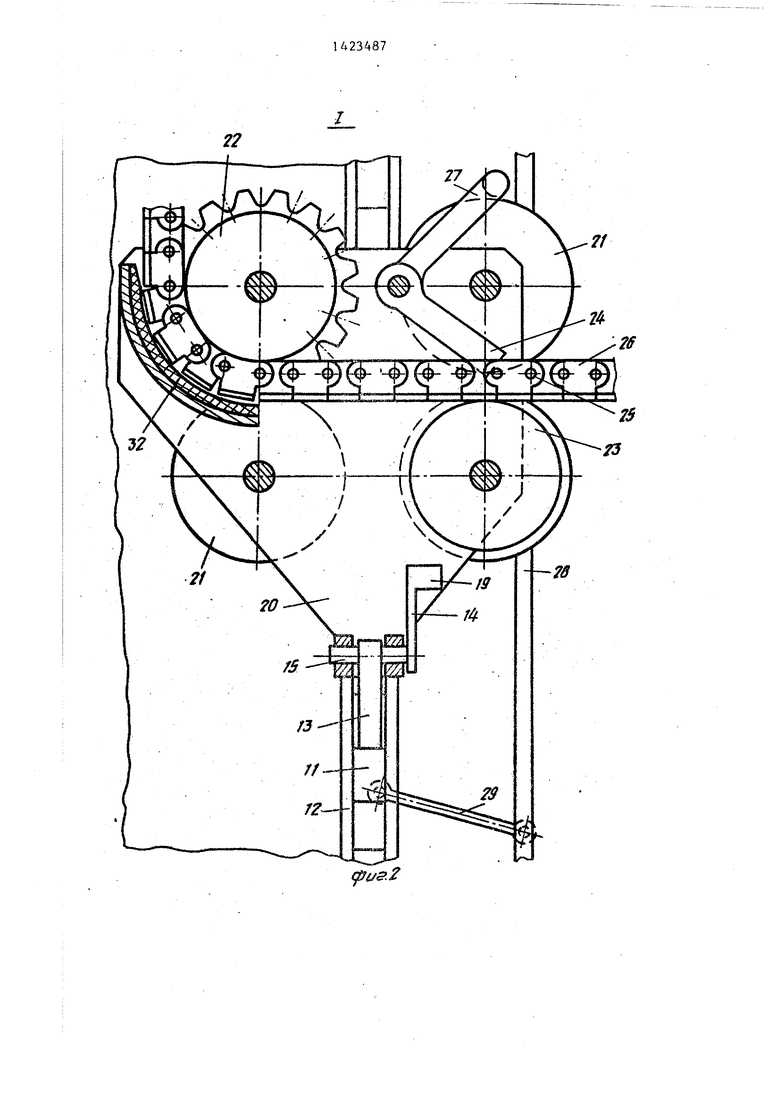
На фиг.1 представлен подъемник, общий вид; на фиг.2 - узел .1 на фиг.1 на фиг. 3 - вид А на фиг. .
Строительный подъемник состоит из мачты 1 и установленной на ней с возможностью вертикального перемещения каретки 2 с консолью 3, оснащенной крюком А для груза 5. Консоль 3 выполнена в виде цепи с односторонним изги бом, связанной с тяговым органом который также йьшолнен в виде цепи 6, охватывающей внизу приводную звездочку 7 и вверху - ролик 8, который мо-. жет быть выполнен также в виде звез- дочки.
Привод подъемника состоит из электродвигателя 9 и червячной самотормозящейся передачи 10, кин(5матнчески связанной с приводной звездочкой 7. Мачта 1 снабжена зубчатой рейкой П, расположенной на одной из направляющих 12, а каретка 2 - собачкой 13, взаимодействующей с зубьями рейки -П рычага 14, расположенного на противо- положном конце собачки 3 за ее осью 15 вращения. -Собачка 13 и рычаг 14 установлены на оси 15. Собачка 13 препятствует опусканию каретки 2, не препятствуя при этом ее подъему. Со стороны, противоположной размещению рейки 11, .на направляющей 16 смонтирован по всей длине мачты 1 стержень 17 на подвесках 18, которые щарнщшо
соединены с ним и направляющей 16. Стержень 17 может занимать два положения, быть поднятым (фиг.З) или опущенным, при этом подвески 18 принимают положение, близкое к горизонтальному, и сдвигают стержень 17 вправо, до взаимодействия с головкой 19 рычага 14, вследствие чего он может Повернуть собачку 13 также вправо в такое положение, при котором она не взаимодействует с зубьями рейки 11. Приводом стержня 17 может быть (не показано) пневмоцилиндр, электромагнит или рычаг с ручным управлением.
Каретка 2 представляет собой раму 20, оснащенную ходовыми роликами 21, перекатывающимися по направляющим 12 и 16 мачты 1. В средней части рамы
20расположены два ролика 22 и 23, изменякяцие направление, консоли 3 из вертикального в горизонтальное. Над консолью 3 размещена собачка 24, фиксирующая консоль 3 на необходимом удалении от ма.чты |. Собачка 24 взан- модействует с осямн 25, соединякяцнмн- ся звеньями 26 цепи, выполняющей роль консоли 3. Собачка 24 приводится в действие за счет собственной силы тяжести и силы тяжести изогнутого рычага 27, при этом конец рычага 27 смещен за пределы роликов 21 (фнг.З).
Против рычага 27 на направлякицей
21смонтирован также по всей длине мачты 1 стержень 28 на подвесках 29. Стержень 28 также может заннйать два пoлJжeния, верхнее (фиг.2 и 3) и нижнее, когда подвески 29 принимают положение близкое к вертикальному,прн этом стержень 28 может взаимодействовать с рычагом 27 собачки 24. Привод для стержнд 28 может таким же как и для стержня J7.
Устанавливается подъемник против проемов обслуживаемого здания 30, например против окон 31, на таком расстоянии, чтобы наибольший поднимаемый груз 5 мог беспрепятственно пройти между мачтой I и стеной здания. Возможно также снабженные подъ- .емника колесами, с целью перемещения его вдоль здания, для обслуживания всех его проемов.
Каретка 2 снабжена полиэтиленовым вкладышем 32, закрепленным на раме 20, предупреждающим отклонение звеньев 26 консоли 3 от ролика 22.
Строительный подъемник работает следующим обр азом.
Поднимаемый груз подвешивается к крюку 4 при опущенной каретке 2, при этом консоль 3 выдвинута настолько, чтобы груз 5 не касался мачты 1 здания 30.
Включается электродвигатель 9 на подъем груза, при этом каретка 2 поднимается, так как консоль 3 застопорена собачкой 2А, а в верхней части связана с цепью 6, которая увлекает за собой. При подъеме 2 со- -бачка 13 скользит по зубьям рейки 11 и при ее остановке,.например, против окна 31.взаимодействует с одним из зубьев, предупреждая самопроизвольное опускание каретки. В этом положении включают электродвигатель 9 на обратное вращение, вследствие чего расположенная около каретки ветвь цепи 6, связанная консолью 3, начинает опускаться. При этом каретка 2, застопоренная собачкой 13, остается на месте, а консоль 3, толкаемая цепью 6 и огибая ролик 22, опираясь на ролик 23, вьщвигается из каретки 2, перемещая в окно 31 груз 5 до тех пор, пока он не окажется внутри здания 30 на требуемом расстоянии от его стены. После этого опускают стержень 17 вниз, вследствие чего он отклоняется вправо и нажимает на рычаг 14, который при кратковременном вклю чении электродвигателя 9 на подъем выводит собачку 13 из зацепления с рейкой 11. После этого включают электродвигатель на опускание, при этом груз 5 опускается вместе с кареткой . 2, так как консоль 3 застопорена собачкой 24, После полного опускания груза 5 и снятия его с Крюка 4 под
нимают стержень 17 в прежнее положение и опускают стержень 28, при этом стержень, взаимодействуя с рычагом 27 расстопоривает консоль 3. Далее включают электродвигатель 9 на подъем. При этом каретка застопоривается собачкой 13, а консоль 3 убирается из горизонтального положения в вертикальное, и когда она аймет первоначальное положение, ее посредством подъема стержня 28 застопоривают, а опусканием стержня 17 расстопорива- ют каретку 2 и, переключив электродвигатель 9, опускают для нового подъема груза. Если требуется, например, забрать груз с верхнего этажа, то каретку 2, не растопоривая, поднимают выше, при этом соблюдается та же пос
ледовательность операций, как и при подъеме груза 5 на предццущий этаж.
Формула изобретения
выполнен в виде бесконечной цепи, ох- ватьшающей приводную звездочку и ролик.
21
| Строительный подъемник | 1984 |
|
SU1245534A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| . | |||
